También podría gustarte
- Clase 3Documento6 páginasClase 3Abisaí Sánchez AlegríaAún no hay calificaciones
- Guía Introductoria para Sensores de Posición - Rev - 1.0Documento15 páginasGuía Introductoria para Sensores de Posición - Rev - 1.0angel davidAún no hay calificaciones
- 2.2 Transductores de Posición y DesplazamientoDocumento8 páginas2.2 Transductores de Posición y DesplazamientoAbisaí Sánchez AlegríaAún no hay calificaciones
- Clase 2Documento3 páginasClase 2Abisaí Sánchez AlegríaAún no hay calificaciones
- 2.1 Conversión A-DDocumento5 páginas2.1 Conversión A-DAbisaí Sánchez AlegríaAún no hay calificaciones
- 2.1 Transductores de TemperaturaDocumento16 páginas2.1 Transductores de TemperaturaAbisaí Sánchez AlegríaAún no hay calificaciones
- Sensores de fuerza y par: tipos y aplicacionesDocumento9 páginasSensores de fuerza y par: tipos y aplicacionesAbisaí Sánchez AlegríaAún no hay calificaciones
- TEMA 2.1 Generación Números Al3Documento10 páginasTEMA 2.1 Generación Números Al3Abisaí Sánchez AlegríaAún no hay calificaciones
- Compensación de Adelanto, Atraso y AmbasDocumento44 páginasCompensación de Adelanto, Atraso y AmbasAndres SilvaAún no hay calificaciones
- Tema 2.4 Diagrama en RetrasoDocumento11 páginasTema 2.4 Diagrama en RetrasoAbisaí Sánchez AlegríaAún no hay calificaciones
- Ejercicio Compe AdelDocumento1 páginaEjercicio Compe AdelAbisaí Sánchez AlegríaAún no hay calificaciones
- Tema 2.1 IntroduccionDocumento7 páginasTema 2.1 IntroduccionAbisaí Sánchez AlegríaAún no hay calificaciones
- Termopares: efectos, tipos y aplicacionesDocumento4 páginasTermopares: efectos, tipos y aplicacionesfrankys200Aún no hay calificaciones
- TEMA 2.2 Pruebas EstadísticasDocumento9 páginasTEMA 2.2 Pruebas EstadísticasAbisaí Sánchez AlegríaAún no hay calificaciones
- Diseño de Alimentadores para Un Sistema Eléctrico en Baja Tensión PDFDocumento72 páginasDiseño de Alimentadores para Un Sistema Eléctrico en Baja Tensión PDFAbraham Perez100% (1)
- Tarea 2Documento1 páginaTarea 2Abisaí Sánchez AlegríaAún no hay calificaciones
- Ejercicio Compe AdelDocumento1 páginaEjercicio Compe AdelAbisaí Sánchez AlegríaAún no hay calificaciones
- Reticula Ingenieria Electrica IELE-2010-209 PDFDocumento1 páginaReticula Ingenieria Electrica IELE-2010-209 PDFLuis Felix 10Aún no hay calificaciones
- Norma iluminación centros trabajoDocumento13 páginasNorma iluminación centros trabajoTrebor HGAún no hay calificaciones
- Ejercicio Compe AtrDocumento1 páginaEjercicio Compe AtrAbisaí Sánchez AlegríaAún no hay calificaciones
- Practicas de Instalaciones EléctricasDocumento1 páginaPracticas de Instalaciones EléctricasAbisaí Sánchez AlegríaAún no hay calificaciones
- 28 CreenciasDocumento1 página28 CreenciasAbisaí Sánchez AlegríaAún no hay calificaciones
- Ejericio 1Documento1 páginaEjericio 1Abisaí Sánchez AlegríaAún no hay calificaciones
- Calculo Iluminacion - Ruizmolina1Documento13 páginasCalculo Iluminacion - Ruizmolina1Abisaí Sánchez AlegríaAún no hay calificaciones
- Calculo Iluminacion - Ruizmolina1Documento13 páginasCalculo Iluminacion - Ruizmolina1Abisaí Sánchez AlegríaAún no hay calificaciones
- Luminotecnia PDFDocumento10 páginasLuminotecnia PDFimherbyAún no hay calificaciones
- Diseño de Alimentadores para Un Sistema Eléctrico en Baja Tensión PDFDocumento72 páginasDiseño de Alimentadores para Un Sistema Eléctrico en Baja Tensión PDFAbraham Perez100% (1)
- Ejercicio TransDocumento1 páginaEjercicio TransAbisaí Sánchez AlegríaAún no hay calificaciones
- ZMP 1908881 P Par 16 50 36 4.6 W 2700K Gu10Documento4 páginasZMP 1908881 P Par 16 50 36 4.6 W 2700K Gu10Abisaí Sánchez AlegríaAún no hay calificaciones
- Unidad2 ElectromagnetismoDocumento19 páginasUnidad2 ElectromagnetismoAdriana escobar hernandezAún no hay calificaciones
- Tarea 3 PDFDocumento7 páginasTarea 3 PDFDaniel DominguezAún no hay calificaciones
- Conexiones MaquinasDocumento7 páginasConexiones MaquinasMarisol Medina100% (1)
- Lab 9 - Curva Caracterisitica de Regulación Generador SíncronoDocumento4 páginasLab 9 - Curva Caracterisitica de Regulación Generador SíncronoFrescoland dAún no hay calificaciones
- Generación eléctrica con gases de escapeDocumento24 páginasGeneración eléctrica con gases de escapeAnonymous 2OHdCmTKAún no hay calificaciones
- Taco MetroDocumento23 páginasTaco Metrosergio_choqqueAún no hay calificaciones
- Tipos de Generadores de Corriente ContinúaDocumento4 páginasTipos de Generadores de Corriente ContinúaLigaVicenteSuarezAún no hay calificaciones
- Resumen Electrotecnia FinalDocumento103 páginasResumen Electrotecnia FinalLadislao Alessandor LetonaiAún no hay calificaciones
- Puente de ImpedanciasDocumento6 páginasPuente de Impedanciasdamianl10Aún no hay calificaciones
- Pauta de Genereadores c30Documento16 páginasPauta de Genereadores c30Cesar AAún no hay calificaciones
- MÉTODO DE LOS KVA S EQUIVALENTES Cálculo de CortoCircuitosDocumento60 páginasMÉTODO DE LOS KVA S EQUIVALENTES Cálculo de CortoCircuitosCarlos Eduardo Gómez100% (4)
- Unidad 3 Maquinas SincronasDocumento32 páginasUnidad 3 Maquinas SincronasChololo Jr Bans67% (3)
- Catalogo Shell NaogerDocumento44 páginasCatalogo Shell NaogerNahum RodríguezAún no hay calificaciones
- Lab 02 Generador Sincrono FinalDocumento17 páginasLab 02 Generador Sincrono FinalKaren HuamanAún no hay calificaciones
- Circuitos Magneticos y PropiedadesDocumento3 páginasCircuitos Magneticos y PropiedadesAlejandro CasallasAún no hay calificaciones
- Generadores ElectricosDocumento62 páginasGeneradores ElectricosMarcoMarquezAún no hay calificaciones
- CAPÍTULO 2. Corriente ContinuaDocumento31 páginasCAPÍTULO 2. Corriente ContinuaLeonel Jordy PerezAún no hay calificaciones
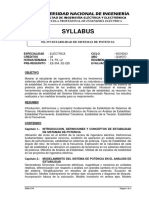
- 04 Ee-375 Estabilidad de Sistemas de Potencia - 2018Documento3 páginas04 Ee-375 Estabilidad de Sistemas de Potencia - 2018samuelAún no hay calificaciones
- Fisica Glosario de PalabraDocumento7 páginasFisica Glosario de PalabraEna Fernanda Ortega AguilarAún no hay calificaciones
- Avance 3 - Disco FaradayDocumento7 páginasAvance 3 - Disco FaradayCarlos DiazAún no hay calificaciones
- Protecciones eléctricas generadoresDocumento26 páginasProtecciones eléctricas generadoresOscar Rodriguez100% (3)
- Grupo electrógeno Caterpillar C18 PGBI 550 kVADocumento9 páginasGrupo electrógeno Caterpillar C18 PGBI 550 kVAAndresRealpe100% (2)
- Circuitos básicos y laboratorio de electrónica analógica y digitalDocumento5 páginasCircuitos básicos y laboratorio de electrónica analógica y digitalYuritza Arevalo0% (1)
- Ramon-Santos-Unidad 1 (Saber)Documento16 páginasRamon-Santos-Unidad 1 (Saber)EddySantosAún no hay calificaciones
- Alvarez Dominguez Ricardo Yael, Maquinas Electricas, EXAMEN UNIDAD 1Documento6 páginasAlvarez Dominguez Ricardo Yael, Maquinas Electricas, EXAMEN UNIDAD 1Ricardo Yael ÁlvarezAún no hay calificaciones
- Resumen 1 Julian IguavitaDocumento4 páginasResumen 1 Julian IguavitaFreddy Cuervo CamargoAún no hay calificaciones
- Usos de la energía eólica para generar energía en bajas potenciasDocumento27 páginasUsos de la energía eólica para generar energía en bajas potenciasHectorAún no hay calificaciones
- Control de potencia activa y frecuencia en sistemas eléctricosDocumento31 páginasControl de potencia activa y frecuencia en sistemas eléctricosVíctor Tello AguilarAún no hay calificaciones
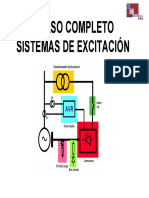
- Curso ExcitaciónDocumento84 páginasCurso ExcitaciónAutomation ServicesAún no hay calificaciones
- Sistemas de Excitación EstáticaDocumento8 páginasSistemas de Excitación EstáticaMauricio VelascoAún no hay calificaciones