También podría gustarte
- Manual de Instrucciones para Las ReparacionesDocumento984 páginasManual de Instrucciones para Las ReparacionesCLADIONOR DIAS100% (1)
- Entrenamiento de La FlexibilidadDocumento23 páginasEntrenamiento de La FlexibilidadGhus Tav100% (1)
- Materiales Compuestos 2Documento66 páginasMateriales Compuestos 2SebastianArocaAún no hay calificaciones
- Gestion de Riesgos y Desastres IndeciDocumento43 páginasGestion de Riesgos y Desastres IndeciMUNICIPALIDAD DISTRITAL DE DESAGUADEROAún no hay calificaciones
- Fase3, Ej 1,2,3Documento2 páginasFase3, Ej 1,2,3DIEGO CASTILLOAún no hay calificaciones
- Version Preliminar de La Politica Nacional Multisectorial de Salud PDFDocumento118 páginasVersion Preliminar de La Politica Nacional Multisectorial de Salud PDFGhus TavAún no hay calificaciones
- Introduccion A KNX PDFDocumento170 páginasIntroduccion A KNX PDFJuan Antonio Gualda Garcia100% (4)
- Pr015-Gite Ti v01Documento8 páginasPr015-Gite Ti v01Ghus TavAún no hay calificaciones
- Fuerzas CompetitivasDocumento11 páginasFuerzas CompetitivasGhus TavAún no hay calificaciones
- Cronograma de Actividades RLV CLV 100%Documento1 páginaCronograma de Actividades RLV CLV 100%Ghus TavAún no hay calificaciones
- Excepciones en Visual BasicDocumento8 páginasExcepciones en Visual BasicGhus TavAún no hay calificaciones
- Fuerzas CompetitivasDocumento11 páginasFuerzas CompetitivasGhus TavAún no hay calificaciones
- Formulario Intervalos de ConfianzaDocumento1 páginaFormulario Intervalos de ConfianzaGhus TavAún no hay calificaciones
- Manual de ERStudioDocumento20 páginasManual de ERStudioGhus TavAún no hay calificaciones
- Sep02 Procesos SecuencialesDocumento40 páginasSep02 Procesos SecuencialesGhus TavAún no hay calificaciones
- Introducción A Molinos SAGDocumento85 páginasIntroducción A Molinos SAGEmmanuel SaavAún no hay calificaciones
- Sistema de Equilibrio QuímicoDocumento3 páginasSistema de Equilibrio QuímicoBorisMaldiniRodriguezCalvimontesAún no hay calificaciones
- 5 Aduccion de Agua Por BombeoDocumento24 páginas5 Aduccion de Agua Por BombeoJhimmyAún no hay calificaciones
- AROMATERAPIADocumento50 páginasAROMATERAPIAHeron DmzAún no hay calificaciones
- Manual de Practicas Física ClasicaDocumento52 páginasManual de Practicas Física ClasicaHector Ma NAún no hay calificaciones
- Flectores SincronDocumento3 páginasFlectores SincronDavid Marchal HernandezAún no hay calificaciones
- Cancion en MayaDocumento6 páginasCancion en MayaYe MontesAún no hay calificaciones
- Contenido de HumedadDocumento10 páginasContenido de HumedadWalterFredyGutierrezCanazaAún no hay calificaciones
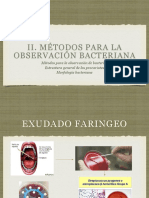
- II. Métodos para La Observación BacterianaDocumento41 páginasII. Métodos para La Observación BacterianaYessica SanchezAún no hay calificaciones
- FRaccionamiento CelularDocumento2 páginasFRaccionamiento CelularFlorencia GabrielaAún no hay calificaciones
- Síntesis de IndolesDocumento4 páginasSíntesis de IndolesSandyCoronadoAún no hay calificaciones
- Tarea 5 Ley de Hooke y ElasticidadDocumento2 páginasTarea 5 Ley de Hooke y ElasticidadLuisCamiloEPAún no hay calificaciones
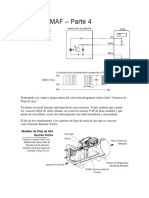
- Sensores MAFDocumento4 páginasSensores MAFAlberto M FuentesAún no hay calificaciones
- MEDIDAS DE TENDENCIA CENTRAL UtsDocumento5 páginasMEDIDAS DE TENDENCIA CENTRAL UtsGretmar Jose Montero CabelloAún no hay calificaciones
- Mecanismo Equilibrio CitoplasmaDocumento14 páginasMecanismo Equilibrio CitoplasmaAndrea OsorioAún no hay calificaciones
- Fisica-Ejercicios TermodinamicaDocumento3 páginasFisica-Ejercicios TermodinamicaGray D L LeoAún no hay calificaciones
- Ventilador Centrífugo Modelo CMT (SODECA)Documento3 páginasVentilador Centrífugo Modelo CMT (SODECA)Julio OrtegaAún no hay calificaciones
- Cojinetes y RodamientosDocumento8 páginasCojinetes y RodamientosCarlos Ignacio Sarmiento GarcíaAún no hay calificaciones
- El Movimiento de Los VehículosDocumento11 páginasEl Movimiento de Los VehículosNABIUR SOIRAún no hay calificaciones
- Manual AIDEPLADocumento112 páginasManual AIDEPLAIndicadores MercaboyAún no hay calificaciones
- Especialidad AstronomiaDocumento5 páginasEspecialidad AstronomiaElizabeth RodriguezAún no hay calificaciones
- Practica de Colorimetría Con Sulfato de CobreDocumento7 páginasPractica de Colorimetría Con Sulfato de CobreValentinaAún no hay calificaciones
- Modelos AtómicosDocumento3 páginasModelos AtómicosANGELA MERARI GOMEZ JUAREZAún no hay calificaciones
- Guia de TermoDocumento2 páginasGuia de TermoSantosErnestoMamaniApazaAún no hay calificaciones
- Problemas de Quimica IIDocumento1 páginaProblemas de Quimica IIHans MedinaAún no hay calificaciones