También podría gustarte
- Ejemplos System VerilogDocumento18 páginasEjemplos System VerilogjefersonAún no hay calificaciones
- Guia NIOS IIDocumento19 páginasGuia NIOS IIVader JohnsonAún no hay calificaciones
- Tema 1 - Introduccion Verilog FPGA 14-Febrero-2018Documento109 páginasTema 1 - Introduccion Verilog FPGA 14-Febrero-2018Maria JoseAún no hay calificaciones
- WEG Rele Programable Controlador Programable TP 03 y Interfaz Hombre Maquina 50029483 Catalogo EspanolDocumento16 páginasWEG Rele Programable Controlador Programable TP 03 y Interfaz Hombre Maquina 50029483 Catalogo EspanolGiovanni HFAún no hay calificaciones
- Lab DiseñoDocumento8 páginasLab DiseñoEMAún no hay calificaciones
- Practica de Compuertas Logicas BasicasDocumento8 páginasPractica de Compuertas Logicas BasicasDafne MedinaAún no hay calificaciones
- Guía de Realización de Las Prácticas Utilizando La Placa DE2 de Altera - 6166Documento70 páginasGuía de Realización de Las Prácticas Utilizando La Placa DE2 de Altera - 6166vicman001Aún no hay calificaciones
- Wa0041 PDFDocumento36 páginasWa0041 PDFMauricio MontañoAún no hay calificaciones
- Instrum Medi Prueb Electrcion2012Spanish V01Documento48 páginasInstrum Medi Prueb Electrcion2012Spanish V01m_reyes_11Aún no hay calificaciones
- GUIA PRACTICAS Ver5 PDFDocumento16 páginasGUIA PRACTICAS Ver5 PDFMauricio MontañoAún no hay calificaciones
- Catálogo de ABB de Detectores de ProximidadDocumento14 páginasCatálogo de ABB de Detectores de ProximidadLuisAún no hay calificaciones
- Capitulo A Diseno General Normativa Potencia InstaladaDocumento28 páginasCapitulo A Diseno General Normativa Potencia InstaladarcigaAún no hay calificaciones
- Tipos de SeñalesDocumento3 páginasTipos de SeñalesipozasAún no hay calificaciones
- Verilog USMDocumento16 páginasVerilog USMRodStroyer GërtkAún no hay calificaciones
- ABB - Manual Del UsuarioDocumento30 páginasABB - Manual Del UsuariorosasojedaAún no hay calificaciones
- Catalogo CFW10 PDFDocumento4 páginasCatalogo CFW10 PDFJorge Mercado NajeraAún no hay calificaciones
- NTC2416Documento16 páginasNTC2416olanolfAún no hay calificaciones
- VerilogDocumento101 páginasVerilogAlejandro Hernandez LopezAún no hay calificaciones
- VerilogDocumento57 páginasVerilogMariano DiazAún no hay calificaciones
- Práctica 525 Version Principiante Great DEMODocumento94 páginasPráctica 525 Version Principiante Great DEMORAUL MUÑOZAún no hay calificaciones
- Proteccion y Control de PotenciaDocumento62 páginasProteccion y Control de PotenciajhoseaguirreAún no hay calificaciones
- Arquitectura y Software - Racklatina PDFDocumento10 páginasArquitectura y Software - Racklatina PDFAriel PadillaAún no hay calificaciones
- Curso PLC BasicoDocumento63 páginasCurso PLC BasicoAlejandro Ramirez VazquezAún no hay calificaciones
- Techdoc Techdoc Print Page2Documento17 páginasTechdoc Techdoc Print Page2MIGUEL GRAU SEMINARIOAún no hay calificaciones
- Revista ACIEM 138 Pag 52 53 PDFDocumento2 páginasRevista ACIEM 138 Pag 52 53 PDFLuis angelAún no hay calificaciones
- Catalogo NexansDocumento96 páginasCatalogo NexansAdonis Alexander Sfakianakis MaurokefalidisAún no hay calificaciones
- Catalogo Hand Tools 2016 PDFDocumento307 páginasCatalogo Hand Tools 2016 PDFZabellzaroch Gerdenheim100% (1)
- Información y Estado de Los Controladores Logix5000Documento56 páginasInformación y Estado de Los Controladores Logix5000Erik Jacome0% (1)
- Abb Niessen Catálogo Tarifa 2014 Tomo Ii Automatización y ControlDocumento664 páginasAbb Niessen Catálogo Tarifa 2014 Tomo Ii Automatización y ControlVEMATELAún no hay calificaciones
- Contador VHDLDocumento8 páginasContador VHDLdrakon91Aún no hay calificaciones
- AVR Practica 2 - InterrupcionesDocumento6 páginasAVR Practica 2 - InterrupcionesLiiz SarabiaAún no hay calificaciones
- Verilog PracticasDocumento100 páginasVerilog Practicasivanvargas19100% (1)
- Clase 1 1 Diseño de Sistemas EmbebidosDocumento25 páginasClase 1 1 Diseño de Sistemas Embebidosdiego ricardo paez ardilaAún no hay calificaciones
- 202-HO RIO Manual-2 PDFDocumento63 páginas202-HO RIO Manual-2 PDFFelipeAlfonsoMuñozMorenoAún no hay calificaciones
- Normativa ArmonicosDocumento23 páginasNormativa ArmonicosfapmAún no hay calificaciones
- 8 Cinematica Robots MovilesDocumento52 páginas8 Cinematica Robots MovilesJavier Luna Victoria WenzelAún no hay calificaciones
- Rele Programable Clic 02 ControladorDocumento17 páginasRele Programable Clic 02 ControladorRafael LimnAún no hay calificaciones
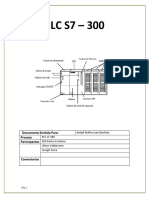
- Informe s7-300Documento9 páginasInforme s7-300Alejandro GonzalezAún no hay calificaciones
- Lenguajes VHDL y VerilogDocumento4 páginasLenguajes VHDL y Verilogpsycobrah100% (1)
- Software Quartus II y Funiones LógicasDocumento18 páginasSoftware Quartus II y Funiones Lógicasdaniel1994sandovalAún no hay calificaciones
- Trabajo I ParcialDocumento57 páginasTrabajo I ParcialIsaac OscanoaAún no hay calificaciones
- Comunicación S7-200 Y S7-1200 - COM - CPU - CPUDocumento13 páginasComunicación S7-200 Y S7-1200 - COM - CPU - CPUJohn Freddy Monroy JaimesAún no hay calificaciones
- Catalogo de Cursos Sigma Imecsa 2020Documento68 páginasCatalogo de Cursos Sigma Imecsa 2020EliasAún no hay calificaciones
- Bucles Dentro de Un Script en Intouch 10Documento5 páginasBucles Dentro de Un Script en Intouch 10Maxi SchremmelAún no hay calificaciones
- LABORATORIO Control PIDEDocumento18 páginasLABORATORIO Control PIDEJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Breve Guia ATEXDocumento35 páginasBreve Guia ATEXWilmer SusanoAún no hay calificaciones
- ¿Qué Es Un Lenguaje de Descripción de Hardware (HDL), Una GAL y y Un FPGA?Documento5 páginas¿Qué Es Un Lenguaje de Descripción de Hardware (HDL), Una GAL y y Un FPGA?Edgar ManríquezAún no hay calificaciones
- PLC dl06Documento13 páginasPLC dl06Haniel MartinezAún no hay calificaciones
- V1000Documento31 páginasV1000Vicpico PicosoAún no hay calificaciones
- Octave Manual PDFDocumento196 páginasOctave Manual PDFJennifer Cascales PerezAún no hay calificaciones
- Manual GoDocumento96 páginasManual GoJulio RangelAún no hay calificaciones
- Lenguaje CDocumento159 páginasLenguaje Cdante12345678Aún no hay calificaciones
- Curso LatexDocumento105 páginasCurso LatexRoger JachacolloAún no hay calificaciones
- ETSETB - Introducción A La Programación en CDocumento153 páginasETSETB - Introducción A La Programación en CHector TorresAún no hay calificaciones
- Clases PostgresqlDocumento113 páginasClases PostgresqlPedro Muñoz del Rio100% (1)
- MFM 0 FDocumento358 páginasMFM 0 FGlenn Robert Revolledo Vilchez0% (1)
- MercurialDocumento204 páginasMercurialClaudia NievesAún no hay calificaciones
- Programaci Ón y Métodos NuméricosDocumento304 páginasProgramaci Ón y Métodos NuméricosQB CristianAún no hay calificaciones
- Manual Programando Con RobotsDocumento106 páginasManual Programando Con RobotsIE Santa Ines De Guadalupe100% (1)
- RadicaciónDocumento12 páginasRadicaciónAdrián RiveroAún no hay calificaciones
- Guia 1 Notacion Cientifica 2012Documento3 páginasGuia 1 Notacion Cientifica 2012Amalia Maria Caicedo MercadoAún no hay calificaciones
- Previo 2 Diseño DigitalDocumento4 páginasPrevio 2 Diseño DigitalKevin SalujaAún no hay calificaciones
- Universidad DominicanaDocumento6 páginasUniversidad DominicanaLeison Moreno GuzmanAún no hay calificaciones
- CLC3 A 1P SolucionarioDocumento3 páginasCLC3 A 1P SolucionarioLion WinerAún no hay calificaciones
- Regla de Tres SimpleDocumento3 páginasRegla de Tres SimpleProfr Jorge A MinorAún no hay calificaciones
- 2a Taller Numeros Raices y LogaritmosDocumento8 páginas2a Taller Numeros Raices y LogaritmosMario Pizany CartesAún no hay calificaciones
- Luz Mamian00@usc Edu CoDocumento14 páginasLuz Mamian00@usc Edu CoLuz Derly Mamian AnaconaAún no hay calificaciones
- Semana 9 EstadisticaDocumento26 páginasSemana 9 EstadisticaYampier Marcañaupa ArotomaAún no hay calificaciones
- Matem-Ii Matanza2020 c02 PDocumento20 páginasMatem-Ii Matanza2020 c02 PDanna MelgarejoAún no hay calificaciones
- LogaritmosDocumento21 páginasLogaritmosMaribel Trejo MartelAún no hay calificaciones
- Math P4 G1 - Porcentajes, Una Aplicación de La ProporcionalidadDocumento9 páginasMath P4 G1 - Porcentajes, Una Aplicación de La ProporcionalidadTatiana RojasAún no hay calificaciones
- Sistema de Numeros Naturales y Enteros Suma RefinalDocumento11 páginasSistema de Numeros Naturales y Enteros Suma RefinalJhon Suma GamarraAún no hay calificaciones
- Tarea de MatemáticaDocumento8 páginasTarea de MatemáticaYariza Rosario MartinezAún no hay calificaciones
- Algebra 1°Documento43 páginasAlgebra 1°Cézhar Navarro PardavéAún no hay calificaciones
- Guia Aritmetica Septimo Segundo PeriodoDocumento16 páginasGuia Aritmetica Septimo Segundo Periodojesus mario arizaAún no hay calificaciones
- Cuadernillo 2º EES Nº 41Documento7 páginasCuadernillo 2º EES Nº 41Aida Matilde DominguezAún no hay calificaciones
- Electronica Digital Primer Parcial Juan Francisco de Leon Pivaral 2690128620Documento7 páginasElectronica Digital Primer Parcial Juan Francisco de Leon Pivaral 2690128620Juan De Leon PivaralAún no hay calificaciones
- Adicion de NúmerosDocumento4 páginasAdicion de NúmerosYuliana Beatriz Campos MantariAún no hay calificaciones
- Ac 201826037881Documento3 páginasAc 201826037881Liliana TarapuesAún no hay calificaciones
- 61809866-REFUERZO-OPERACIONES-COMBINADAS 6o Primaria PDFDocumento9 páginas61809866-REFUERZO-OPERACIONES-COMBINADAS 6o Primaria PDFMaria RiveroAún no hay calificaciones
- Sistema BinarioDocumento17 páginasSistema BinarioJohn EdrickAún no hay calificaciones
- Capitulo 2 EjerciciosDocumento26 páginasCapitulo 2 EjerciciosFernando Ibarra50% (2)
- Trab Colab GRUPO Calculo DiferencialDocumento24 páginasTrab Colab GRUPO Calculo DiferencialSi Solo DavidAún no hay calificaciones
- Capitulo 3-Diferenciacion PDFDocumento20 páginasCapitulo 3-Diferenciacion PDFDavid Junior Torres PinchiAún no hay calificaciones
- Matriz Compet. MatemáticaDocumento12 páginasMatriz Compet. MatemáticaJoyce ZapataAún no hay calificaciones
- Guia 07 - A - MatematicaDocumento16 páginasGuia 07 - A - MatematicaLuis Armando PandoAún no hay calificaciones
- Ficha Math Progresión ArtiméticaDocumento3 páginasFicha Math Progresión ArtiméticaMarino Tintaya GutièrrezAún no hay calificaciones
- Álgebra 3ro Sec - I Bim - TareaDocumento6 páginasÁlgebra 3ro Sec - I Bim - TareaRonald Richard Quiliche GalvezAún no hay calificaciones