También podría gustarte
- Manual de Transición Agroecológica para La Agricultura FamiliarDocumento212 páginasManual de Transición Agroecológica para La Agricultura FamiliarCristian ChamblasAún no hay calificaciones
- Aplicaciones de biotecnología y bioinformática en diferentes áreas de la producción animalDe EverandAplicaciones de biotecnología y bioinformática en diferentes áreas de la producción animalAún no hay calificaciones
- Manualtecnicoeconomicodel MaquiparacosechamecanizadaDocumento79 páginasManualtecnicoeconomicodel MaquiparacosechamecanizadaMATÍASAún no hay calificaciones
- Modelo de negocio de aprovechamiento energético de biogás en frigoríficosDe EverandModelo de negocio de aprovechamiento energético de biogás en frigoríficosAún no hay calificaciones
- Fase2 Danilo Pumarejo Actividad-IndividualDocumento9 páginasFase2 Danilo Pumarejo Actividad-Individualdanilo andres pumarejoAún no hay calificaciones
- VH JJFGDocumento5 páginasVH JJFGOmar Oruna SupoAún no hay calificaciones
- TESINADPP2Documento13 páginasTESINADPP2Raymundo IslasAún no hay calificaciones
- Reporte Final Integradora E162-1Documento15 páginasReporte Final Integradora E162-1KAREN AILYN MONTES LÓPEZAún no hay calificaciones
- Resiliencia. Comunitaria PDFDocumento12 páginasResiliencia. Comunitaria PDFJosé MogollónAún no hay calificaciones
- HooooyDocumento29 páginasHooooyYeizon CanoAún no hay calificaciones
- Art Jenifer PPDel Pozo ESDocumento15 páginasArt Jenifer PPDel Pozo ESMarcel MontanoAún no hay calificaciones
- JajajajajjDocumento10 páginasJajajajajjWalt SosaAún no hay calificaciones
- Anteproyecto Pellets DHJ 09 05 21Documento40 páginasAnteproyecto Pellets DHJ 09 05 21JoseAún no hay calificaciones
- Manejo de Software Aplicado A BovinosDocumento10 páginasManejo de Software Aplicado A BovinosSamuel Enrique Hernandez NiñoAún no hay calificaciones
- 6019 - Proyecto GrupalDocumento7 páginas6019 - Proyecto GrupalKevin Cedeño 7w7Aún no hay calificaciones
- 6019 - Proyecto GrupalDocumento7 páginas6019 - Proyecto GrupalKevin Cedeño 7w7Aún no hay calificaciones
- Tesis de Grado Reinaldo F. Rivero J.Documento42 páginasTesis de Grado Reinaldo F. Rivero J.yarubit100% (1)
- Informe Final de La Practica EmpresarialDocumento27 páginasInforme Final de La Practica EmpresarialJuan Camilo Elejalde OcampoAún no hay calificaciones
- U4 Act3RentabilidadDeLosSistemasDocumento9 páginasU4 Act3RentabilidadDeLosSistemasAlexia Zachamy JimenezAún no hay calificaciones
- Christensen, DaianaDocumento44 páginasChristensen, Daianacajer2005Aún no hay calificaciones
- Metodo MesmisDocumento198 páginasMetodo MesmisPaul LV100% (1)
- Tarea IiiDocumento10 páginasTarea Iiielian anonio chavez montielAún no hay calificaciones
- Propuesta InvernaderoDocumento31 páginasPropuesta InvernaderoRomario Quiroz Chaverra33% (3)
- Proyecto Preliminar - Agricultura de PrecisiónDocumento7 páginasProyecto Preliminar - Agricultura de PrecisiónCristian Yauri SalazarAún no hay calificaciones
- TR1 SigDocumento16 páginasTR1 SigElvis Muñoz Fernández0% (1)
- Proyecto MicrobiologíaDocumento16 páginasProyecto MicrobiologíaCristhian GongoraAún no hay calificaciones
- Balance Energético de Central AzucareroDocumento21 páginasBalance Energético de Central Azucarerolitog72210Aún no hay calificaciones
- ForoDocumento12 páginasForoedison gonzalez lopezAún no hay calificaciones
- Patel Tercera Version 3.1Documento22 páginasPatel Tercera Version 3.1IsaiPtpRochaAún no hay calificaciones
- Tarea 5 - Fundamentos y Generalidades de InvestigaciónDocumento5 páginasTarea 5 - Fundamentos y Generalidades de InvestigaciónmartinAún no hay calificaciones
- Determinación de Los Costos de Calidad en El Proceso Productivo de La LecheDocumento5 páginasDeterminación de Los Costos de Calidad en El Proceso Productivo de La LecheVanessa SifontesAún no hay calificaciones
- Evaluación Final EpistemologiaDocumento8 páginasEvaluación Final EpistemologiaEdinson Padilla PajaroAún no hay calificaciones
- Avance 2 ListoDocumento47 páginasAvance 2 ListoSayuriAún no hay calificaciones
- Costo de La Producción de Ganado LecheroDocumento18 páginasCosto de La Producción de Ganado LecheroLaryssaPedra31Aún no hay calificaciones
- Implementación de Un Sistema de Alimentación Liquida para Ganado BovinoDocumento15 páginasImplementación de Un Sistema de Alimentación Liquida para Ganado BovinoJhon brandon Álvarez SolísAún no hay calificaciones
- 357 648 1 PBDocumento15 páginas357 648 1 PBMario CastilloAún no hay calificaciones
- EkomilkDocumento3 páginasEkomilkPaulo McCormickAún no hay calificaciones
- Implementación de Energía Solar Fotovoltaica en La Ganadería SostenibleDocumento15 páginasImplementación de Energía Solar Fotovoltaica en La Ganadería SostenibleZe alex Paredes gonzalezAún no hay calificaciones
- Proyecto IntegradorDocumento86 páginasProyecto IntegradorJoseGuayasaminAún no hay calificaciones
- Revista de Sistemas Experimentales V3 N9 10Documento11 páginasRevista de Sistemas Experimentales V3 N9 10Marcelo P EsparzaAún no hay calificaciones
- Antolog Balances1Documento125 páginasAntolog Balances1Marino Marozzi RojasAún no hay calificaciones
- Proyecto Integrador EscritoDocumento31 páginasProyecto Integrador EscritoPaul Freire DiazAún no hay calificaciones
- 3 SupermagroDocumento30 páginas3 Supermagromariela gonzalezAún no hay calificaciones
- Sanidad y Bioseguridad en La Ganaderia Doble PropositoDocumento10 páginasSanidad y Bioseguridad en La Ganaderia Doble PropositoVenezuelaGanadera.comAún no hay calificaciones
- Final Pdf-BioDocumento26 páginasFinal Pdf-BioMIGUEL ANGEL CACHA SILUPUAún no hay calificaciones
- Indicadores de Desarrollo Sostenible - Sarmiento-YepezDocumento70 páginasIndicadores de Desarrollo Sostenible - Sarmiento-YepezGemy CedeñoAún no hay calificaciones
- Revista Notileche 86Documento40 páginasRevista Notileche 86alolivetAún no hay calificaciones
- Prodcutos Lacteos ..Kevin Paredes CelisDocumento10 páginasProdcutos Lacteos ..Kevin Paredes CelisKevin Paredes CelisAún no hay calificaciones
- Carlos Andrés Mejía Vergel Johan Jesús Domínguez Fúnez Director: Msc. Sergio SánchezDocumento47 páginasCarlos Andrés Mejía Vergel Johan Jesús Domínguez Fúnez Director: Msc. Sergio SánchezCarlos Andrés Mejía VergelAún no hay calificaciones
- Facultad de Ciencias Agropecuarias: Universidad Nacional de Colombia - Sede PalmiraDocumento15 páginasFacultad de Ciencias Agropecuarias: Universidad Nacional de Colombia - Sede PalmiraMaria Camila Munoz GutierrezAún no hay calificaciones
- Energía Solar en Granjas AvícolasDocumento4 páginasEnergía Solar en Granjas AvícolasAlejandra GuevaraAún no hay calificaciones
- 9 CompostaDocumento34 páginas9 Compostamariela gonzalezAún no hay calificaciones
- Fase 5 Desarrollar Evaluación FinalDocumento5 páginasFase 5 Desarrollar Evaluación Finaljaumer garcia millanAún no hay calificaciones
- Caracterización de Sistemas de Producción Lechera de EcuadorDocumento14 páginasCaracterización de Sistemas de Producción Lechera de EcuadorSandra Navarro CunyaracheAún no hay calificaciones
- Manual Transformación Frutas y HortalizasDocumento131 páginasManual Transformación Frutas y HortalizasSandra Castrillon0% (2)
- Investigación II (1) CORTEDocumento19 páginasInvestigación II (1) CORTEAngie Daniela Giraldo LondonoAún no hay calificaciones
- Informe Visita Ciat - CenicañaDocumento17 páginasInforme Visita Ciat - CenicañablancaelsyruizsusaAún no hay calificaciones
- Informe Final AlexeyDocumento17 páginasInforme Final AlexeyKevin Stiven Guisao AlcarazAún no hay calificaciones
- Estudio Comparativo de Factibilidad Entre Cultivo Hidroponico y Cultivo Tradicional de Hortalizas de HojaDocumento25 páginasEstudio Comparativo de Factibilidad Entre Cultivo Hidroponico y Cultivo Tradicional de Hortalizas de HojaAlonzo PerezAún no hay calificaciones
- Kevin Laboratorio 61811508Documento12 páginasKevin Laboratorio 61811508kevin vasquezAún no hay calificaciones
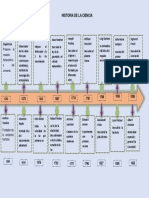
- LineaTiempo Ciencia 2Documento1 páginaLineaTiempo Ciencia 2Ibeth Jahilin Barrios GonzalezAún no hay calificaciones
- Trabajo 2 - PPTDocumento15 páginasTrabajo 2 - PPTEduard MendozaAún no hay calificaciones
- El Regalo Del MarDocumento8 páginasEl Regalo Del Marjessica.ram2449Aún no hay calificaciones
- CongresoDocumento14 páginasCongresodouglas100% (1)
- Astrologia EvolutivaDocumento64 páginasAstrologia EvolutivaVito Segovia100% (2)
- EstrategiasDocumento2 páginasEstrategiasRAMSES ARIASAún no hay calificaciones
- El Software de Astronomía COELIX APEX 2Documento32 páginasEl Software de Astronomía COELIX APEX 2Nuri DuranAún no hay calificaciones
- Sinonimos y ConocimientosDocumento41 páginasSinonimos y ConocimientosVictor Alan Vela VasquezAún no hay calificaciones
- Cuadro ComparativoDocumento4 páginasCuadro ComparativoGlennis Lissett Rodelo ZerpaAún no hay calificaciones
- Direcciones Primitivas de Aly Ben Ragel, Atacires, Tito MaciaDocumento10 páginasDirecciones Primitivas de Aly Ben Ragel, Atacires, Tito MaciaClaudia AzicriAún no hay calificaciones
- Actividad 3 - ¡La Brújula!Documento4 páginasActividad 3 - ¡La Brújula!Andrea quintero PAún no hay calificaciones
- Propiedades Extradimensionales de Los OvnisDocumento10 páginasPropiedades Extradimensionales de Los OvnisAle ZamoranoAún no hay calificaciones
- La Raya Que Queria Ser CirculoDocumento2 páginasLa Raya Que Queria Ser CirculoXAVI VELASQUEZ SANTIZOAún no hay calificaciones
- H.UNIVERSAL 3º-1er BIMDocumento38 páginasH.UNIVERSAL 3º-1er BIMeverAún no hay calificaciones
- EL UNIVERSO EN LA ANTIGÜEDAD-lectura 1 PILEODocumento2 páginasEL UNIVERSO EN LA ANTIGÜEDAD-lectura 1 PILEOlied127994Aún no hay calificaciones
- Problemas FuerzasDocumento3 páginasProblemas FuerzasSandra GuioAún no hay calificaciones
- Cosmogonía Glacial de HörbigerDocumento15 páginasCosmogonía Glacial de HörbigerJoaquin OrtegaAún no hay calificaciones
- Presentacion Teorias Ptolomeo y Copernico Enya J Imanuel J Pablo 6 ADocumento7 páginasPresentacion Teorias Ptolomeo y Copernico Enya J Imanuel J Pablo 6 AUriel GodoyAún no hay calificaciones
- TemperamentosDocumento5 páginasTemperamentosMax BergoenAún no hay calificaciones
- Resumen IPC Primera UnidadDocumento7 páginasResumen IPC Primera UnidadodontoplanAún no hay calificaciones
- A-Magnitudes ProporcionalesDocumento2 páginasA-Magnitudes Proporcionalesjosé_vidal23Aún no hay calificaciones
- El Burrito BlancoDocumento2 páginasEl Burrito BlancoRomi Na100% (1)
- The Three Magical Books of Solomon 2Documento242 páginasThe Three Magical Books of Solomon 2tarmetojaratAún no hay calificaciones
- Secuencia Método HeurísticoDocumento5 páginasSecuencia Método Heurísticocarolina dominguezAún no hay calificaciones
- Reglas Importantísimas para Las Revoluciones SolaresDocumento3 páginasReglas Importantísimas para Las Revoluciones SolaresCoraSanchezAún no hay calificaciones
- Alfred Orage Sobre RELATOS DE BELCEBUDocumento2 páginasAlfred Orage Sobre RELATOS DE BELCEBUTercer LogosAún no hay calificaciones
- Cronologia de TiempoDocumento6 páginasCronologia de TiempoIvana CeferinoAún no hay calificaciones
- El Parte Del InfortunioDocumento6 páginasEl Parte Del InfortunioFernando RosasAún no hay calificaciones
- Contacto OVNI de AndrómedaDocumento244 páginasContacto OVNI de AndrómedaFederico Alegre100% (1)
- Cara a cara con el planeta: Una nueva mirada sobre el cambio climático alejada de las posiciones apocalípticasDe EverandCara a cara con el planeta: Una nueva mirada sobre el cambio climático alejada de las posiciones apocalípticasCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Química para geología: Aplicación en laboratorio y campoDe EverandQuímica para geología: Aplicación en laboratorio y campoCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Conciencia del tiempo: Por qué pensar como geólogos puede ayudarnos a salvar el planetaDe EverandConciencia del tiempo: Por qué pensar como geólogos puede ayudarnos a salvar el planetaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Guerra Espiritual contra los Principados del PecadoDe EverandGuerra Espiritual contra los Principados del PecadoCalificación: 5 de 5 estrellas5/5 (2)
- UF1178 - Recepción y almacenamiento de la leche y otras materias primasDe EverandUF1178 - Recepción y almacenamiento de la leche y otras materias primasCalificación: 5 de 5 estrellas5/5 (1)
- El reloj emocional: Sobre el tiempo y la vidaDe EverandEl reloj emocional: Sobre el tiempo y la vidaCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Tecnología: conectividad, nuevas tecnologías y desarrollo. Foro Paipa 2011De EverandTecnología: conectividad, nuevas tecnologías y desarrollo. Foro Paipa 2011Calificación: 4 de 5 estrellas4/5 (2)
- UF0213 - Necesidades energéticas y propuestas de instalaciones solaresDe EverandUF0213 - Necesidades energéticas y propuestas de instalaciones solaresCalificación: 5 de 5 estrellas5/5 (1)
- Viaje al centro de la Tierra: Volcanes, terremotos, minería, basura, diamantes y petróleo explicados por la geologíaDe EverandViaje al centro de la Tierra: Volcanes, terremotos, minería, basura, diamantes y petróleo explicados por la geologíaCalificación: 5 de 5 estrellas5/5 (3)
- Einstein y la teoría de la relatividad: el mangaDe EverandEinstein y la teoría de la relatividad: el mangaCalificación: 5 de 5 estrellas5/5 (3)
- Mesianismo en la filosofía contemporánea: De Benjamin a DerridaDe EverandMesianismo en la filosofía contemporánea: De Benjamin a DerridaCalificación: 5 de 5 estrellas5/5 (2)
- Diseño De Su Sistema Fotovoltaico: Paneles Solares 101: Aprenda a Instalar Y Diseñar Sus Propios Paneles Solares: Energice Su Hogar, Negocio, Barco, Vr, Rancho Y Más AplicacionesDe EverandDiseño De Su Sistema Fotovoltaico: Paneles Solares 101: Aprenda a Instalar Y Diseñar Sus Propios Paneles Solares: Energice Su Hogar, Negocio, Barco, Vr, Rancho Y Más AplicacionesAún no hay calificaciones
- UF0819 - Preelaboración de productos básicos de pasteleríaDe EverandUF0819 - Preelaboración de productos básicos de pasteleríaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Decodificando La Instalación Paneles Solares: 1a Edición: Cómo Crear Y Calcular Sus Sistemas Fotovoltaicos Para Cualquier AplicaciónDe EverandDecodificando La Instalación Paneles Solares: 1a Edición: Cómo Crear Y Calcular Sus Sistemas Fotovoltaicos Para Cualquier AplicaciónAún no hay calificaciones
- Bolon Tiku: Matemáticas Y Astronomía En La América PrecolombinaDe EverandBolon Tiku: Matemáticas Y Astronomía En La América PrecolombinaCalificación: 5 de 5 estrellas5/5 (1)
- La Historia Jamás Contada Del Tercer PlanetaDe EverandLa Historia Jamás Contada Del Tercer PlanetaCalificación: 3.5 de 5 estrellas3.5/5 (4)
- Planeta en llamas: La historia del fuego a través del tiempoDe EverandPlaneta en llamas: La historia del fuego a través del tiempoAún no hay calificaciones
- El gran calentamiento: Cómo influyó el cambio climático en el apogeo y caída de las civilizacionesDe EverandEl gran calentamiento: Cómo influyó el cambio climático en el apogeo y caída de las civilizacionesAún no hay calificaciones