También podría gustarte
- Evidencia 4 (De Producto) RAP1 - EV04 - Matriz LegalDocumento4 páginasEvidencia 4 (De Producto) RAP1 - EV04 - Matriz LegalHenry GomezAún no hay calificaciones
- AzureDocumento394 páginasAzureJon Diaz100% (1)
- EVALUACIONESDocumento82 páginasEVALUACIONESKaroll Castro100% (1)
- Fundamentos Contables - Cuadernos para La Enseñanza y Aprendizaje ContableDocumento203 páginasFundamentos Contables - Cuadernos para La Enseñanza y Aprendizaje ContableCARLOS FELIPE CHAVES CAMPOAún no hay calificaciones
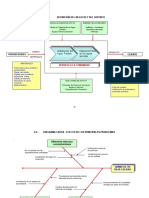
- 3.2. Causa - EfectoDocumento13 páginas3.2. Causa - EfectoJM MediavillaAún no hay calificaciones
- Centro Comercial VillacentroDocumento1 páginaCentro Comercial VillacentroAdriana BermudezAún no hay calificaciones
- Información Habilitacion TeleradiologiaDocumento5 páginasInformación Habilitacion Teleradiologiasistemas UmitAún no hay calificaciones
- Exposición A Patógenos en La SangreDocumento21 páginasExposición A Patógenos en La SangreMabe Mateo RosalesAún no hay calificaciones
- Prueba Excel ANALISTADocumento393 páginasPrueba Excel ANALISTAMeliss100% (1)
- 3.-Anexo IV - Modelo de CVDocumento4 páginas3.-Anexo IV - Modelo de CVAbba SIntAún no hay calificaciones
- La Metodologia de Matriz de LeopoldDocumento27 páginasLa Metodologia de Matriz de LeopoldPaul FloresAún no hay calificaciones
- DSM E1Documento5 páginasDSM E1Armando JuarezAún no hay calificaciones
- Lock Out Tag OutDocumento21 páginasLock Out Tag OutAlejandra Calle PachecoAún no hay calificaciones
- Organigrama MHCP 18-11-2021Documento2 páginasOrganigrama MHCP 18-11-2021Patarroyo AlejoAún no hay calificaciones
- Planeaacion Estrategica de TottoDocumento21 páginasPlaneaacion Estrategica de TottoMarcela Quesada100% (2)
- Identificacion Del Producto1Documento15 páginasIdentificacion Del Producto1Antonia Gallardo Colin100% (1)
- Resumen Separacion 8Documento4 páginasResumen Separacion 8Ana Maria FernandezAún no hay calificaciones
- Bomba de Lodo (Si)Documento8 páginasBomba de Lodo (Si)Rony Medina MedinaAún no hay calificaciones
- Solucion TallerDocumento2 páginasSolucion TallerangellyAún no hay calificaciones
- S4 Semana 7 Control InternoDocumento33 páginasS4 Semana 7 Control InternoGALARZA PANTA MARCOS ALONSOAún no hay calificaciones
- Educar en ValoresDocumento10 páginasEducar en ValoresKenny CarrascoAún no hay calificaciones
- Tesis Brom. Cappella Agostina 24-10-16Documento78 páginasTesis Brom. Cappella Agostina 24-10-16Lucas KomaszczukAún no hay calificaciones
- Funciones EnfermeriaDocumento4 páginasFunciones EnfermeriaMelchor MayAún no hay calificaciones
- Diagrama de Proceso Encurtido de PepinilloDocumento2 páginasDiagrama de Proceso Encurtido de PepinilloMila Gomez BadilloAún no hay calificaciones
- Principio de ParetoDocumento17 páginasPrincipio de ParetoEnoc SantosAún no hay calificaciones
- LEY #27783 - DescentralizacionDocumento33 páginasLEY #27783 - DescentralizacionFredy GutierrezAún no hay calificaciones
- Solicitud Factibilidad Enosa - Ampliación SDP y SDS - El GuineoDocumento2 páginasSolicitud Factibilidad Enosa - Ampliación SDP y SDS - El GuineoRichardAbantoRuizAún no hay calificaciones
- 2021 Recupercion 11 GradoDocumento4 páginas2021 Recupercion 11 GradoANGIE VALENTINA SILVA CORREAAún no hay calificaciones
- Menú de GraduaciónDocumento6 páginasMenú de Graduaciónmaritza romeroAún no hay calificaciones
- Caso MarriottDocumento35 páginasCaso MarriottFelipe Navarrete GonzalezAún no hay calificaciones