También podría gustarte
- Fundamentos de electrónica analógicaDe EverandFundamentos de electrónica analógicaCalificación: 5 de 5 estrellas5/5 (1)
- Introduccion Electronica de PotenciaDocumento27 páginasIntroduccion Electronica de PotenciaLuis Alejandro Castro Caraballo100% (1)
- Simulación de circuitos electrónicos con OrCAD® PSpice®De EverandSimulación de circuitos electrónicos con OrCAD® PSpice®Aún no hay calificaciones
- Presentación Amplificador OperacionalDocumento26 páginasPresentación Amplificador Operacionalaide dominguezAún no hay calificaciones
- Disparos SCRDocumento30 páginasDisparos SCRROCIO YAZOAún no hay calificaciones
- Eficiencia Energetica en Edificaciones Residenciales PDFDocumento11 páginasEficiencia Energetica en Edificaciones Residenciales PDFKaterin R GarciaAún no hay calificaciones
- Facts PotenciaDocumento17 páginasFacts PotenciaLitman Arostegui CubillosAún no hay calificaciones
- Reporte Fuente 24 VDocumento11 páginasReporte Fuente 24 VjesusAún no hay calificaciones
- Problemas Resuelto de Corriente Continua1 1233239398089066 2Documento25 páginasProblemas Resuelto de Corriente Continua1 1233239398089066 2Jeisson GutierrezAún no hay calificaciones
- Acondicionamiento de Señales para Un TermoparDocumento8 páginasAcondicionamiento de Señales para Un Termoparosvaldo23Aún no hay calificaciones
- Cómo Funciona Un Inversor de CorrienteDocumento3 páginasCómo Funciona Un Inversor de CorrienteFrancisco OrtizAún no hay calificaciones
- Practica 4 El Tiristor SCRDocumento5 páginasPractica 4 El Tiristor SCRCesar ChavezAún no hay calificaciones
- C15Documento34 páginasC15Patricio AramburuAún no hay calificaciones
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Levitador Magnetico 1 (Informe Ieee)Documento4 páginasLevitador Magnetico 1 (Informe Ieee)misusibuAún no hay calificaciones
- Curso de Electronica DigitalDocumento79 páginasCurso de Electronica DigitalLogan Marquez AguayoAún no hay calificaciones
- Transistor IGBTDocumento4 páginasTransistor IGBTg5857pAún no hay calificaciones
- Electronica de PotenciaDocumento29 páginasElectronica de Potenciaosferrojo100% (5)
- APLICACIONES de Triac PDFDocumento104 páginasAPLICACIONES de Triac PDFTanoLF100% (1)
- Exposición - Tiristores y Transistores de PotenciaDocumento84 páginasExposición - Tiristores y Transistores de PotenciaLuis Fernando AriasAún no hay calificaciones
- MOSFET de PotenciaDocumento33 páginasMOSFET de PotenciaLeón BocanegraAún no hay calificaciones
- Transistores IGBTDocumento10 páginasTransistores IGBTArnold Arley Pineda Valbuena100% (3)
- Conversores DAC y ADC Con PIC16F877ADocumento23 páginasConversores DAC y ADC Con PIC16F877Adavicho4780% (5)
- 27 - Polarizacion de Los FETDocumento11 páginas27 - Polarizacion de Los FETGerardo MartinezAún no hay calificaciones
- Diseño de Un Motor BrushlessDocumento41 páginasDiseño de Un Motor Brushlesssamuel67% (3)
- Electrónica de PotenciaDocumento6 páginasElectrónica de Potenciaaconquistar_22Aún no hay calificaciones
- Amplificador de Audio Ampliable en PotenciaDocumento8 páginasAmplificador de Audio Ampliable en PotenciaCarlos ToMenAún no hay calificaciones
- Cable Conexion SyslinkDocumento1 páginaCable Conexion SyslinkRufino LópezAún no hay calificaciones
- Tipos de DiodosDocumento6 páginasTipos de DiodosJuan Carlos Sanchez100% (1)
- Circuitos de Control de Disparo para El SCRDocumento8 páginasCircuitos de Control de Disparo para El SCRbryan beltran adrianAún no hay calificaciones
- Capitulo 9 - TiristoresDocumento83 páginasCapitulo 9 - TiristoresEduardo Méndez100% (1)
- Puente de Wheastone Con PotenciometroDocumento7 páginasPuente de Wheastone Con PotenciometrodartoloAún no hay calificaciones
- Igbt - TRANSISTOR BIPOLAR DE PUERTA AISLADADocumento25 páginasIgbt - TRANSISTOR BIPOLAR DE PUERTA AISLADABrian Ruiz100% (1)
- Transistor IgbtDocumento15 páginasTransistor IgbtAnonymous CQOau8100% (2)
- DinamoDocumento49 páginasDinamoJulio Guerra C.Aún no hay calificaciones
- Parte 12 VHDL Lenguaje de Descripcion de Hardware EnviarDocumento110 páginasParte 12 VHDL Lenguaje de Descripcion de Hardware Enviarhoola100% (2)
- Latch's y Flip-FlopDocumento21 páginasLatch's y Flip-FlopWilmar Yovany RojasAún no hay calificaciones
- Sds1000x&Xplus Usermanual Um0101x-E02a EsDocumento235 páginasSds1000x&Xplus Usermanual Um0101x-E02a EsAngel Genicio SorribesAún no hay calificaciones
- Codificación Del Amplificador OperacionalDocumento11 páginasCodificación Del Amplificador Operacionalanon_9676747100% (1)
- PC Cuadrada Pulsos Multiples UnipolarDocumento51 páginasPC Cuadrada Pulsos Multiples Unipolarbryan eduardo villegas carrascoAún no hay calificaciones
- Control Analógico de Posición de Motor DCDocumento5 páginasControl Analógico de Posición de Motor DCBryan Samos AlbornozAún no hay calificaciones
- Electronica de PotenciaDocumento22 páginasElectronica de PotenciaOliver VasquezAún no hay calificaciones
- 3 - Transistores Amplificacion RealimentacionDocumento88 páginas3 - Transistores Amplificacion RealimentacionWalter GarcíaAún no hay calificaciones
- Ejercicios InversoresDocumento8 páginasEjercicios InversoresWilmerAún no hay calificaciones
- Diseño y Construcción de Un Inversor de Energía de 200 WattDocumento50 páginasDiseño y Construcción de Un Inversor de Energía de 200 WattEsengas SacAún no hay calificaciones
- Código BCDDocumento15 páginasCódigo BCDJaime FernandezAún no hay calificaciones
- Proyectos de Circuitos ElectricosDocumento2 páginasProyectos de Circuitos ElectricosMarco MasAún no hay calificaciones
- Práctica 3 - Control de Temperatura Con Amplificador OperacionalDocumento8 páginasPráctica 3 - Control de Temperatura Con Amplificador OperacionalArturo Mendoza100% (1)
- Convertidores DC-DC PDFDocumento108 páginasConvertidores DC-DC PDFMarcos VeraAún no hay calificaciones
- Apuntes Electrónica de PotenciaDocumento13 páginasApuntes Electrónica de PotenciaBryan Andres Reyes CaamañoAún no hay calificaciones
- Convertidores CD CD - 2Documento19 páginasConvertidores CD CD - 2drakon91Aún no hay calificaciones
- Diodo Configuración Doblador de VoltajeDocumento2 páginasDiodo Configuración Doblador de VoltajePaoand76Aún no hay calificaciones
- Práctica 5 Colector ComunDocumento14 páginasPráctica 5 Colector ComunRamiro Avalos VegaAún no hay calificaciones
- Ci 555 VcoDocumento8 páginasCi 555 VcoGregory Isidor ViRoAún no hay calificaciones
- Amplificador OperacionalDocumento5 páginasAmplificador OperacionalFreddy Lp RoblesAún no hay calificaciones
- Controladores de Voltaje CaDocumento18 páginasControladores de Voltaje CaThalia MorelAún no hay calificaciones
- FACTS en Sistemas Eléctricos de Potencia. PDFDocumento3 páginasFACTS en Sistemas Eléctricos de Potencia. PDFLaureano RoblesAún no hay calificaciones
- Física II - Primera Parte - 506 - Rodríguez González José IgnacioDocumento31 páginasFísica II - Primera Parte - 506 - Rodríguez González José IgnacioRodríguez González José IgnacioAún no hay calificaciones
- Bombas de Agua EólicasDocumento4 páginasBombas de Agua EólicasLauroArandaMacedoAún no hay calificaciones
- 11 RadiaciónDocumento31 páginas11 Radiacióndoqq100% (1)
- Propuerta de Implementacion de Subestacion Subestacion Tipo Nodal-2007Documento103 páginasPropuerta de Implementacion de Subestacion Subestacion Tipo Nodal-2007DanielAlejandroRamosQueroAún no hay calificaciones
- Formulario de Física - Energía Mecánica y TrabajoDocumento1 páginaFormulario de Física - Energía Mecánica y TrabajoYussell MontalvoAún no hay calificaciones
- SECCION 7 SECUENCIA II 300 MW Rev B - 07ABR22Documento304 páginasSECCION 7 SECUENCIA II 300 MW Rev B - 07ABR22Carlos Abraham Noble MissettAún no hay calificaciones
- Un Generador Eléctrico Es Todo Dispositivo Capaz de Mantener Una Diferencia de Potencial Eléctrico Entre Dos de Sus PuntosDocumento4 páginasUn Generador Eléctrico Es Todo Dispositivo Capaz de Mantener Una Diferencia de Potencial Eléctrico Entre Dos de Sus PuntosLorena RamirezAún no hay calificaciones
- Formando Líderes Innovadores Con Equidad, Justicia E InclusiónDocumento5 páginasFormando Líderes Innovadores Con Equidad, Justicia E InclusiónJoha GuanoluisaAún no hay calificaciones
- Subestaciones ElectricasDocumento6 páginasSubestaciones ElectricasRoberto Joaldo PeñaAún no hay calificaciones
- Estándares Basicos de Ciencias Naturales 6º A 7ºDocumento3 páginasEstándares Basicos de Ciencias Naturales 6º A 7ºMontoya C JulioAún no hay calificaciones
- Universidad Nacional de PiuraDocumento15 páginasUniversidad Nacional de PiuraRolly Nizama IpanaquéAún no hay calificaciones
- Cisar Catalogo General Condensadores Correccion Factor Potencia ESDocumento38 páginasCisar Catalogo General Condensadores Correccion Factor Potencia ESMarco Antonio Moreno PulidoAún no hay calificaciones
- Resumen Ley de AtraccionDocumento21 páginasResumen Ley de AtraccionChristhopher Criollo OrtizAún no hay calificaciones
- 722 B 010 FasterDocumento2 páginas722 B 010 FasterZed ElspethAún no hay calificaciones
- Mochila Con Panel Solar (Proyecto)Documento11 páginasMochila Con Panel Solar (Proyecto)pasttrulin1267% (3)
- Apuntes de Clase - Economia AgropecuariaDocumento286 páginasApuntes de Clase - Economia AgropecuariaWilder Vergara Castaño100% (1)
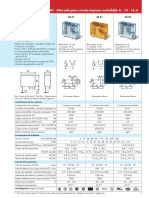
- Finder Reles Serie 40Documento8 páginasFinder Reles Serie 40Jorge Luis MalagonAún no hay calificaciones
- Tesis PLAN EMERGENCIA Ramon LagunaDocumento131 páginasTesis PLAN EMERGENCIA Ramon LagunaJuan Jose MonteroAún no hay calificaciones
- Actividad Clase 04-2ano Disena I BimestreDocumento4 páginasActividad Clase 04-2ano Disena I BimestreDanitza MerinoAún no hay calificaciones
- Aplicaciones de Los Generadores de CDDocumento3 páginasAplicaciones de Los Generadores de CDerokaAún no hay calificaciones
- Presentaciones Congreso InternacionalDocumento10 páginasPresentaciones Congreso InternacionalRafael UtrillaAún no hay calificaciones
- Manual Hidrolavadora Motor Eléctrico Weg 5hp @1730rpmDocumento1 páginaManual Hidrolavadora Motor Eléctrico Weg 5hp @1730rpmRicardo CabreraAún no hay calificaciones
- Lineas de Transmision-DidacticoDocumento120 páginasLineas de Transmision-DidacticoLuis CarrilloAún no hay calificaciones
- 5 Segundo Parcial TermoDocumento3 páginas5 Segundo Parcial TermoAndresAún no hay calificaciones
- Reacciones ExotérmicaDocumento25 páginasReacciones ExotérmicaJmena6Aún no hay calificaciones
- Vehiculos Electricos 2019Documento10 páginasVehiculos Electricos 2019Níckolas ValverdeAún no hay calificaciones
- Tuberia de Cobre Gas LPDocumento14 páginasTuberia de Cobre Gas LPChuncho xD100% (1)
- Simbolos de Alerta - 262DDocumento4 páginasSimbolos de Alerta - 262Djorge.quiquijana14Aún no hay calificaciones
- Practica 1Documento8 páginasPractica 1Alejandra AguirreAún no hay calificaciones