También podría gustarte
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Flujo en TuberiasDocumento71 páginasFlujo en Tuberiasfabian dallosAún no hay calificaciones
- Informe Del Ciclo Del AguaDocumento11 páginasInforme Del Ciclo Del AguaGiovanni Orellana56% (9)
- Dimensionamiento de BombasDocumento57 páginasDimensionamiento de BombasRichard GalvisAún no hay calificaciones
- Curso de Mantenimiento de Sistemas Hidraulicos 3Documento46 páginasCurso de Mantenimiento de Sistemas Hidraulicos 3Ronny De La CruzAún no hay calificaciones
- Grados de Libertad y SistemasDocumento12 páginasGrados de Libertad y SistemassusanAún no hay calificaciones
- Modelado de Sistemas Mecánicos TraslacionalesDocumento29 páginasModelado de Sistemas Mecánicos Traslacionalesjames saint denis baldeon foreroAún no hay calificaciones
- Pulido ElectrolíticoDocumento14 páginasPulido ElectrolíticoLuisTea100% (1)
- Pauta Examen Ingeniería AntisísmicaDocumento14 páginasPauta Examen Ingeniería AntisísmicaMatías Cortés CamusAún no hay calificaciones
- Dinamica EstructuralDocumento25 páginasDinamica EstructuralIngJoseph100% (2)
- Clase 02 - Dinamica EstructuralDocumento31 páginasClase 02 - Dinamica EstructuralKevin Arnold Piro Centeno100% (1)
- Unidad 2 Ingenieria de Control ClásicoDocumento26 páginasUnidad 2 Ingenieria de Control ClásicoJORGESOLANOIEM83% (6)
- 2007 SI - Sist. Control para Protección de Estructuras Con Cargas Dinamicas P. ThomsonDocumento13 páginas2007 SI - Sist. Control para Protección de Estructuras Con Cargas Dinamicas P. ThomsonMelissa Blandón ArenasAún no hay calificaciones
- Trabajo de Responsabilidad Social II, Torres.Documento8 páginasTrabajo de Responsabilidad Social II, Torres.arnoltorres1128Aún no hay calificaciones
- Sistema Mecanico TraslacionalDocumento18 páginasSistema Mecanico Traslacionalmoiseszav21Aún no hay calificaciones
- Unidad 2 Ingenieria de Control ClasicoDocumento26 páginasUnidad 2 Ingenieria de Control ClasicoMario alberto espinosa pachecoAún no hay calificaciones
- Dinamica Estructural InformeDocumento15 páginasDinamica Estructural InformeDavid QuinnAún no hay calificaciones
- Sistemas de Varios Grados de LibertadDocumento12 páginasSistemas de Varios Grados de Libertadmarcomac2000Aún no hay calificaciones
- Sistemas de Parametros DistribuidosDocumento12 páginasSistemas de Parametros DistribuidosDiseño de Proyectos100% (1)
- Lec 2Documento38 páginasLec 2carolina sanchezAún no hay calificaciones
- Ingeniería sismorresistente: Sistemas de N grados de libertadDocumento104 páginasIngeniería sismorresistente: Sistemas de N grados de libertadAdrian Franco Carrrasco CordovaAún no hay calificaciones
- Trabajo Final Sismo 10 ResumenDocumento10 páginasTrabajo Final Sismo 10 ResumenRentons TAún no hay calificaciones
- Semana4 I.sr 25abril'22.lunesDocumento3 páginasSemana4 I.sr 25abril'22.lunesCristhian MejíaAún no hay calificaciones
- Artículo - Trabajo Final - 2PDocumento11 páginasArtículo - Trabajo Final - 2PJames ManobandaAún no hay calificaciones
- Propiedades Estructurales de Los Sistemas MúltiplesDocumento12 páginasPropiedades Estructurales de Los Sistemas MúltiplesJose Ivan CarrilloAún no hay calificaciones
- Consideraciones SismicasDocumento16 páginasConsideraciones SismicasRafael Uzeda GarciaAún no hay calificaciones
- Sismos 6Documento23 páginasSismos 6betzy arapa asquiAún no hay calificaciones
- Dinámica estructural UNAH-VSDocumento15 páginasDinámica estructural UNAH-VSMiguel JuscamaitaAún no hay calificaciones
- Sistemas de Control para La Protección de Estructuras CivilesDocumento13 páginasSistemas de Control para La Protección de Estructuras CivilesJeover Giraldo HurtadoAún no hay calificaciones
- Sistema de 1GDLDocumento5 páginasSistema de 1GDLAldo E. Barrios LeónAún no hay calificaciones
- Sistemas de Control de Respuesta Sísmica en EdificacionesDocumento18 páginasSistemas de Control de Respuesta Sísmica en EdificacionesBrian Machicado MirandaAún no hay calificaciones
- Material Informativo 05Documento10 páginasMaterial Informativo 05Anibal Bendezu BarretoAún no hay calificaciones
- Modelacion de Sitemas MecanicosDocumento26 páginasModelacion de Sitemas MecanicosDario AbelAún no hay calificaciones
- Sistemas de Control para La Protección de Estructuras Civiles Sometidas A Cargas DinámicasDocumento19 páginasSistemas de Control para La Protección de Estructuras Civiles Sometidas A Cargas DinámicasJose Carlos GüemesAún no hay calificaciones
- Cap 09 ASxSupModalDocumento40 páginasCap 09 ASxSupModalEnaid silvaAún no hay calificaciones
- Analisis Modal EspectralDocumento16 páginasAnalisis Modal EspectralAlex Santa Cruz VargasAún no hay calificaciones
- Dinámica EstructuralDocumento7 páginasDinámica EstructuralLenin TorresAún no hay calificaciones
- SismoDocumento19 páginasSismoEdwardCastilloHuamanAún no hay calificaciones
- Sesion N°07-Sistema Generalizado y Condensación EstáticaDocumento16 páginasSesion N°07-Sistema Generalizado y Condensación Estáticakevin berrios floresAún no hay calificaciones
- Ecuaciones rectoras para sistemas de un solo grado de libertadDocumento41 páginasEcuaciones rectoras para sistemas de un solo grado de libertadGustavo ArmellaAún no hay calificaciones
- MetodosDocumento32 páginasMetodosDavid Rraa100% (1)
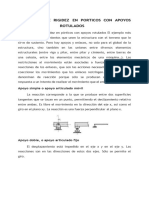
- Informe Metodo de Riridez en Portico Con Apoyo RotuladoDocumento24 páginasInforme Metodo de Riridez en Portico Con Apoyo RotuladoviajerostraveltarapotoAún no hay calificaciones
- Análisis dinámico estructuralDocumento4 páginasAnálisis dinámico estructuralCristhian RomeroAún no hay calificaciones
- Apuntes Analiisis Modal EspectralDocumento45 páginasApuntes Analiisis Modal Espectralblitz4490Aún no hay calificaciones
- Semana 10Documento53 páginasSemana 10Adrian Franco Carrrasco CordovaAún no hay calificaciones
- Líneas de influencia en estructuras isostáticasDocumento15 páginasLíneas de influencia en estructuras isostáticasGabriel VillaAún no hay calificaciones
- Informe Tarea 6Documento10 páginasInforme Tarea 6Gloria SolarteAún no hay calificaciones
- Sistemas de Un Grado de Libertad ExposicionDocumento18 páginasSistemas de Un Grado de Libertad Exposicionketty100% (1)
- T3 - Mecanica EstructuralDocumento21 páginasT3 - Mecanica EstructuralRafael OlanoAún no hay calificaciones
- Amortiguadores ViscososDocumento8 páginasAmortiguadores ViscososJose Luis Velasco CadavidAún no hay calificaciones
- Modelado de sistemas mecánicos traslacionalesDocumento29 páginasModelado de sistemas mecánicos traslacionalesJENIFER RODRIGUEZ ROBAYOAún no hay calificaciones
- Tema 9 Estructuras HiperestaticasDocumento16 páginasTema 9 Estructuras HiperestaticasDespierta Y MuéveteAún no hay calificaciones
- Dinámica EstructuralDocumento3 páginasDinámica EstructuralJosé Luis LAún no hay calificaciones
- Ecuacion de Equilibrio - Vibracion LibreDocumento24 páginasEcuacion de Equilibrio - Vibracion LibreYomira Acosta VenturaAún no hay calificaciones
- Vibración libre con amortiguamientoDocumento16 páginasVibración libre con amortiguamientoEvelyn Vergaray ColoniaAún no hay calificaciones
- Codigo LatexDocumento8 páginasCodigo Latexluis baque tumbacoAún no hay calificaciones
- Teoria Practica3Documento10 páginasTeoria Practica3ALEX CILIOAún no hay calificaciones
- Metodos Numericos en Analisis ModalesDocumento20 páginasMetodos Numericos en Analisis ModalesRamós Girón CarlosAún no hay calificaciones
- Trabajo SismosDocumento10 páginasTrabajo Sismosrossymisleniameneses1998Aún no hay calificaciones
- Henry_Fayol-00 (1)Documento16 páginasHenry_Fayol-00 (1)García Abarca Haana MireyaAún no hay calificaciones
- Modelado de Sistemas Mecanicos Con MatlabDocumento9 páginasModelado de Sistemas Mecanicos Con MatlabRicardo Alfonso Martínez AzaAún no hay calificaciones
- Laboratorio 4 ElectroquimicaDocumento15 páginasLaboratorio 4 ElectroquimicaGuillermo CárdenasAún no hay calificaciones
- Norma e 030Documento34 páginasNorma e 030Jesusdavid Ricardo Alva CarbajalAún no hay calificaciones
- Fenomeno Capilar y Proceso de ContraccionDocumento23 páginasFenomeno Capilar y Proceso de ContraccionJesus Rosas Guayac100% (1)
- Informe 3 TransmDocumento9 páginasInforme 3 Transmgabo93Aún no hay calificaciones
- Física 1 taller grupalDocumento8 páginasFísica 1 taller grupalFernando GonzálezAún no hay calificaciones
- Guía de Ejercicios #2: Ensayos Mecánicos Ejercicio 1: Ensayo de Tracción: Una Probeta Cilíndrica de Acero SAE 1020 de 20 MM de Diámetro y 100Documento16 páginasGuía de Ejercicios #2: Ensayos Mecánicos Ejercicio 1: Ensayo de Tracción: Una Probeta Cilíndrica de Acero SAE 1020 de 20 MM de Diámetro y 100TinAún no hay calificaciones
- Calor generado por un foco de luz de 40W durante 1 y 10 minutosDocumento4 páginasCalor generado por un foco de luz de 40W durante 1 y 10 minutosAdrian MonteroAún no hay calificaciones
- 6.TERMO-Segunda LeyDocumento29 páginas6.TERMO-Segunda LeyMarco Antonio T.Aún no hay calificaciones
- Laboratorio 1Documento7 páginasLaboratorio 1Katherine DiazAún no hay calificaciones
- P 2021-67 Viaducto Miguel Aleman No 217Documento6 páginasP 2021-67 Viaducto Miguel Aleman No 217Ant BautistaAún no hay calificaciones
- Segundo Principio de La Termodinámica - Ejercicios Resueltos 5-6-9-11-12-13Documento12 páginasSegundo Principio de La Termodinámica - Ejercicios Resueltos 5-6-9-11-12-13Emilia TamantiniAún no hay calificaciones
- EXAMEN 1RO BimestralDocumento2 páginasEXAMEN 1RO BimestralMisael Zanabria HuanascaAún no hay calificaciones
- Operaciones de Secado - Intercambiadores de CalorDocumento13 páginasOperaciones de Secado - Intercambiadores de CalorMercedezMartinezZapataAún no hay calificaciones
- Estructuras Ii SubirDocumento33 páginasEstructuras Ii SubirOSCAR OLMOSAún no hay calificaciones
- Cuestionario Fisica #Documento1 páginaCuestionario Fisica #Juanito BiurquezAún no hay calificaciones
- Calculo de Potencia de Bomba Con Perdidas de CargaDocumento21 páginasCalculo de Potencia de Bomba Con Perdidas de CargaRosanell mendozaAún no hay calificaciones
- Curva de SolubilidadDocumento3 páginasCurva de SolubilidadDanitza SalamancaAún no hay calificaciones
- Obtención de Esfuerzo y Deformación UnitariaDocumento5 páginasObtención de Esfuerzo y Deformación UnitarianestorAún no hay calificaciones
- Formulario TermodinamicaDocumento25 páginasFormulario TermodinamicaMiguel AcostaAún no hay calificaciones
- Preguntas Examen - Licencia Básica de PCHDocumento23 páginasPreguntas Examen - Licencia Básica de PCHGustavo Avila RodriguezAún no hay calificaciones
- Ciclo OxyfuelDocumento2 páginasCiclo Oxyfuellopez1995100% (1)
- Primer Teorema de CastiglianoDocumento17 páginasPrimer Teorema de CastiglianoOmar Renato Leiva VillegasAún no hay calificaciones
- Practica 5 FinalDocumento73 páginasPractica 5 FinalManu JMAún no hay calificaciones
- Péndulo balístico para medir velocidadDocumento5 páginasPéndulo balístico para medir velocidadDiego Manuel Torres SarzozoAún no hay calificaciones
- Luxometro (Final)Documento75 páginasLuxometro (Final)Giovanni Villavicencio Lujano100% (1)