También podría gustarte
- 2 Sistemas FrigorificosDocumento226 páginas2 Sistemas FrigorificosjswampAún no hay calificaciones
- CV LeonardoDocumento4 páginasCV LeonardoositorxAún no hay calificaciones
- 2.definiciones de Aire AcondicionadoDocumento4 páginas2.definiciones de Aire AcondicionadofaustoAún no hay calificaciones
- Control de Calidad Del Sistema DrywallDocumento16 páginasControl de Calidad Del Sistema DrywallCarlos Cosi MamaniAún no hay calificaciones
- Análisis de La Coordinación de Protecciones en Centrales EléctricasDocumento41 páginasAnálisis de La Coordinación de Protecciones en Centrales Eléctricascesarchilet100% (1)
- TO Automatizacion Monitorizacion NuriaDocumento33 páginasTO Automatizacion Monitorizacion NuriaNuria Hernández González100% (2)
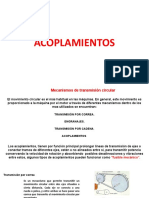
- Acoplamientos ADocumento44 páginasAcoplamientos AfaustoAún no hay calificaciones
- Diferencias Entre Un Hombre y Una Mujer Que Se Electrocuten Con Una Línea de 110V ACDocumento2 páginasDiferencias Entre Un Hombre y Una Mujer Que Se Electrocuten Con Una Línea de 110V ACfaustoAún no hay calificaciones
- Transportadores BDocumento17 páginasTransportadores BfaustoAún no hay calificaciones
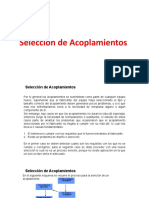
- Seleccion de AcoplamientosDocumento33 páginasSeleccion de AcoplamientosfaustoAún no hay calificaciones
- Alineacion de AcoplamientosDocumento19 páginasAlineacion de AcoplamientosfaustoAún no hay calificaciones
- Ejercicios 1 MecanismosDocumento9 páginasEjercicios 1 MecanismosfaustoAún no hay calificaciones
- 000.-Repaso de Magnitudes y EjemplosDocumento57 páginas000.-Repaso de Magnitudes y EjemplosfaustoAún no hay calificaciones
- Norma Endesa Cc. Expulsi N Cut Out Hasta 36 Kv. 1Documento17 páginasNorma Endesa Cc. Expulsi N Cut Out Hasta 36 Kv. 1faustoAún no hay calificaciones
- Circuito ResonanteDocumento2 páginasCircuito ResonantefaustoAún no hay calificaciones
- Armonicos en Comunicaciones PDFDocumento37 páginasArmonicos en Comunicaciones PDFfaustoAún no hay calificaciones
- Sintetizadores MagnéticosDocumento1 páginaSintetizadores MagnéticosfaustoAún no hay calificaciones
- Modulador Transistorizado en AMDocumento40 páginasModulador Transistorizado en AMCeCy UMAún no hay calificaciones
- Catalogo Timsun 2018Documento12 páginasCatalogo Timsun 2018Omar PiedraAún no hay calificaciones
- Semana 4.1. Planeamiento de Capacidad.Documento36 páginasSemana 4.1. Planeamiento de Capacidad.Carysel XinitaAún no hay calificaciones
- Codigo de Etica de Los Ingenieros en Tecnologias de La InformacionDocumento6 páginasCodigo de Etica de Los Ingenieros en Tecnologias de La InformacionCésar VarelasAún no hay calificaciones
- Ptocnx 3463078Documento5 páginasPtocnx 3463078Luis Rufino Prada CerroAún no hay calificaciones
- La Ciudad Dibujada Texto PDFDocumento48 páginasLa Ciudad Dibujada Texto PDFcarlos avilaAún no hay calificaciones
- Trazo y ReplanteoDocumento10 páginasTrazo y ReplanteoMario Nina AlmanzaAún no hay calificaciones
- Inks CapeDocumento3 páginasInks CapeMarceloAvilaCruz100% (1)
- 2019-Turquia-Alba Sin Ref-PublishedArticle - Compressed (2) EsDocumento24 páginas2019-Turquia-Alba Sin Ref-PublishedArticle - Compressed (2) Esa20234404Aún no hay calificaciones
- ASCAMM - Desarrollo y Estudios de Moldes de PlásticoDocumento127 páginasASCAMM - Desarrollo y Estudios de Moldes de PlásticoJosep BadiaAún no hay calificaciones
- Gtc138 Pirotecnia Guia Seguridad de FabricaciónDocumento9 páginasGtc138 Pirotecnia Guia Seguridad de Fabricaciónnilton cardonaAún no hay calificaciones
- Robótica Aspectos PracticosDocumento20 páginasRobótica Aspectos PracticosJusto JuradoAún no hay calificaciones
- 209 PC 2018-1Documento19 páginas209 PC 2018-1Rainiero CastañedaAún no hay calificaciones
- ALIVIANEROSDocumento23 páginasALIVIANEROSCorali Apeategui MendozaAún no hay calificaciones
- Introducción Al Lenguaje de Programacion Batch MS-DOSDocumento2 páginasIntroducción Al Lenguaje de Programacion Batch MS-DOSJack SesentayTres0% (1)
- Informe MaterialesDocumento5 páginasInforme MaterialesabelvaspAún no hay calificaciones
- Catálogo DX-DXS EspanholDocumento16 páginasCatálogo DX-DXS Espanholjf2003Aún no hay calificaciones
- 01 - Sistema de Colas Multi-Canal M M K - Rev - HDCDocumento3 páginas01 - Sistema de Colas Multi-Canal M M K - Rev - HDCJey CortesAún no hay calificaciones
- Tecnico Salesiano Juan PazminoDocumento0 páginasTecnico Salesiano Juan PazminoManuel GuiracochaAún no hay calificaciones
- Tipos de BuzonesDocumento11 páginasTipos de BuzonesCristiang Franko ColnillosAún no hay calificaciones
- Practica 3Documento8 páginasPractica 3Jose Daniel Ballestero MontielAún no hay calificaciones
- Chapter 4Documento39 páginasChapter 4jeangapontAún no hay calificaciones
- Ficha FTRDocumento2 páginasFicha FTRovanegasm100% (1)
- Fts Futbol SalaDocumento35 páginasFts Futbol SalaMario Delgado AlcaldeAún no hay calificaciones
- Informe-N° 002 - ConsistenciaDocumento6 páginasInforme-N° 002 - ConsistenciaLuis PalzevAún no hay calificaciones