También podría gustarte
- I1 Palango SCADocumento9 páginasI1 Palango SCAOswaldo PalangoAún no hay calificaciones
- Trabajo F1 - ICA - V2-2020 - NivelaciónDocumento2 páginasTrabajo F1 - ICA - V2-2020 - NivelaciónJose Luis RiveraAún no hay calificaciones
- Trabajo F1 - ICA - v2018 - Impar PDFDocumento2 páginasTrabajo F1 - ICA - v2018 - Impar PDFFabricio Benavente100% (1)
- Trabajo F1 - ICA - V2019 - ImparDocumento2 páginasTrabajo F1 - ICA - V2019 - ImparJunior Tejada SanchezAún no hay calificaciones
- Modelamiento Masa Resorte PDFDocumento11 páginasModelamiento Masa Resorte PDFErick Eduardo Cancho PuseAún no hay calificaciones
- Trabajo F1 - ICA - v2017 - Ciclo de NivelaciónDocumento2 páginasTrabajo F1 - ICA - v2017 - Ciclo de NivelaciónCesar Canales MinayaAún no hay calificaciones
- Laboratorio DSPDocumento6 páginasLaboratorio DSPdaniel saninAún no hay calificaciones
- Simulacion ROBOT 2GDLDocumento14 páginasSimulacion ROBOT 2GDLjulieta marquezAún no hay calificaciones
- Informe 1 Control 1Documento9 páginasInforme 1 Control 1Laura MenesesAún no hay calificaciones
- E4 - 44 - Santiago Cadavid GomezDocumento11 páginasE4 - 44 - Santiago Cadavid GomezAndrés TabordaAún no hay calificaciones
- Practica 1 - Torres&MedinaDocumento7 páginasPractica 1 - Torres&MedinaRicardo TorresAún no hay calificaciones
- Modelo Dinámico 2R-P PDFDocumento15 páginasModelo Dinámico 2R-P PDFMarco RodríguezAún no hay calificaciones
- Junta TDocumento16 páginasJunta TChris FloresAún no hay calificaciones
- Lab3 Sanjur Brown Pita PDFDocumento10 páginasLab3 Sanjur Brown Pita PDFOmar LopezAún no hay calificaciones
- Metodo de Region AlcanzableDocumento15 páginasMetodo de Region AlcanzableAngelo VarelaAún no hay calificaciones
- Practica 6 TrasDocumento3 páginasPractica 6 TrasFernando CorteAún no hay calificaciones
- Paper 3 SistemasDocumento4 páginasPaper 3 SistemasoscarAún no hay calificaciones
- Informe Final 02 Sistemas de Control 1Documento8 páginasInforme Final 02 Sistemas de Control 1Jorge Gustavo Santiago SotoAún no hay calificaciones
- Vibraciones Mecanicas PracticaDocumento7 páginasVibraciones Mecanicas PracticaSteven LucarioAún no hay calificaciones
- Informe de Laboratorio 1Documento8 páginasInforme de Laboratorio 1Jhnonny RamirezAún no hay calificaciones
- Entrega Final ProyectoDocumento5 páginasEntrega Final ProyectoKIi LeeAún no hay calificaciones
- Avance Proyecto Modelamiento de SistemasDocumento7 páginasAvance Proyecto Modelamiento de SistemasJuan Pablo PeñaAún no hay calificaciones
- Fase4 Grupo47Documento16 páginasFase4 Grupo47jtejada90Aún no hay calificaciones
- Gráficas de Curvas Parametricas y en El EspacioDocumento11 páginasGráficas de Curvas Parametricas y en El EspacioNelidaAún no hay calificaciones
- Matlab Campos Vectoriales y GraficasDocumento10 páginasMatlab Campos Vectoriales y GraficasSantiago DíazAún no hay calificaciones
- 203041-1 - Fase 2 - David BolañoDocumento17 páginas203041-1 - Fase 2 - David BolañodabAún no hay calificaciones
- Guía FS 0211 Física General IDocumento99 páginasGuía FS 0211 Física General IEnriqueNoaAún no hay calificaciones
- Laboratorio 1Documento14 páginasLaboratorio 1Nhilson Denys Torres TorresAún no hay calificaciones
- Herramientas de Software y Hardware para Trabajar Con Señales y SistemasDocumento14 páginasHerramientas de Software y Hardware para Trabajar Con Señales y SistemasJulian IguavitaAún no hay calificaciones
- Taller1 SolucionDocumento32 páginasTaller1 SolucionJuan Diego Plaza GómezAún no hay calificaciones
- Tarea 2Documento7 páginasTarea 2Fabián Andrés Aguirre BarreraAún no hay calificaciones
- Análisis de Posición Del Mecanismo de Biela-Manivela-CorrederaDocumento9 páginasAnálisis de Posición Del Mecanismo de Biela-Manivela-CorrederaAlex L. Puerto100% (3)
- Mecanismos y Vibraciones Mecanicas Tarea 1Documento14 páginasMecanismos y Vibraciones Mecanicas Tarea 1Fernando Andrés Durán DonosoAún no hay calificaciones
- Práctica 6 - Daniel Sánchez Pérez LaraDocumento11 páginasPráctica 6 - Daniel Sánchez Pérez LaraAna Pau OlveraAún no hay calificaciones
- Sapena 1Documento9 páginasSapena 1Pedro Nuñez RamirezAún no hay calificaciones
- Simulación de Un Modelo Matemático Linealizado.Documento13 páginasSimulación de Un Modelo Matemático Linealizado.Isay HuicocheaAún no hay calificaciones
- Region AlcanzableDocumento8 páginasRegion AlcanzableSebastian VegaAún no hay calificaciones
- Articulo Cinematica Directa KUKADocumento5 páginasArticulo Cinematica Directa KUKAAimee MizraimAún no hay calificaciones
- Aplicaciones de La Geometria Analitica en MatlabDocumento2 páginasAplicaciones de La Geometria Analitica en MatlabMisael AlcantaraAún no hay calificaciones
- Análisis de Un Brazo Robótico Con Tres Grados de LibertadDocumento37 páginasAnálisis de Un Brazo Robótico Con Tres Grados de LibertadMax UhleAún no hay calificaciones
- Analisis de Las Funciones en MATLABDocumento10 páginasAnalisis de Las Funciones en MATLABJuan Reyes100% (1)
- T2 15170-2-2022 JuanVegaDocumento13 páginasT2 15170-2-2022 JuanVegaJuan Vega FuentesAún no hay calificaciones
- Usos Practicos de MatlabDocumento10 páginasUsos Practicos de MatlabRotmanQuimbitaAún no hay calificaciones
- Labo 6 Malca NuevoDocumento5 páginasLabo 6 Malca Nuevodark zeroAún no hay calificaciones
- Sistemas de Control Uso Del .MatDocumento22 páginasSistemas de Control Uso Del .Matabel isaac huaytalla cotrinaAún no hay calificaciones
- Practica 2 - Simulaciones para Matlab y SimulinkDocumento4 páginasPractica 2 - Simulaciones para Matlab y SimulinkJimmy Arias (JimmyStron)Aún no hay calificaciones
- Práctica 3 - Simulaciones para LabVIEW y Simulink PDFDocumento3 páginasPráctica 3 - Simulaciones para LabVIEW y Simulink PDFJimmy Arias (JimmyStron)Aún no hay calificaciones
- Reporte Trabajo Final Fabricio Donato y Miguel ChavesDocumento9 páginasReporte Trabajo Final Fabricio Donato y Miguel ChavesFabricio DonatoAún no hay calificaciones
- Practica 5Documento6 páginasPractica 5gerald ochoa perezAún no hay calificaciones
- Taller 2. Gráficas en MatlabDocumento5 páginasTaller 2. Gráficas en MatlabDaniel PerezAún no hay calificaciones
- Cuestionario 3 Parcial - Grupo3 GraficaDocumento98 páginasCuestionario 3 Parcial - Grupo3 GraficaJONATHAN ADONIS PASTE ZAMBRANOAún no hay calificaciones
- García Hernández SaúlDocumento4 páginasGarcía Hernández SaúlSaúl García HernándezAún no hay calificaciones
- 1representacion y Comparacion de Datos Mediante El Uso de GraficasDocumento23 páginas1representacion y Comparacion de Datos Mediante El Uso de Graficasmateo182223Aún no hay calificaciones
- Tarea 2 Control Automatico FullDocumento33 páginasTarea 2 Control Automatico FullSergio Enrique Berrios GonzalezAún no hay calificaciones
- Guia 1 - Diagrama de BloquesDocumento5 páginasGuia 1 - Diagrama de BloquesGaston CortezAún no hay calificaciones
- Laboratorio1 Diagrama Bloques Simulink V2Documento8 páginasLaboratorio1 Diagrama Bloques Simulink V2AndresChangoluisaAún no hay calificaciones
- Estadistic N1Documento2 páginasEstadistic N1Joel AlexanderAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- A Qué Temperatura La Lectura E1Documento22 páginasA Qué Temperatura La Lectura E1Alejandro Ledezma67% (3)
- Manual de Politicas de Seguridad Informatica de AudioCareDocumento15 páginasManual de Politicas de Seguridad Informatica de AudioCareGerardo Vidal Rufino RafaelAún no hay calificaciones
- SIMULACRO 4 - Area CDocumento17 páginasSIMULACRO 4 - Area CQuindallAún no hay calificaciones
- DiscapacidadDocumento21 páginasDiscapacidadMyriam Noemi del Valle RuizAún no hay calificaciones
- Rango GeograficoDocumento60 páginasRango GeograficoNicolas Ignacio Aliaga MachucaAún no hay calificaciones
- Evaluacion de SocialesDocumento3 páginasEvaluacion de SocialesAndrango Efraín Ronnal0% (1)
- Cultura Fenicia MonografíaDocumento23 páginasCultura Fenicia MonografíaSamantha Milagros100% (1)
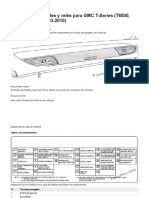
- Digrama Fusibles GMC t7500 2006Documento8 páginasDigrama Fusibles GMC t7500 2006ObedAlvaradoAún no hay calificaciones
- Tipo de TejidosDocumento3 páginasTipo de TejidosFernández García LitzyAún no hay calificaciones
- Diferencias Entre Uniones Empernadas y Uniones SoldadasDocumento7 páginasDiferencias Entre Uniones Empernadas y Uniones SoldadasMarquito34Aún no hay calificaciones
- Que Es El SobrecalentamientoDocumento6 páginasQue Es El SobrecalentamientoEduardo Silva MonteroAún no hay calificaciones
- Manual de Contabilidad para Las Empresas Del Sistema FinancieroDocumento12 páginasManual de Contabilidad para Las Empresas Del Sistema FinancieroKLEIDER-GAMERAún no hay calificaciones
- Metodos y Tecnicas de EvaluacionDocumento7 páginasMetodos y Tecnicas de EvaluacionMary FuentesAún no hay calificaciones
- Direccion de Proyectos PMI II. Preguntas FrecuentesDocumento6 páginasDireccion de Proyectos PMI II. Preguntas FrecuentesRichard ValarezoAún no hay calificaciones
- FEPADEDocumento6 páginasFEPADEJocelin CortezAún no hay calificaciones
- The Great Belt LinkDocumento21 páginasThe Great Belt LinkAndres Martinez MartinezAún no hay calificaciones
- Ley de AvogadroDocumento5 páginasLey de AvogadroJhon BurgosAún no hay calificaciones
- Copia de Trabajo de Entrega Semana #5Documento23 páginasCopia de Trabajo de Entrega Semana #5Jesus DavidAún no hay calificaciones
- Producto Acreditable Cardiología.Documento5 páginasProducto Acreditable Cardiología.John Becerra SalazarAún no hay calificaciones
- 2.-La Primera Hora de RNDocumento23 páginas2.-La Primera Hora de RNCarmenAún no hay calificaciones
- Resumen de EnergiaDocumento4 páginasResumen de EnergiaVictor BlancoAún no hay calificaciones
- Problemas Propuestos de Excavación y TransporteDocumento3 páginasProblemas Propuestos de Excavación y TransporteMiguel Andrés100% (1)
- Flujograma Sobre La Evaluacion Del Examen Medico OcupacioanlDocumento12 páginasFlujograma Sobre La Evaluacion Del Examen Medico OcupacioanlyiselAún no hay calificaciones
- El Ojo Humano Como Detector AstronómicoDocumento2 páginasEl Ojo Humano Como Detector AstronómicoRocíoAntaramiánAún no hay calificaciones
- Educacion VialDocumento51 páginasEducacion VialOscar OrtizAún no hay calificaciones
- Invocar Espiritus Frente A Un EspejoDocumento35 páginasInvocar Espiritus Frente A Un Espejodaniel 666100% (2)
- Agencias PublicitariasDocumento6 páginasAgencias PublicitariasPerla Marina De La CruzAún no hay calificaciones
- Guia OMS Criptococosis PDFDocumento9 páginasGuia OMS Criptococosis PDFtaniaAún no hay calificaciones
- Siemens LMExDocumento15 páginasSiemens LMExJuanAún no hay calificaciones
- Unidad 2 Ordenacion Documental Ingrid Johanna GaitanDocumento13 páginasUnidad 2 Ordenacion Documental Ingrid Johanna Gaitaningrid johanna GaitanAún no hay calificaciones