También podría gustarte
- Lab 1 DSPDocumento16 páginasLab 1 DSPTopix0496Aún no hay calificaciones
- Conversión Digital - Analógica DigitalDocumento39 páginasConversión Digital - Analógica DigitalChristian Martínez100% (1)
- Muestreo de Señales y Conversión Analógico Digital - DSP (2018-03)Documento36 páginasMuestreo de Señales y Conversión Analógico Digital - DSP (2018-03)Alba RamirezAún no hay calificaciones
- Análisis de Señales Discretas en El TiempoDocumento26 páginasAnálisis de Señales Discretas en El TiempoChristian RománAún no hay calificaciones
- Practica 1Documento7 páginasPractica 1Wilmar Alexis Ruiz AldanaAún no hay calificaciones
- Variable Discretas SeñalesDocumento39 páginasVariable Discretas SeñalesRonny Díaz LópezAún no hay calificaciones
- GRUPO 299004 4 Paso2Documento18 páginasGRUPO 299004 4 Paso2Carlos CubidesAún no hay calificaciones
- 0111 - ExamenDocumento4 páginas0111 - ExamenJosue Israel MendozaAún no hay calificaciones
- Teoria de Comunicacion IIDocumento23 páginasTeoria de Comunicacion IINicolas Querebalu TrellesAún no hay calificaciones
- Ingenieria MecatronicaDocumento9 páginasIngenieria Mecatronicahv john (JOHN)Aún no hay calificaciones
- Circuit OsDocumento23 páginasCircuit OsnicolasAún no hay calificaciones
- Conversor Digital Analogo: Resumen - en El Presente Informe Se Expondrá La PrácticaDocumento4 páginasConversor Digital Analogo: Resumen - en El Presente Informe Se Expondrá La PrácticaLuis ReyAún no hay calificaciones
- Miercoles1-Fundamentos de Proteccion DigitalDocumento24 páginasMiercoles1-Fundamentos de Proteccion DigitalRudyJesusCapaIlizarbeAún no hay calificaciones
- Tarea 2 - Grupo 3 - Fredy - PertuzDocumento7 páginasTarea 2 - Grupo 3 - Fredy - Pertuzfredy pertuzAún no hay calificaciones
- Laboratorio N°01 - Sistemas de Control Digital - 90GDocumento4 páginasLaboratorio N°01 - Sistemas de Control Digital - 90Gjames chavezAún no hay calificaciones
- Microondas 2Documento3 páginasMicroondas 2Cristian FajardoAún no hay calificaciones
- Laboratorio 1 Procesamiento Digital de SenalesDocumento11 páginasLaboratorio 1 Procesamiento Digital de SenalesAle RQAún no hay calificaciones
- INFORME Conversion Analoga DigitalDocumento6 páginasINFORME Conversion Analoga DigitalMiriam YovisAún no hay calificaciones
- Felipe Leon Grupo40 Tarea2Documento7 páginasFelipe Leon Grupo40 Tarea2AndresFelipeLeonAún no hay calificaciones
- Tarea 2 - Cristiam PuertoDocumento9 páginasTarea 2 - Cristiam PuertocristiamotaloraAún no hay calificaciones
- PCM1 1Documento31 páginasPCM1 1Luis GilAún no hay calificaciones
- Señales y SistemasDocumento30 páginasSeñales y SistemasIvan AlexandrovAún no hay calificaciones
- Proceso de Muestreo de Una Señal PDFDocumento5 páginasProceso de Muestreo de Una Señal PDF12ingridAún no hay calificaciones
- Clase 12023Documento26 páginasClase 12023GEYSON EDDU GUERRERO LAURENTEAún no hay calificaciones
- Lectura02 - Muestreo y Cuantización Part-ADocumento57 páginasLectura02 - Muestreo y Cuantización Part-ALuis Javier Morales-MendozaAún no hay calificaciones
- Digital AnalógicoDocumento35 páginasDigital AnalógicoKerlly HolaAún no hay calificaciones
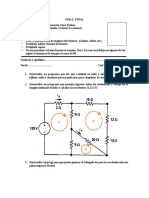
- Solucion 1er ParcialDocumento3 páginasSolucion 1er ParcialRudy Fabrizio Gandarillas YujraAún no hay calificaciones
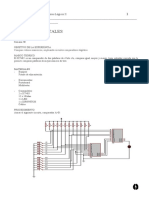
- Laboratorio 1 Compuertas LogicasDocumento16 páginasLaboratorio 1 Compuertas LogicaslizetteAún no hay calificaciones
- Taller de Señales en OsciloscopioDocumento6 páginasTaller de Señales en OsciloscopioJoHaN ESPOCITOAún no hay calificaciones
- Ensayo CadDocumento7 páginasEnsayo CadCesar R Patiño YáñezAún no hay calificaciones
- Taller de Señales en Osciloscopio TriangularesDocumento6 páginasTaller de Señales en Osciloscopio TriangularesJoHaN ESPOCITOAún no hay calificaciones
- Teoria Introductoria PDSDocumento21 páginasTeoria Introductoria PDSAlexander Choquenaira FlorezAún no hay calificaciones
- TallerDocumento30 páginasTallerCamila Gomez Aldana100% (1)
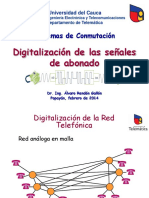
- DigitalizaciónDocumento54 páginasDigitalizaciónGHERALDINE SALAZAR LASSOAún no hay calificaciones
- Laboratorio 1 Compuertas LogicasDocumento16 páginasLaboratorio 1 Compuertas LogicasAlvaro Javier Moran CoralAún no hay calificaciones
- Conversión Analógico DigitalDocumento26 páginasConversión Analógico DigitalAlejandro PalaciosAún no hay calificaciones
- Muestreo SenalesDocumento8 páginasMuestreo SenalesMilena RodriguezAún no hay calificaciones
- Dorluys Perea Grupo 29 Tarea 2Documento10 páginasDorluys Perea Grupo 29 Tarea 2Dorluys Evans Perea HernandezAún no hay calificaciones
- Modulador y Demodulador PCMDocumento9 páginasModulador y Demodulador PCMErick MachadoAún no hay calificaciones
- Qué Es Una Señal DiscretaDocumento11 páginasQué Es Una Señal Discretalina maria medina velezAún no hay calificaciones
- Informe ConversoresDocumento4 páginasInforme ConversoresJennifer C. FonsecaAún no hay calificaciones
- Sistemas y Señales: Dr. Rogerio Enriquez CalderaDocumento21 páginasSistemas y Señales: Dr. Rogerio Enriquez CalderaSpark TronicsAún no hay calificaciones
- Intro ProcesamientoDocumento81 páginasIntro ProcesamientoRicardo CondeAún no hay calificaciones
- Cuestionario ADCDocumento4 páginasCuestionario ADCAron Castillo TurpoAún no hay calificaciones
- 2020 Parte1 PDSDocumento38 páginas2020 Parte1 PDSjuanAún no hay calificaciones
- Sena LesDocumento56 páginasSena LesanaAún no hay calificaciones
- Examen Nº1 Sicodii-ADocumento5 páginasExamen Nº1 Sicodii-AJ. BravoAún no hay calificaciones
- Laboratorio 2 - SeñalesDocumento8 páginasLaboratorio 2 - SeñalesxvidAún no hay calificaciones
- Comunicaciones Digitales ApuntesDocumento192 páginasComunicaciones Digitales Apuntessebastian nasiAún no hay calificaciones
- Audio 3Documento70 páginasAudio 3Diego MedinaAún no hay calificaciones
- Sistema de Control Digital Capitulo1Documento13 páginasSistema de Control Digital Capitulo1Jose Ignacio Gonzalez BeltramoAún no hay calificaciones
- Introduccion A La Electronica Analogica y DigitalDocumento26 páginasIntroduccion A La Electronica Analogica y DigitalRicardo Camino Del VillarAún no hay calificaciones
- Plantilla RateDocumento6 páginasPlantilla RateAndresFelipeLeonAún no hay calificaciones
- Transformada Z Aplicada A La Ingenieria ElectronicaDocumento37 páginasTransformada Z Aplicada A La Ingenieria ElectronicaalexAún no hay calificaciones
- 4 Jerarquía PDHDocumento28 páginas4 Jerarquía PDHEvita TipantuñaAún no hay calificaciones
- PPloT Sesión 1 Señales Analógicas y DigitalesDocumento15 páginasPPloT Sesión 1 Señales Analógicas y Digitalespablo navarrteAún no hay calificaciones
- Recepción y distribución de señales de radiodifusión. ELES0108De EverandRecepción y distribución de señales de radiodifusión. ELES0108Aún no hay calificaciones
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Semana 7Documento21 páginasSemana 7Julio CesarAún no hay calificaciones
- Sem 7 - Multimetro - FinalDocumento46 páginasSem 7 - Multimetro - FinalJulio CesarAún no hay calificaciones
- Semana 5-1Documento15 páginasSemana 5-1Julio CesarAún no hay calificaciones
- SEM 9 Señales Analogicas NewDocumento32 páginasSEM 9 Señales Analogicas NewJulio CesarAún no hay calificaciones
- Temporizador Basado en Ci 555Documento23 páginasTemporizador Basado en Ci 555Julio CesarAún no hay calificaciones
- REGLAMENTO - Categoria Por EdadDocumento34 páginasREGLAMENTO - Categoria Por EdadJulio CesarAún no hay calificaciones
- Grafcet (Fb1) : Totally Integrated Automation PortalDocumento13 páginasGrafcet (Fb1) : Totally Integrated Automation PortalJulio CesarAún no hay calificaciones
- S5B - Comparadores Lógicos IIDocumento3 páginasS5B - Comparadores Lógicos IIJulio CesarAún no hay calificaciones
- Skill de HabilidadesDocumento3 páginasSkill de HabilidadesJulio CesarAún no hay calificaciones
- Nome: Enrique Martin Méndez Tirado Básico 4 PortuguésDocumento4 páginasNome: Enrique Martin Méndez Tirado Básico 4 PortuguésJulio CesarAún no hay calificaciones
- Cronograma ITQ Cisco PYTHON PDFDocumento1 páginaCronograma ITQ Cisco PYTHON PDFJulio CesarAún no hay calificaciones
- CIWE001 000 XX PL BM 000001 R01 - EnviadoDocumento51 páginasCIWE001 000 XX PL BM 000001 R01 - EnviadoAlek ValdesAún no hay calificaciones
- Introducción Al Diseño de Un Sistema Digital Con Un HDLDocumento26 páginasIntroducción Al Diseño de Un Sistema Digital Con Un HDLTenshi Yair MarinAún no hay calificaciones
- InformeDocumento8 páginasInformeCuenta SecundariaAún no hay calificaciones
- Trabajo SotoDocumento8 páginasTrabajo SotoZaid GallegosAún no hay calificaciones
- Digital Video Recorder Videoman VMD 316MDocumento111 páginasDigital Video Recorder Videoman VMD 316MSilvia MaresAún no hay calificaciones
- Caracteristica de La Familia 11Documento7 páginasCaracteristica de La Familia 11Jairo CobeñaAún no hay calificaciones
- Características de Las Prácticas PedagógicasDocumento7 páginasCaracterísticas de Las Prácticas PedagógicascristianAún no hay calificaciones
- Ensayo Sobre Las Tic en Las EmpresasDocumento5 páginasEnsayo Sobre Las Tic en Las Empresascarlosu2575% (4)
- Modelo - Plan de AuditoriaDocumento2 páginasModelo - Plan de AuditoriaochoasanchezAún no hay calificaciones
- Informe Venao ValleyDocumento9 páginasInforme Venao ValleyOmar CohenAún no hay calificaciones
- Tipos de RobotsDocumento2 páginasTipos de RobotsHoracio LeonAún no hay calificaciones
- Guía para El Uso de Recursos Educativos WOLFRAM ALPHA y GEOGEBRADocumento5 páginasGuía para El Uso de Recursos Educativos WOLFRAM ALPHA y GEOGEBRAeverlidesAún no hay calificaciones
- Sistemas de TelefoníaDocumento5 páginasSistemas de TelefoníaMiguel RodriguezAún no hay calificaciones
- UntitledDocumento34 páginasUntitledGladys Bello RivasAún no hay calificaciones
- Unidad 1 Fundamentos de Ingenieria EconomicaDocumento80 páginasUnidad 1 Fundamentos de Ingenieria Economicaenry75Aún no hay calificaciones
- Diseño Losa Por NTC-04-CCGDocumento11 páginasDiseño Losa Por NTC-04-CCGSssscorpionAún no hay calificaciones
- Cambio EnfriadorDocumento2 páginasCambio EnfriadorDiego Gonzalez BuendiaAún no hay calificaciones
- Caballo de FuerzaDocumento3 páginasCaballo de FuerzaMarielena MejiaAún no hay calificaciones
- Cuestionario #3Documento5 páginasCuestionario #3Brayan David Alarcon CastilloAún no hay calificaciones
- PEA TelecomunicacionesDocumento13 páginasPEA TelecomunicacionesJonathan SimancasAún no hay calificaciones
- Simulador Solar Con FlashDocumento58 páginasSimulador Solar Con FlashjjgaldosAún no hay calificaciones
- Ensayo Flor de MariaDocumento8 páginasEnsayo Flor de MariaMiguel GarciaAún no hay calificaciones
- Bibliografia MajoDocumento2 páginasBibliografia MajoMaría José Martí BernardesAún no hay calificaciones
- Listas de Precios Redes Sociales MotosDocumento5 páginasListas de Precios Redes Sociales Motosceballos07Aún no hay calificaciones
- Codigo GrayDocumento2 páginasCodigo GrayVladimir CortezAún no hay calificaciones
- Alpha Plus PDFDocumento60 páginasAlpha Plus PDFErnesto SaraviaAún no hay calificaciones
- Tarea Semana 8 Costos para La Toma de Decisiones PDFDocumento2 páginasTarea Semana 8 Costos para La Toma de Decisiones PDFLorena Silva Mutis0% (1)
- 21 Hoja de Vida Academica MoradoDocumento2 páginas21 Hoja de Vida Academica MoradoCarlos Iván GutierrezAún no hay calificaciones
- PROYECTO DE IMPLEMENTACION 5S Tarea 2Documento5 páginasPROYECTO DE IMPLEMENTACION 5S Tarea 2meyllin floresAún no hay calificaciones
- Triptico Ahorro de Energia ElectricaDocumento2 páginasTriptico Ahorro de Energia Electricayovanka fernandezAún no hay calificaciones