También podría gustarte
- Metodo de Jacobi - Gauss SeidelDocumento9 páginasMetodo de Jacobi - Gauss SeidelMaribel RomeroAún no hay calificaciones
- Método Jacobi iterativoDocumento5 páginasMétodo Jacobi iterativoALVARO DIEGO MACHACA CONDORIAún no hay calificaciones
- Eje 2 Calculo IntegralDocumento15 páginasEje 2 Calculo Integralbarba blancaAún no hay calificaciones
- Sistemas de Ecuaciones Lineales: 1 2 N 1 1 2 2 N N 1 2 N I IDocumento19 páginasSistemas de Ecuaciones Lineales: 1 2 N 1 1 2 2 N N 1 2 N I IPabloAún no hay calificaciones
- Sistemas de Ecuaciones Lineales: 1 2 N 1 1 2 2 N N 1 2 N I IDocumento15 páginasSistemas de Ecuaciones Lineales: 1 2 N 1 1 2 2 N N 1 2 N I IluciaAún no hay calificaciones
- 26 Jacobi-GaussSeidelDocumento34 páginas26 Jacobi-GaussSeidelDavid EscobarAún no hay calificaciones
- 01 SistemasEcuacionesLineales PDFDocumento19 páginas01 SistemasEcuacionesLineales PDFPabloAún no hay calificaciones
- Metodo de JacobiDocumento6 páginasMetodo de JacobiOscar Soto CedeñoAún no hay calificaciones
- Primera Evaluacion Guayaquil, 29 de Nov. de 2011 Nombre: - . .Luis Rodríguez Ojeda - . - . - . - . - . - . - . - . - . - . - . - .Paralelo: - . .Documento3 páginasPrimera Evaluacion Guayaquil, 29 de Nov. de 2011 Nombre: - . .Luis Rodríguez Ojeda - . - . - . - . - . - . - . - . - . - . - . - .Paralelo: - . .Jair Rolando Vera AvilaAún no hay calificaciones
- 5.3 Metodo Gauss SeidelDocumento5 páginas5.3 Metodo Gauss SeidelBeto GarzaAún no hay calificaciones
- 2007 04 Extraordinario Madrid Matematicas II EDocumento2 páginas2007 04 Extraordinario Madrid Matematicas II EPi Pi314Aún no hay calificaciones
- Lección 1 Vectores Matrices 22 23Documento35 páginasLección 1 Vectores Matrices 22 23Pepe FernánAún no hay calificaciones
- Practica2CCAA MatesDocumento5 páginasPractica2CCAA MatesRubén López HernándezAún no hay calificaciones
- Ejercicios Resueltos Similares Práctica Control No. 1 de Cbm105 (Febrero-Abril 2021)Documento8 páginasEjercicios Resueltos Similares Práctica Control No. 1 de Cbm105 (Febrero-Abril 2021)Julio Cesar De Los Santos MéndezAún no hay calificaciones
- ExamenExtraordinarioMatIII 20132014Documento3 páginasExamenExtraordinarioMatIII 20132014franyzubizarretaAún no hay calificaciones
- Fase4 Grupo11Documento34 páginasFase4 Grupo11Daniela santanderAún no hay calificaciones
- Madrid 2002 PDFDocumento2 páginasMadrid 2002 PDFmirandomirando44Aún no hay calificaciones
- Problemas de oposiciones matemáticas 2002Documento2 páginasProblemas de oposiciones matemáticas 2002Pati PatitaAún no hay calificaciones
- Sesion 06 - Metodo de JacobiDocumento38 páginasSesion 06 - Metodo de JacobiJACINTO WILLCAMASCCOAún no hay calificaciones
- AyGA_TP3_2020Documento8 páginasAyGA_TP3_2020Lucas NahuelAún no hay calificaciones
- PEP 2 - Cálculo Numérico (1999-2)Documento2 páginasPEP 2 - Cálculo Numérico (1999-2)Francisco Armando Ramos CcallaAún no hay calificaciones
- Matemáticas EcuacionesDocumento19 páginasMatemáticas EcuacionesRTHAún no hay calificaciones
- 01 - Desigualdades y Valor AbsolutoDocumento8 páginas01 - Desigualdades y Valor Absolutokakaroto19Aún no hay calificaciones
- Taller Cálculo Simbólico PDFDocumento61 páginasTaller Cálculo Simbólico PDFedatqAún no hay calificaciones
- GUIA 3 (Segunda Unidad)Documento2 páginasGUIA 3 (Segunda Unidad)vicente.alfaroAún no hay calificaciones
- H Calculo 1 C TDocumento2 páginasH Calculo 1 C Tb pgAún no hay calificaciones
- Apunte Metodo Iterativo JacobiDocumento7 páginasApunte Metodo Iterativo Jacobiivan gómezAún no hay calificaciones
- Método de Gauss - SeidelDocumento9 páginasMétodo de Gauss - SeidelLuisAgurtoAlarcónAún no hay calificaciones
- Taller 3 - Metodos NumericosDocumento3 páginasTaller 3 - Metodos NumericosAlberto LagosAún no hay calificaciones
- AyGA Guía 3 2023 Sistemas de Ecuaciones LinealesDocumento9 páginasAyGA Guía 3 2023 Sistemas de Ecuaciones LinealesSerg TamerAún no hay calificaciones
- 5 - 2 Métodos IterativosDocumento11 páginas5 - 2 Métodos IterativoserikAún no hay calificaciones
- Ejercicios 7 y 8 Ecuaciones DiferencialesDocumento6 páginasEjercicios 7 y 8 Ecuaciones Diferencialesluis andres torres muñozAún no hay calificaciones
- Ejercicios de ALDocumento5 páginasEjercicios de ALJanderArguelloGonzalezAún no hay calificaciones
- Factorización QR con matrices GivensDocumento14 páginasFactorización QR con matrices GivensCarbone LuisAún no hay calificaciones
- CuadráticaDocumento3 páginasCuadráticaArturo Alejandro Ceballos FuentesAún no hay calificaciones
- Función CuadráticaDocumento14 páginasFunción CuadráticaDaniel OrtegaAún no hay calificaciones
- Suma de Potencias de Las Raices de Una eDocumento9 páginasSuma de Potencias de Las Raices de Una eKile RojasAún no hay calificaciones
- Exa Madrid 2002Documento2 páginasExa Madrid 2002OsCarTelAún no hay calificaciones
- Practica 6-Ing Industrial 2022-I (1) de Profee UnmsmDocumento5 páginasPractica 6-Ing Industrial 2022-I (1) de Profee UnmsmEl Lol :v :vAún no hay calificaciones
- Tarea 1Documento19 páginasTarea 1Oscar AgudeloAún no hay calificaciones
- Primer Parcial - 2C - 2022 - Tema 2 - RDocumento5 páginasPrimer Parcial - 2C - 2022 - Tema 2 - RAgustina SartorAún no hay calificaciones
- Control 2 SolucionDocumento4 páginasControl 2 SolucionAlberto SerranoAún no hay calificaciones
- Unidad 4Documento22 páginasUnidad 4Tocoti2133Aún no hay calificaciones
- Prueba Euaciones DiferecnialesDocumento5 páginasPrueba Euaciones Diferecniales.,.Aún no hay calificaciones
- Ejercicios Resueltos - Metodos de Integracion PDFDocumento14 páginasEjercicios Resueltos - Metodos de Integracion PDFsebastian soto fernandezAún no hay calificaciones
- Métodos Iteractivos para Sistemas de Ecuaciones Lineales2Documento12 páginasMétodos Iteractivos para Sistemas de Ecuaciones Lineales2Alvaro Espinosa PerezAún no hay calificaciones
- 6203-Ejercicios Resueltos - Coulomb 01Documento2 páginas6203-Ejercicios Resueltos - Coulomb 01fmontaner1Aún no hay calificaciones
- ACTIVIDADES Ecuaciones 000Documento10 páginasACTIVIDADES Ecuaciones 000Vanessa MenendezAún no hay calificaciones
- CV Tarea2Documento5 páginasCV Tarea2Andrés Ricardo Aldana SaavedraAún no hay calificaciones
- Matrices y Sistemas de Ecuaciones LinealesDocumento25 páginasMatrices y Sistemas de Ecuaciones LinealesdraggusAún no hay calificaciones
- Hola Buenas Noches Sii Me Podría Mandar La Foto Del PagoDocumento2 páginasHola Buenas Noches Sii Me Podría Mandar La Foto Del Pagoalisperezzz12Aún no hay calificaciones
- Informe Harnero 140703130021 Phpapp02Documento2 páginasInforme Harnero 140703130021 Phpapp02DavidCuevasRuizAún no hay calificaciones
- Ficha de Estudio 3Documento2 páginasFicha de Estudio 3FabianAún no hay calificaciones
- Ecuaciones DiferencialesDocumento10 páginasEcuaciones DiferencialeselKenianoAún no hay calificaciones
- Area 2 - Vectores, Matrices y Determinantes.Documento5 páginasArea 2 - Vectores, Matrices y Determinantes.victor serranoAún no hay calificaciones
- Matrices y Sistemas de Ecuaciones LinealesDocumento25 páginasMatrices y Sistemas de Ecuaciones LinealesRodriguez Coariti Dayana AnahiAún no hay calificaciones
- Práctica de derivadas y curvas en Cálculo IDocumento5 páginasPráctica de derivadas y curvas en Cálculo IJuan JimenezAún no hay calificaciones
- Método de Fracciones SimplesDocumento5 páginasMétodo de Fracciones SimplesstebDCAún no hay calificaciones
- ARTICULO UFPS. Extraccion de ADN para ConservarDocumento5 páginasARTICULO UFPS. Extraccion de ADN para ConservarmaferAún no hay calificaciones
- ProcesosDocumento4 páginasProcesosjavier rodriguezAún no hay calificaciones
- Unidad 3 - Paso 4 - Propiedades Psicométricas y Resultados Del InstrumentoDocumento16 páginasUnidad 3 - Paso 4 - Propiedades Psicométricas y Resultados Del InstrumentoLlo Muri YliekAún no hay calificaciones
- Esquema de Informe Final Programa - 2022Documento16 páginasEsquema de Informe Final Programa - 2022Nayhelli GutierrezAún no hay calificaciones
- Manejo de Tierras EriazasDocumento27 páginasManejo de Tierras Eriazashanz saenz rodriguez100% (1)
- Conceptos Generales Riesgos HigieneDocumento7 páginasConceptos Generales Riesgos Higienecamilo bellaizaAún no hay calificaciones
- Nuevo ODI Esav CorregidoDocumento6 páginasNuevo ODI Esav CorregidoneilAún no hay calificaciones
- Matrícula Segundo Año Básico BDocumento4 páginasMatrícula Segundo Año Básico BDiego VelázquezAún no hay calificaciones
- Especificaciones técnicas bombas Flygt 3085Documento64 páginasEspecificaciones técnicas bombas Flygt 3085Felipe Andrés Muñoz DíazAún no hay calificaciones
- Primeros pobladoresDocumento5 páginasPrimeros pobladoresMagaly Quezada MendozaAún no hay calificaciones
- Dueñas Flores Marco 1PC Pi524aDocumento8 páginasDueñas Flores Marco 1PC Pi524aMarco Dueñas FloresAún no hay calificaciones
- Ejemplo 3 Consolidado Del Análisis de Las Acciones de Convivencia Escolar y Bienestar Estudiantil en La IE JoelDocumento3 páginasEjemplo 3 Consolidado Del Análisis de Las Acciones de Convivencia Escolar y Bienestar Estudiantil en La IE JoelJoel MedinaAún no hay calificaciones
- Tarea 7 - Grupo 3Documento8 páginasTarea 7 - Grupo 3Sam ReinosoAún no hay calificaciones
- Fundamentos Del DiseñoDocumento19 páginasFundamentos Del DiseñoHECTOR ANDRES RAMIREZ TORRESAún no hay calificaciones
- Proyecto Integrador 7Documento72 páginasProyecto Integrador 7Adriana BenavidesAún no hay calificaciones
- ANFIARTROSISDocumento6 páginasANFIARTROSISCatalinaAún no hay calificaciones
- Curso Trabajadores de Luz - Dia 4Documento8 páginasCurso Trabajadores de Luz - Dia 4Lupita BAún no hay calificaciones
- Determinación Espectrofotométrica Hierro SuplementoDocumento4 páginasDeterminación Espectrofotométrica Hierro SuplementoSUSAN ASHLY MARQUEZ TRASLAVINAAún no hay calificaciones
- Inspeccion 20-04-22 Cancha 8,9,10Documento1 páginaInspeccion 20-04-22 Cancha 8,9,10ALONSO ANDRE RODRIGUEZ SANDOVALAún no hay calificaciones
- Presentacion DiazinaDocumento12 páginasPresentacion DiazinaMAYERLYAún no hay calificaciones
- Informe - 7 - Movimiento ParabolicoDocumento3 páginasInforme - 7 - Movimiento ParabolicoSebastian Hache RodriguezAún no hay calificaciones
- Informe Nro. 6 - Laboratorio de Física IIIDocumento20 páginasInforme Nro. 6 - Laboratorio de Física IIIJOSE CARLOS QUEVEDO CABARCAS ESTUDIANTE ACTIVOAún no hay calificaciones
- Diseño de una junta empernada para tapa de manholeDocumento21 páginasDiseño de una junta empernada para tapa de manholeXavier VillegasAún no hay calificaciones
- Sikadur-32 GelDocumento3 páginasSikadur-32 GelDiego ChavezAún no hay calificaciones
- Portal Mexicano de La SaludDocumento13 páginasPortal Mexicano de La SaludPEDRO DUARTE GOMEZAún no hay calificaciones
- Sesión de Aprendizaje de Comunicación #06: I. Datos InformativosDocumento4 páginasSesión de Aprendizaje de Comunicación #06: I. Datos InformativosNataly RobledoAún no hay calificaciones
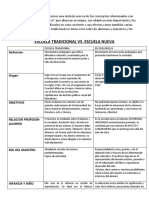
- TP Escuela NuevaDocumento7 páginasTP Escuela NuevaRooAún no hay calificaciones
- Norma Iram 2073Documento18 páginasNorma Iram 2073DrabberAcorn 04Aún no hay calificaciones
- Informe de Medida de ResistividadDocumento24 páginasInforme de Medida de ResistividadDiego Steven Rayo VillamizarAún no hay calificaciones
- Matriz de Marco Logico CompletoDocumento62 páginasMatriz de Marco Logico CompletopaulaAún no hay calificaciones