También podría gustarte
- ACTIVIDAD5P2Documento24 páginasACTIVIDAD5P2Gael BrAún no hay calificaciones
- Ejercicio 1 Examen Aplicaciones MatematicasDocumento8 páginasEjercicio 1 Examen Aplicaciones MatematicasDe La Paz Gallardo Daniel DamianAún no hay calificaciones
- Resolucion Guía 2Documento6 páginasResolucion Guía 2Jose Daniel Ruiz100% (1)
- P 5 - 6 L6 Sol, Dick ZambranoDocumento3 páginasP 5 - 6 L6 Sol, Dick ZambranoLuis ZambranoAún no hay calificaciones
- Ejercicios Fluidos ResueltosDocumento10 páginasEjercicios Fluidos ResueltosFrancisca MontalvoAún no hay calificaciones
- Cálculo de LC A Partir de Un Punto en Curva y PiDocumento1 páginaCálculo de LC A Partir de Un Punto en Curva y PiDavid HernándezAún no hay calificaciones
- Taller Semana 12Documento6 páginasTaller Semana 12paula mikhaela rodriguez patiñoAún no hay calificaciones
- Solución Taller Problemas de Aplicación IntegralesDocumento3 páginasSolución Taller Problemas de Aplicación IntegralesFelipe Andres BonillaAún no hay calificaciones
- Documento 1Documento11 páginasDocumento 1WILLY Condori NinaAún no hay calificaciones
- Ecuación Diferencial para Dos DepósitosDocumento5 páginasEcuación Diferencial para Dos DepósitosElvis Hancco QuitoAún no hay calificaciones
- Tarea5 Cap6 Funciones de VADocumento3 páginasTarea5 Cap6 Funciones de VAMacario Perz100% (4)
- TransformadaInversaLaplace2 ZillDocumento4 páginasTransformadaInversaLaplace2 ZillAlison MedinaAún no hay calificaciones
- Ejercicio 4Documento4 páginasEjercicio 4Verano TraidorAún no hay calificaciones
- Trabajo PC1 FisicaDocumento16 páginasTrabajo PC1 FisicaERICK BRANDON ANTHONY CARITA CUAREZAún no hay calificaciones
- Ejercicios Control de Procesos UltimoDocumento13 páginasEjercicios Control de Procesos UltimoHecardo SiuAún no hay calificaciones
- Sintonizacion PidDocumento2 páginasSintonizacion PidJosué SimónAún no hay calificaciones
- MicroeconomíaDocumento6 páginasMicroeconomíaMontserrat ÁlvarezAún no hay calificaciones
- TrabajoDocumento11 páginasTrabajoEdgard ChuraAún no hay calificaciones
- Taller 1 - Sistemas de BombeoDocumento4 páginasTaller 1 - Sistemas de Bombeocarlos sierraAún no hay calificaciones
- Tercera Práctica Calificada de Ecuaciones Diferenciales Ma-153Documento4 páginasTercera Práctica Calificada de Ecuaciones Diferenciales Ma-153Frank OreAún no hay calificaciones
- 17-24 Circuitos 2Documento3 páginas17-24 Circuitos 2jheisson kisimotoAún no hay calificaciones
- Trabajo Colaborativo Ecuaciones DiferencialesDocumento6 páginasTrabajo Colaborativo Ecuaciones DiferencialesElkin Bejarano OlayaAún no hay calificaciones
- Preparatorio 7 PDFDocumento6 páginasPreparatorio 7 PDFCris 97Aún no hay calificaciones
- Vibración de ResortesDocumento12 páginasVibración de Resorteslaura ximena alvarado vesgaAún no hay calificaciones
- Apunte de Clase Practica - Ecuaciones No LinealesDocumento18 páginasApunte de Clase Practica - Ecuaciones No LinealesSebastián BellucciAún no hay calificaciones
- Examen Final-Calculo IDocumento4 páginasExamen Final-Calculo IROMMEL AARON REYNAGA ALVARADOAún no hay calificaciones
- AnalisisDocumento20 páginasAnalisisKevin FigueroaAún no hay calificaciones
- Ecuaciones Diferenciales 2Documento8 páginasEcuaciones Diferenciales 2DanHiel LiZarazoAún no hay calificaciones
- Fun T Polos Ceros 21 22Documento23 páginasFun T Polos Ceros 21 22Ismael Aguilar MoralesAún no hay calificaciones
- Abr-Ecuaciones DiferencialesDocumento13 páginasAbr-Ecuaciones DiferencialesSORAYDA MARGARITA FERNANDEZ PATILLAAún no hay calificaciones
- Tarea 1Documento30 páginasTarea 1Luiggi Fernando Diaz AcostaAún no hay calificaciones
- Tarea Sem 14 EDOTaylor M4Documento8 páginasTarea Sem 14 EDOTaylor M4PAOLO CESAR ARIAS SANGAMAAún no hay calificaciones
- Filemd5182-2023-04-08 19-20-57Documento15 páginasFilemd5182-2023-04-08 19-20-57Fernando Arispe RamirezAún no hay calificaciones
- Solucionario Clase 11Documento3 páginasSolucionario Clase 11Sonia Perez AvilaAún no hay calificaciones
- Actividad CalculoDocumento4 páginasActividad CalculoRafaSilva100% (1)
- PC3 2020 1 DesarrolladaDocumento4 páginasPC3 2020 1 DesarrolladaKenyi AguilarAún no hay calificaciones
- Ecuaciones CuadraticasDocumento26 páginasEcuaciones CuadraticasFabrizio MedinaAún no hay calificaciones
- Practicono12 ResueltoDocumento5 páginasPracticono12 ResueltoMatías Sánchez RuízAún no hay calificaciones
- Calculo Parametros de La BombaDocumento7 páginasCalculo Parametros de La BombaKarol HoyosAún no hay calificaciones
- Diseño de Columna. José ZamorioDocumento7 páginasDiseño de Columna. José Zamoriozamorio.jose0207Aún no hay calificaciones
- Examen 1er Parcial ElectromagnetismoDocumento4 páginasExamen 1er Parcial ElectromagnetismoKev Loz100% (1)
- ColaborativoDocumento10 páginasColaborativoFelipe GomezAún no hay calificaciones
- Tema 2 EjerciciosDocumento2 páginasTema 2 EjerciciosDavid Chambilla ChoquecotaAún no hay calificaciones
- Tema 2 Ejercicios PDFDocumento2 páginasTema 2 Ejercicios PDFMarkos G. YanaParedesAún no hay calificaciones
- Tema 2 Ejercicios PDFDocumento2 páginasTema 2 Ejercicios PDFMarkos G. YanaParedesAún no hay calificaciones
- Taller de Ecuaciones Diferenciales Eje 03Documento9 páginasTaller de Ecuaciones Diferenciales Eje 03Luis Mora VelaAún no hay calificaciones
- Ejercicio 7.7 Levine FinalDocumento11 páginasEjercicio 7.7 Levine FinalAmbarAún no hay calificaciones
- Ejercicio de Hidrodinámica en TuberíasDocumento3 páginasEjercicio de Hidrodinámica en TuberíasMiguel Ángel GonzálezAún no hay calificaciones
- GFJFGDocumento8 páginasGFJFGBrahyan Contreras MesiasAún no hay calificaciones
- AP Limites y ContinuidadDocumento7 páginasAP Limites y ContinuidadJiancarlo O. HidalgoAún no hay calificaciones
- 4 Solucion de Ejercicos 4 y 5 PDFDocumento13 páginas4 Solucion de Ejercicos 4 y 5 PDFLeticia Gabriela Vite RamirezAún no hay calificaciones
- Soluc Prueba de Desarrollo 2Documento5 páginasSoluc Prueba de Desarrollo 2LEONOR ANDREA CONDORI FLORESAún no hay calificaciones
- Ejercicios de FluidosDocumento10 páginasEjercicios de FluidosAlonso Crisostomo OrtizAún no hay calificaciones
- Ejercicios Clase 5Documento3 páginasEjercicios Clase 5Hernán Herrera VelásquezAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias - DeberN°5 - Transformación de Laplace - Rivera Tapia Andrés JesúsDocumento7 páginasEcuaciones Diferenciales Ordinarias - DeberN°5 - Transformación de Laplace - Rivera Tapia Andrés JesúsPANDAAún no hay calificaciones
- Solución de 2º ParcialDocumento4 páginasSolución de 2º ParcialArlette LariosAún no hay calificaciones
- Integración Por Partes y SustituciónDocumento11 páginasIntegración Por Partes y SustituciónCristian AlarconAún no hay calificaciones
- 354 1075627828Documento14 páginas354 1075627828snaider gaitanAún no hay calificaciones
- Practica 7 PID Analogico Equipo#5Documento10 páginasPractica 7 PID Analogico Equipo#5Cristian ColínAún no hay calificaciones
- Presaberes Técnicas de InvestigaciónDocumento11 páginasPresaberes Técnicas de InvestigaciónMiguel Angel DeckersAún no hay calificaciones
- Estimulacion Temprana 6-1 2 MesesDocumento3 páginasEstimulacion Temprana 6-1 2 MesesKatherine lizeth Acosta RodasAún no hay calificaciones
- 1.2 Planeación de CHDocumento14 páginas1.2 Planeación de CHccpp04Aún no hay calificaciones
- Alteraciones de La Columna Vertebral en Las OsteocondrodisplasiasDocumento21 páginasAlteraciones de La Columna Vertebral en Las OsteocondrodisplasiasJhoana Yeverlyn Rodriguez RamirezAún no hay calificaciones
- Brazing Reference Spanish 2 1Documento24 páginasBrazing Reference Spanish 2 1Raron1Aún no hay calificaciones
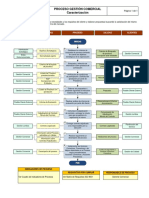
- Proceso Gestión ComercialDocumento1 páginaProceso Gestión ComercialSabrina Valdivia SalcedoAún no hay calificaciones
- ArgumentaciónDocumento12 páginasArgumentaciónKarina Torres DuránAún no hay calificaciones
- Clase 01 ProbabilidadesDocumento31 páginasClase 01 ProbabilidadesClauu Martinez PortalAún no hay calificaciones
- Tarea 6.1analisis de Diversas TeoriasDocumento2 páginasTarea 6.1analisis de Diversas TeoriasGAMER MODSAún no hay calificaciones
- Estudio HidrologicoDocumento55 páginasEstudio HidrologicoJoel Antonio EspirituAún no hay calificaciones
- Calidad Curso PDFDocumento21 páginasCalidad Curso PDFpawayankaAún no hay calificaciones
- TALLER No 01Documento2 páginasTALLER No 01IEFEBO100% (1)
- AlimentosDocumento11 páginasAlimentosIVAN ALEXANDER ORTIZ CABRERAAún no hay calificaciones
- Los Fenómenos Ondulatorios 9Documento3 páginasLos Fenómenos Ondulatorios 9VICTOR MANUEL CELY SANDOVALAún no hay calificaciones
- Libros Gratis en PDF para Aprender InglésDocumento7 páginasLibros Gratis en PDF para Aprender InglésR EstradaAún no hay calificaciones
- Normasicontecparadibujotecnico 130513105319 Phpapp02Documento30 páginasNormasicontecparadibujotecnico 130513105319 Phpapp02Miguel Angel Fonseca BelloAún no hay calificaciones
- Diagrama Bimanual HamburguesasDocumento9 páginasDiagrama Bimanual HamburguesasRenata Beatríz Castillo RuizAún no hay calificaciones
- Libro BioinformaticaDocumento167 páginasLibro BioinformaticaTorres M Alejandra100% (6)
- Generalidades MIPGDocumento8 páginasGeneralidades MIPGAUXCONTABLE CONSORCIO SOMIAún no hay calificaciones
- Tarea 2 - Tecnicas - de - ConteoDocumento31 páginasTarea 2 - Tecnicas - de - ConteoJulieth Tatiana HernándezAún no hay calificaciones
- Thomas HobbesDocumento10 páginasThomas HobbesJulissa NavarroAún no hay calificaciones
- Como Combinar Correspondencia en Word 2007 PDFDocumento2 páginasComo Combinar Correspondencia en Word 2007 PDFLatonyaAún no hay calificaciones
- El Metodo de Casos Como Estrategia de EnsenanzaDocumento17 páginasEl Metodo de Casos Como Estrategia de EnsenanzaYuri CruzAún no hay calificaciones
- Entre Vista SomozaDocumento7 páginasEntre Vista SomozaAlberto TaylorAún no hay calificaciones
- Teoria Fisca TerceroDocumento4 páginasTeoria Fisca TerceroBLNKBIANCHI0% (2)
- MUNADocumento50 páginasMUNAGLADYS INCHE ZUÑIGAAún no hay calificaciones
- Fis Semi1 2013-IDocumento4 páginasFis Semi1 2013-IrocckikeAún no hay calificaciones
- IBM - Wikipedia, La Enciclopedia LibreDocumento61 páginasIBM - Wikipedia, La Enciclopedia LibreOsmiu osAún no hay calificaciones
- Parcial 4Documento2 páginasParcial 4Jesse CookAún no hay calificaciones
- Revista Cuadernos de Rabat 31Documento63 páginasRevista Cuadernos de Rabat 31ladybird73Aún no hay calificaciones