También podría gustarte
- Ast 05 Instalacion de Aisladores y AccesoriosDocumento4 páginasAst 05 Instalacion de Aisladores y AccesoriosIván DasimuAún no hay calificaciones
- Pte02. Conexion de Interruptor de PotenciaDocumento9 páginasPte02. Conexion de Interruptor de PotenciaIván DasimuAún no hay calificaciones
- Ast 02 Montaje SabDocumento5 páginasAst 02 Montaje SabDANTE SIPION MUÑOZAún no hay calificaciones
- Pte10. Cajas DerivadasDocumento8 páginasPte10. Cajas DerivadasIván DasimuAún no hay calificaciones
- Ast 06 Tendido y Puesta en Flecha de ConductoresDocumento4 páginasAst 06 Tendido y Puesta en Flecha de ConductoresIván DasimuAún no hay calificaciones
- Pte06. Procedimiento Prevencion Covid-19Documento3 páginasPte06. Procedimiento Prevencion Covid-19Iván DasimuAún no hay calificaciones
- Cronograma Actividades Red PrimariaDocumento1 páginaCronograma Actividades Red PrimariaIván DasimuAún no hay calificaciones
- Ast 02 Apertura y Cierre de HoyosDocumento12 páginasAst 02 Apertura y Cierre de HoyosDANTE SIPION MUÑOZAún no hay calificaciones
- Ast 04 Instalacion de PatDocumento5 páginasAst 04 Instalacion de PatIván DasimuAún no hay calificaciones
- Monodestilador 2004 GFLDocumento2 páginasMonodestilador 2004 GFLIván Dasimu100% (1)
- Ast 01 Traslado de Materiales y EquiposDocumento6 páginasAst 01 Traslado de Materiales y EquiposDANTE SIPION MUÑOZAún no hay calificaciones
- Caso Ejemplo - Trabajo 01 - EditadoDocumento8 páginasCaso Ejemplo - Trabajo 01 - EditadoIván DasimuAún no hay calificaciones
- Ast 03 Izaje de Postes y CimentacionDocumento5 páginasAst 03 Izaje de Postes y CimentacionDANTE SIPION MUÑOZ100% (1)
- Carta Solicitando Reduccion de Pension Rev02Documento8 páginasCarta Solicitando Reduccion de Pension Rev02Iván DasimuAún no hay calificaciones
- Procedimiento de Montaje de EstructurasDocumento8 páginasProcedimiento de Montaje de EstructurasIván DasimuAún no hay calificaciones
- Impulso y Cantidad de MovimientoDocumento21 páginasImpulso y Cantidad de MovimientoIván DasimuAún no hay calificaciones
- Sistemas de Conservación de Cantidad de MovimientoDocumento16 páginasSistemas de Conservación de Cantidad de MovimientoIván DasimuAún no hay calificaciones
- Ejercicios de FlexiónDocumento7 páginasEjercicios de FlexiónIván DasimuAún no hay calificaciones
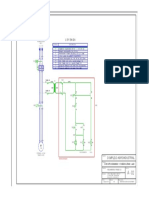
- Plano Electrico 0.37 KWDocumento1 páginaPlano Electrico 0.37 KWIván DasimuAún no hay calificaciones
- Principios de CinematicaDocumento18 páginasPrincipios de CinematicaIván DasimuAún no hay calificaciones
- Modelamiento y Simulacion de Micro Redes 2 Jorge Mirez - PPSXDocumento23 páginasModelamiento y Simulacion de Micro Redes 2 Jorge Mirez - PPSXIván DasimuAún no hay calificaciones
- Modelamiento y Simulacion de Micro Redes 2 Jorge Mirez - PPSXDocumento23 páginasModelamiento y Simulacion de Micro Redes 2 Jorge Mirez - PPSXIván DasimuAún no hay calificaciones
- El Estado Del ArteDocumento3 páginasEl Estado Del ArteIván DasimuAún no hay calificaciones
- Movimiento de Un Cuerpo Fijo Alrededor de Un EjeDocumento16 páginasMovimiento de Un Cuerpo Fijo Alrededor de Un EjeIván DasimuAún no hay calificaciones
- Adaptabilidad ArqDocumento41 páginasAdaptabilidad ArqIván DasimuAún no hay calificaciones
- LAB 01 - Velocidad de Una PartículaDocumento17 páginasLAB 01 - Velocidad de Una PartículaIván DasimuAún no hay calificaciones
- Introducción Leyes de La DinámicaDocumento22 páginasIntroducción Leyes de La DinámicaIván DasimuAún no hay calificaciones
- Elementos de TransmicionDocumento44 páginasElementos de TransmicionRicardo Farroñay Juarez100% (3)
- MDUSATDocumento2 páginasMDUSATIván DasimuAún no hay calificaciones
- Isx 400 4017851 01Documento1 páginaIsx 400 4017851 01emmanuel100% (1)
- Ensayo-Cambio SocialDocumento7 páginasEnsayo-Cambio SocialJennifer Garcia SosaAún no hay calificaciones
- Promociones AT&T Premium Smartphones A 24 MesesDocumento7 páginasPromociones AT&T Premium Smartphones A 24 MesesKarla NúñezAún no hay calificaciones
- CFITD AF 2o SecundariaDocumento96 páginasCFITD AF 2o SecundariaUlises Campos QuezadaAún no hay calificaciones
- Propiedades Sensoriales de Los MaterialesDocumento11 páginasPropiedades Sensoriales de Los MaterialesanahibubuAún no hay calificaciones
- Absorcion SO3Documento4 páginasAbsorcion SO3danielaAún no hay calificaciones
- Variable EstadísticaDocumento4 páginasVariable EstadísticaGabriel RomeroAún no hay calificaciones
- Silabo de Estrategias para Trabajar Unidocentes y Multigrado1Documento7 páginasSilabo de Estrategias para Trabajar Unidocentes y Multigrado1lizethAún no hay calificaciones
- 1.4. Números de Oxidación - PDFDocumento4 páginas1.4. Números de Oxidación - PDFFreddy AbarulloAún no hay calificaciones
- Cambios de La Materia para Quinto Grado de PrimariaDocumento6 páginasCambios de La Materia para Quinto Grado de Primarialelly fernandezAún no hay calificaciones
- Semiología de Las Afasias - Modelo NPS Lenguaje 2021Documento39 páginasSemiología de Las Afasias - Modelo NPS Lenguaje 2021Carlos esteban Arriagada MirandaAún no hay calificaciones
- Uso Del PHET - Predicciones para Estudiar La 2da Ley de Newton - Actividad Individual Segundo BGUDocumento3 páginasUso Del PHET - Predicciones para Estudiar La 2da Ley de Newton - Actividad Individual Segundo BGUDome GarciaAún no hay calificaciones
- Guia de Arrendamiento Sunat Rellenable PDFDocumento1 páginaGuia de Arrendamiento Sunat Rellenable PDFDavid Rosales Ramirez0% (1)
- WBS 3Documento1 páginaWBS 3pedroramirez22Aún no hay calificaciones
- Informe 3 CompresionDocumento4 páginasInforme 3 CompresionLuis Silva100% (1)
- Toolkit I+E N2 - VFDocumento37 páginasToolkit I+E N2 - VFCarlos Moraga Copier100% (2)
- Análisis No Lineal y Elementos Finitos NIVDocumento20 páginasAnálisis No Lineal y Elementos Finitos NIVLUIS FELIPE RUMALDO CASTILLOAún no hay calificaciones
- XHTML1Documento27 páginasXHTML1Juan ArteagaAún no hay calificaciones
- FDS AntiespumanteDocumento11 páginasFDS AntiespumanteJulian Mora AntivarAún no hay calificaciones
- Problema Rosa ResueltoDocumento3 páginasProblema Rosa ResueltoAna María Dávila GarcíaAún no hay calificaciones
- Unidad 1.1 - Función Cuadrática - E1Documento22 páginasUnidad 1.1 - Función Cuadrática - E1Maria SugoiAún no hay calificaciones
- Mate IiDocumento6 páginasMate IiJefferzon Oswald Aguilar CondoriAún no hay calificaciones
- Trabajo de Campo4.4Documento4 páginasTrabajo de Campo4.4Noemy Rojas0% (1)
- Pensamiento Simple Pensamiento ComplejoDocumento21 páginasPensamiento Simple Pensamiento Complejoconvenio2estadisticaAún no hay calificaciones
- Resumen 6.1,6.2,6.3,6.4...Documento3 páginasResumen 6.1,6.2,6.3,6.4...Katerine BonillaAún no hay calificaciones
- Separata Autocad2006 - Nivel IDocumento72 páginasSeparata Autocad2006 - Nivel IELAMAUTAREALAún no hay calificaciones
- Ausencia y DesapariciónDocumento7 páginasAusencia y DesapariciónAlejandro Ramírez DíazAún no hay calificaciones
- Evaluación SábadoDocumento3 páginasEvaluación SábadomonchiAún no hay calificaciones
- TEMA7. La Educación Primitiva PDFDocumento24 páginasTEMA7. La Educación Primitiva PDFAdel Farouk Vargas Espinosa-Efferett50% (2)
- Psicología, Materialismo e Idealismo.Documento48 páginasPsicología, Materialismo e Idealismo.CristinaSin100% (1)