También podría gustarte
- Ejemplo Concepto TecnicoDocumento1 páginaEjemplo Concepto TecnicoNelson Enrique BohadaAún no hay calificaciones
- Sumadora Utilizando El PIC 16F877ADocumento7 páginasSumadora Utilizando El PIC 16F877AMishel BisarreaAún no hay calificaciones
- Ejercicios Resueltos Del Curso de Micro Controlador Atmega8Documento4 páginasEjercicios Resueltos Del Curso de Micro Controlador Atmega8catherinetoledoAún no hay calificaciones
- Protocolo Atm en GNS3Documento7 páginasProtocolo Atm en GNS3Maria Fernanda Rodriguez PeñaAún no hay calificaciones
- Proyecto Final VHDLDocumento14 páginasProyecto Final VHDLFortino50% (2)
- Ataque Ético Externo - Ataque Ético Interno (Documento33 páginasAtaque Ético Externo - Ataque Ético Interno (Carlos Sampedro100% (1)
- Redundancia Entre Routers Con HSRPDocumento10 páginasRedundancia Entre Routers Con HSRPhflores1976Aún no hay calificaciones
- Implementacion Basica de PicoblazeDocumento14 páginasImplementacion Basica de PicoblazeFabian BallenAún no hay calificaciones
- Caso Electrolitos UvegDocumento4 páginasCaso Electrolitos Uvegmariana rojas100% (2)
- Informe de Electrónica Digital, Corregido .Documento10 páginasInforme de Electrónica Digital, Corregido .Ariel GálvezAún no hay calificaciones
- 5M2M Examen Auto y Rob Parcial 2Documento3 páginas5M2M Examen Auto y Rob Parcial 2Leobardo GutierrezAún no hay calificaciones
- Multivibrador AstableDocumento2 páginasMultivibrador Astableteleconocimiento100% (1)
- EsquemaDocumento71 páginasEsquemaCesarAún no hay calificaciones
- Evaluacion DomoticaDocumento3 páginasEvaluacion DomoticaPaul SarabiaAún no hay calificaciones
- Ejemplos 16f84Documento23 páginasEjemplos 16f84Fidel Contreras SotoAún no hay calificaciones
- EJERCICIOS ASM 4bis y 5 RESUELTOSDocumento8 páginasEJERCICIOS ASM 4bis y 5 RESUELTOSGuillermo GutierrezAún no hay calificaciones
- Practica 3 Microcomputadoras KariDocumento5 páginasPractica 3 Microcomputadoras KariSeikayueAún no hay calificaciones
- EJERCICIOS ASM 1 y 2 RESUELTOSDocumento13 páginasEJERCICIOS ASM 1 y 2 RESUELTOSgglrAún no hay calificaciones
- Pic Servomotor AssemblerDocumento4 páginasPic Servomotor AssemblerAbraham SAROAún no hay calificaciones
- Multivibrador Monoestable Con Op-AmpDocumento3 páginasMultivibrador Monoestable Con Op-AmpAnais M Diaz CAún no hay calificaciones
- Solucion - EXAMEN FINAL DE CONTROL DIGITALDocumento5 páginasSolucion - EXAMEN FINAL DE CONTROL DIGITALJuan Manuel VargasAún no hay calificaciones
- Instrucciones Orientadas A RegistrosDocumento41 páginasInstrucciones Orientadas A RegistrosChristian UbillusAún no hay calificaciones
- Codificador Binario A BCDDocumento11 páginasCodificador Binario A BCDFidel Angel Baquero Lagos75% (4)
- Taller 2Documento2 páginasTaller 2api-3711530Aún no hay calificaciones
- Capítulo 3Documento40 páginasCapítulo 3Tomas Tapia Iñiguez0% (2)
- Electronica DigitalDocumento26 páginasElectronica DigitalEugenio PelaezAún no hay calificaciones
- Diseño de Controlador Tipo PIDDocumento10 páginasDiseño de Controlador Tipo PIDJorge CarpioAún no hay calificaciones
- 4 Ejercicios Resueltos de MicrocontroladoresDocumento29 páginas4 Ejercicios Resueltos de MicrocontroladoresDavid EscobarAún no hay calificaciones
- Reporte Practica #2Documento14 páginasReporte Practica #2SylvIa RosalesAún no hay calificaciones
- Ejercicio VLSMDocumento1 páginaEjercicio VLSMJoffre AsencioAún no hay calificaciones
- Instrucciones Del PIC16F84A y ATMEGA328Documento3 páginasInstrucciones Del PIC16F84A y ATMEGA328Luis Fernando Ayasta PortocarreroAún no hay calificaciones
- Circuitos de Disparo en PotenciaDocumento4 páginasCircuitos de Disparo en Potencialuis Angel Martinez Figueroa100% (1)
- Contador Asíncrono Descendente Con Biestables Tipo TDocumento3 páginasContador Asíncrono Descendente Con Biestables Tipo TEvelyn MoranAún no hay calificaciones
- Codigo en MikroC para Sumar y Multiplicar en Display de 7 SegmentosDocumento2 páginasCodigo en MikroC para Sumar y Multiplicar en Display de 7 SegmentosOskar100% (1)
- Protocolo BSC PDFDocumento11 páginasProtocolo BSC PDFjesusbello124_36359Aún no hay calificaciones
- Circuito Integrado 74LS00Documento3 páginasCircuito Integrado 74LS00Christian Aranzamendi100% (2)
- Instrucciones PIC16F84A PDFDocumento44 páginasInstrucciones PIC16F84A PDFfusti_88100% (2)
- Laboratorio 3 Gradiente Divergencia y Rotacional Con MatlabDocumento11 páginasLaboratorio 3 Gradiente Divergencia y Rotacional Con MatlabStiven AmayaAún no hay calificaciones
- Manual-Generador de Funciones Tektronix AFG3021Documento4 páginasManual-Generador de Funciones Tektronix AFG3021Antonio Velazquez ArzolaAún no hay calificaciones
- Manejo de Display de 7 Segmentos y 4 Dígitos MIKROCDocumento2 páginasManejo de Display de 7 Segmentos y 4 Dígitos MIKROCArturo ZambranoAún no hay calificaciones
- EjerciciosTema2 Con Sol v1Documento12 páginasEjerciciosTema2 Con Sol v1Carmen Gonzalez LopezAún no hay calificaciones
- Laboratorio2 MEDIA DE VALOR MEDIO Y EFICAZDocumento16 páginasLaboratorio2 MEDIA DE VALOR MEDIO Y EFICAZAngel MejiaAún no hay calificaciones
- Diseño Oscilador ColpittsDocumento6 páginasDiseño Oscilador ColpittsKARLA LILIANA PENAGOS VIATELAAún no hay calificaciones
- Ejercicios Transistores NMOS y PMOS 1Documento2 páginasEjercicios Transistores NMOS y PMOS 1Sara MendezAún no hay calificaciones
- Osciladores Mono Estable y Astables, Ejercicios ResueltosDocumento5 páginasOsciladores Mono Estable y Astables, Ejercicios ResueltosElectronica TelecomunicacionesAún no hay calificaciones
- Informe ProyectoDocumento6 páginasInforme ProyectoJorge ZambranoAún no hay calificaciones
- Taller 3 - MIP1 BorradorDocumento8 páginasTaller 3 - MIP1 BorradorkhailsteelAún no hay calificaciones
- Filtrado Rechaza Banda Filtro NOTCHDocumento7 páginasFiltrado Rechaza Banda Filtro NOTCHCristianGordilloAún no hay calificaciones
- ProyectoDocumento2 páginasProyectoScrapyAún no hay calificaciones
- 5 Codificadores y DecodificadoresDocumento16 páginas5 Codificadores y DecodificadoresOscar Pardo PardoAún no hay calificaciones
- Practica 1 y 2Documento11 páginasPractica 1 y 2Abel CabaAún no hay calificaciones
- Control de Potencia para Microcontroladores y Compatible Con ArduinoDocumento1 páginaControl de Potencia para Microcontroladores y Compatible Con ArduinoUlises Santos LópezAún no hay calificaciones
- Lab 1 2do ParcialDocumento9 páginasLab 1 2do ParcialFernando Siñani ApazaAún no hay calificaciones
- Electronica Teoria de Circuitos BoylestadDocumento11 páginasElectronica Teoria de Circuitos BoylestadBolivar Gavilanez AcostaAún no hay calificaciones
- Interfase Periférica Programable (PPI - 8255) : Arquitectura de ComputadorasDocumento20 páginasInterfase Periférica Programable (PPI - 8255) : Arquitectura de ComputadorasRoberto Carlos Torres ChiritoAún no hay calificaciones
- Introducción A AhplDocumento23 páginasIntroducción A AhplArturo72100% (1)
- SUBLWDocumento4 páginasSUBLWDéboraRoblesUicabAún no hay calificaciones
- Práctica de Laboratorio 18 Enlace Troncal Con ISLDocumento7 páginasPráctica de Laboratorio 18 Enlace Troncal Con ISLIsmael Ramirez ZamoraAún no hay calificaciones
- Practica 1 Compensador de Tipo Pasivo de Adelanto de FaseDocumento14 páginasPractica 1 Compensador de Tipo Pasivo de Adelanto de FaseDaniel Reyes Vasquez100% (1)
- SEMAFORODocumento4 páginasSEMAFOROSergio RosalesAún no hay calificaciones
- Practica 1 Encender Leds PIC16F887Documento5 páginasPractica 1 Encender Leds PIC16F887Sergio Angeles RiveroAún no hay calificaciones
- Programa Auto FantasticoDocumento10 páginasPrograma Auto FantasticoBus NunezAún no hay calificaciones
- Ejemplos PICDocumento33 páginasEjemplos PICMatsudaAún no hay calificaciones
- Asm PracticasDocumento18 páginasAsm Practicastlaloc125Aún no hay calificaciones
- Control de Semáforos y EnsambladorDocumento7 páginasControl de Semáforos y EnsambladorAlex DiazAún no hay calificaciones
- TDRDocumento2 páginasTDRLiliana Elera0% (1)
- VENTAJAS Y DESVENTAJAS DE IMPLEMENTAR SIP-IP Phones-ATADocumento2 páginasVENTAJAS Y DESVENTAJAS DE IMPLEMENTAR SIP-IP Phones-ATADuval Mena paredesAún no hay calificaciones
- Windows Server 2003 Configurar RRASDocumento26 páginasWindows Server 2003 Configurar RRASjmariachiAún no hay calificaciones
- Manual AguaPeyDocumento4 páginasManual AguaPeyLuciana FerraraAún no hay calificaciones
- Jefferson - Poblete Informe MPLSDocumento18 páginasJefferson - Poblete Informe MPLSJefferson Poblete SchmidtAún no hay calificaciones
- Matriz de Escalamiento de FallasDocumento2 páginasMatriz de Escalamiento de Fallasaleixo ederAún no hay calificaciones
- Tarea 1 LÍNEA DEL TIEMPO SOBRE LA INFORMÁTICADocumento6 páginasTarea 1 LÍNEA DEL TIEMPO SOBRE LA INFORMÁTICADiego QuinteroAún no hay calificaciones
- Alfresco Manual Aleja ListoDocumento41 páginasAlfresco Manual Aleja ListoalejandraAún no hay calificaciones
- Template POS CET TD ExampleDocumento16 páginasTemplate POS CET TD ExampleCrowns JesúsAún no hay calificaciones
- InternetDocumento22 páginasInternetapi-26277412100% (1)
- El Subneteo en RedesDocumento5 páginasEl Subneteo en RedesFreddy Yulan MenendezAún no hay calificaciones
- Mapa-Linea de Tiempo Evolucion Sistemas OperativosDocumento5 páginasMapa-Linea de Tiempo Evolucion Sistemas OperativosyulyrosAún no hay calificaciones
- AS - Programa de Auditoria Informática PDFDocumento4 páginasAS - Programa de Auditoria Informática PDFedue slipAún no hay calificaciones
- Hitachi Led TV CDH Le3afd18 PDFDocumento25 páginasHitachi Led TV CDH Le3afd18 PDFSandra FleitasAún no hay calificaciones
- Desarrollo e Implementacion de Sistemas de InformaciónDocumento35 páginasDesarrollo e Implementacion de Sistemas de InformaciónMiguel PerezAún no hay calificaciones
- Metrel D.D. - MI 2016 Multi LAN 350Documento3 páginasMetrel D.D. - MI 2016 Multi LAN 350Alexis Albiña DiazAún no hay calificaciones
- Diagrama de FlujoDocumento10 páginasDiagrama de Flujojairis herreraAún no hay calificaciones
- Introduccion A Seguridad InformaticaDocumento44 páginasIntroduccion A Seguridad InformaticaWilly PinedaAún no hay calificaciones
- Que Es Una Aplicacion Web ProgresivaDocumento4 páginasQue Es Una Aplicacion Web ProgresivaIvanMendozaAún no hay calificaciones
- Actividades Auditables - PIDocumento4 páginasActividades Auditables - PIAlex Alfredo Huaman LlanosAún no hay calificaciones
- Cómo Mapear El Mouse en LinuxDocumento4 páginasCómo Mapear El Mouse en LinuxAlvaro SamudioAún no hay calificaciones
- Codigo Ascii n0Documento5 páginasCodigo Ascii n0Mario1996Aún no hay calificaciones
- Circuitos Secuenciales 6Documento20 páginasCircuitos Secuenciales 6Gustavo PaisAún no hay calificaciones
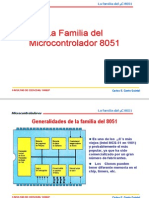
- 4 El8051Documento12 páginas4 El8051alexciviAún no hay calificaciones
- 02 Examen Complexivo - Interconectividad - Sin Respuestas PDFDocumento9 páginas02 Examen Complexivo - Interconectividad - Sin Respuestas PDFCarlos Guarquila BalsecaAún no hay calificaciones