También podría gustarte
- Informe Ensayo JominyDocumento3 páginasInforme Ensayo JominyErick SolanoAún no hay calificaciones
- Evolucion e Historia de La ProduccionDocumento18 páginasEvolucion e Historia de La ProduccionCarlos Fabres Ulloa40% (5)
- Cactáceas de MéxicoDocumento40 páginasCactáceas de MéxicoClaudioBertonatti100% (1)
- Investigacion IngenieraDocumento5 páginasInvestigacion IngenieraErick SolanoAún no hay calificaciones
- Parte 2Documento24 páginasParte 2Erick SolanoAún no hay calificaciones
- Solano Erick SN ExposicionDocumento13 páginasSolano Erick SN ExposicionErick SolanoAún no hay calificaciones
- Trabajo Preparatorio GuiaV Solano ErickDocumento3 páginasTrabajo Preparatorio GuiaV Solano ErickErick SolanoAún no hay calificaciones
- Trabajo Preparatorio GuiaL3 Solano ErickDocumento6 páginasTrabajo Preparatorio GuiaL3 Solano ErickErick SolanoAún no hay calificaciones
- Crucigrama MetrologíaDocumento2 páginasCrucigrama MetrologíaErick SolanoAún no hay calificaciones
- Tarea 1Documento2 páginasTarea 1Erick SolanoAún no hay calificaciones
- Elementos de La MusicaDocumento16 páginasElementos de La MusicaErick SolanoAún no hay calificaciones
- Instrumentos SísmicosDocumento10 páginasInstrumentos SísmicosErick SolanoAún no hay calificaciones
- Amortiguamiento de Coulomb e HistéricoDocumento12 páginasAmortiguamiento de Coulomb e HistéricoErick SolanoAún no hay calificaciones
- El Rol Dual de Ser Líder y SeguidorDocumento5 páginasEl Rol Dual de Ser Líder y SeguidorErick SolanoAún no hay calificaciones
- Psicologia Del MexicanoDocumento1 páginaPsicologia Del MexicanoSelene Guadalupe Arias RayoAún no hay calificaciones
- Dosis UnitariaDocumento10 páginasDosis UnitariaRafael CaraballoAún no hay calificaciones
- EVA Trasptema9 PDFDocumento17 páginasEVA Trasptema9 PDFValeria S HernándezAún no hay calificaciones
- Tema10 PDFDocumento9 páginasTema10 PDFMILLER APONTEAún no hay calificaciones
- PETS (Agua)Documento12 páginasPETS (Agua)Yanira Ruiz RiosAún no hay calificaciones
- Investigación de Mercado 1 (Módulo 1)Documento4 páginasInvestigación de Mercado 1 (Módulo 1)dangerluvsAún no hay calificaciones
- Fichas Tecnicas PDFDocumento23 páginasFichas Tecnicas PDFIsabel MendozaAún no hay calificaciones
- Higiene PosturalDocumento1 páginaHigiene PosturalJuan Pablo GutierrezAún no hay calificaciones
- Hoja de Caracteristicas de Un DiodoDocumento11 páginasHoja de Caracteristicas de Un DiodoRamon pujolsAún no hay calificaciones
- 02 - Informe Resistencia Al FuegoDocumento4 páginas02 - Informe Resistencia Al Fuegojose luis molina donosoAún no hay calificaciones
- CV Lupis Actualizado NUEVO Septiembre 2023Documento5 páginasCV Lupis Actualizado NUEVO Septiembre 2023ceronlupita316Aún no hay calificaciones
- Consulta de La Brujula, Planimetria ADocumento6 páginasConsulta de La Brujula, Planimetria APalermo AnchundiaAún no hay calificaciones
- 5 AsqlDocumento36 páginas5 AsqlAldehuarteMextliAún no hay calificaciones
- Estadistica DescriptivaDocumento33 páginasEstadistica DescriptivaMarcelo RojasAún no hay calificaciones
- Ciclo de Dos TiemposDocumento3 páginasCiclo de Dos TiemposBetho CoronadoAún no hay calificaciones
- Vi Ciclo Eda 01 - Actividad 01Documento4 páginasVi Ciclo Eda 01 - Actividad 01Sara Patricia Hernández ContrerasAún no hay calificaciones
- Planeta ExtrasolarDocumento30 páginasPlaneta ExtrasolarCarlos Isaac Godoy CoreaAún no hay calificaciones
- Ensayo CosmovisiónDocumento6 páginasEnsayo CosmovisiónJadid ArizAún no hay calificaciones
- Plan Ambiental #4600073217 REVISION 1Documento111 páginasPlan Ambiental #4600073217 REVISION 1Jhonny Adolfo Fersaca Garces100% (1)
- Victor Guerra - El Rito Frances. Historia, Reflexiones y DesarolloDocumento414 páginasVictor Guerra - El Rito Frances. Historia, Reflexiones y DesarolloAndrés ABPlusAún no hay calificaciones
- Envasadora de Vinos en BotellaDocumento15 páginasEnvasadora de Vinos en BotellaDaniela Lazo ToledoAún no hay calificaciones
- Resumen Del Libro 'La Verdad Sobre La Dirección de Personas'Documento24 páginasResumen Del Libro 'La Verdad Sobre La Dirección de Personas'Azael GzzAún no hay calificaciones
- Calculos y Teoria de Circuitos Modulo IIIDocumento14 páginasCalculos y Teoria de Circuitos Modulo IIICarlos CallpaAún no hay calificaciones
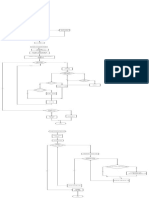
- Diagrama de FlujoDocumento1 páginaDiagrama de FlujoPaola AmayaAún no hay calificaciones
- Versión 2Documento6 páginasVersión 2Norlan DiazAún no hay calificaciones
- Universidad Nacional de HuancavelicaDocumento36 páginasUniversidad Nacional de Huancavelicagaby181107100% (1)
- Examen Ingenieria Sismo ResistenteDocumento8 páginasExamen Ingenieria Sismo ResistenteVíctor Vásquez BordaAún no hay calificaciones
- PLAN DE AREA DE ETICA Institución Educativa Juan Hurtado Etica 2024 Actualizaciones para El CuartoDocumento40 páginasPLAN DE AREA DE ETICA Institución Educativa Juan Hurtado Etica 2024 Actualizaciones para El CuartoWilson Henry Marin SierraAún no hay calificaciones