También podría gustarte
- UF0852 - Instalación y actualización de sistemas operativosDe EverandUF0852 - Instalación y actualización de sistemas operativosCalificación: 5 de 5 estrellas5/5 (1)
- 06 Clase MicrocontroladorDocumento29 páginas06 Clase MicrocontroladorVlentina Gómez NuñezAún no hay calificaciones
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Curso MicrocontroladoresDocumento70 páginasCurso MicrocontroladoresFrancisco R. SouffleAún no hay calificaciones
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Calificación: 3 de 5 estrellas3/5 (1)
- Copia de Teoria PicDocumento48 páginasCopia de Teoria PicdasiliopAún no hay calificaciones
- MicrocontroladoresDocumento20 páginasMicrocontroladoresMary HernandezAún no hay calificaciones
- Inv Aqdc Josemanuelrf U5Documento7 páginasInv Aqdc Josemanuelrf U5Pedro Daniel Rosas FajardoAún no hay calificaciones
- Instituto Tecnológico Superior de San Andrés TuxtlaDocumento7 páginasInstituto Tecnológico Superior de San Andrés TuxtlaPedro Daniel Rosas FajardoAún no hay calificaciones
- Cerradura Electronica Codificad1Documento8 páginasCerradura Electronica Codificad1Jhon JairoAún no hay calificaciones
- Investigacion 1 U1Documento11 páginasInvestigacion 1 U1ronaldoAún no hay calificaciones
- Cha Cha 18Documento8 páginasCha Cha 18Uriel JimenezAún no hay calificaciones
- Introduccion A Los MicroprocesadoresDocumento9 páginasIntroduccion A Los MicroprocesadoresEric Yair VenturaAún no hay calificaciones
- Arquitectura de Un MicrocontroladorDocumento17 páginasArquitectura de Un MicrocontroladorsamaraAún no hay calificaciones
- Monografia Micro ControladoresDocumento18 páginasMonografia Micro ControladoresJhonatan N. Cedillo FloresAún no hay calificaciones
- Recursos Comunes A Todos Los MicrocontroladoresDocumento7 páginasRecursos Comunes A Todos Los MicrocontroladoresAbraham CortezAún no hay calificaciones
- Arquitectura de Microcontrolador, PIC 16f887, PIC 18f4550Documento19 páginasArquitectura de Microcontrolador, PIC 16f887, PIC 18f4550Kathleen Leblanc100% (1)
- Diferencia Entre Microcontroladores y MicroprocesadorDocumento11 páginasDiferencia Entre Microcontroladores y MicroprocesadorCrisAún no hay calificaciones
- MicrocontroladoresDocumento13 páginasMicrocontroladoresLajuh PeñaAún no hay calificaciones
- R Circuito de Disparo Con MicrocontroladoresDocumento15 páginasR Circuito de Disparo Con MicrocontroladoresIsidro HernandezAún no hay calificaciones
- Dispositivos Lógicos MicroprogramablesDocumento63 páginasDispositivos Lógicos MicroprogramablessantanavinicioAún no hay calificaciones
- R. A. 1.1 Componentes Del MicroprocesadorDocumento29 páginasR. A. 1.1 Componentes Del MicroprocesadorJOSE GILBERTO CANO GREENEAún no hay calificaciones
- Reportes Micro 1-EjercicioDocumento21 páginasReportes Micro 1-EjercicioGerman RodriguezAún no hay calificaciones
- Práctica 1Documento13 páginasPráctica 1Mario Esteban Rebollo RebolloAún no hay calificaciones
- Vdocuments - MX Operacion de Micros e InterfacesDocumento29 páginasVdocuments - MX Operacion de Micros e Interfacesmario floresAún no hay calificaciones
- Antecedentes e Historia de La Automatizacion Programable.Documento14 páginasAntecedentes e Historia de La Automatizacion Programable.Said JaraAún no hay calificaciones
- Microprocesadores y MicrocontroladoresDocumento19 páginasMicroprocesadores y MicrocontroladoresEstefanny Medina ArrietaAún no hay calificaciones
- Unidad 1 MicrocontroladoresDocumento24 páginasUnidad 1 MicrocontroladoresIgnacio Mortera MarquezAún no hay calificaciones
- MicrocontroladoresDocumento9 páginasMicrocontroladoresJohnAndersonEspañaAún no hay calificaciones
- PicsDocumento358 páginasPicsJuan Carlos MartinAún no hay calificaciones
- Microprocesador Clase#2Documento69 páginasMicroprocesador Clase#2Docente 361 UMECITAún no hay calificaciones
- Sistemas Basados en MicroprocesadoresDocumento16 páginasSistemas Basados en MicroprocesadoresHector InbacuanAún no hay calificaciones
- Arquitectura de Computador Modelo de HarvardDocumento12 páginasArquitectura de Computador Modelo de HarvardEdgar Alexander Barros AhumadaAún no hay calificaciones
- Despradel Novas PeñaDocumento31 páginasDespradel Novas PeñaHugonzales14Aún no hay calificaciones
- Controladores IndustrialesDocumento28 páginasControladores Industrialessebastian riquelme100% (1)
- Tarea1 MicrocontroladoresDocumento24 páginasTarea1 MicrocontroladoresRaul TamezAún no hay calificaciones
- PASO2 - Grupo 309696 - 5Documento24 páginasPASO2 - Grupo 309696 - 5fabian PazoAún no hay calificaciones
- Tarea1 Investigacion MicrocontroladoresDocumento19 páginasTarea1 Investigacion MicrocontroladoresGIOVANIAún no hay calificaciones
- Consulta 1 Diferencias Microprocesador y MicrocontroladorDocumento15 páginasConsulta 1 Diferencias Microprocesador y MicrocontroladorDanny DanielAún no hay calificaciones
- Mapa Conceptual Microcontroladores (Tipos y Clasificación)Documento8 páginasMapa Conceptual Microcontroladores (Tipos y Clasificación)SAMANTHA LOPEZ MONTALVOAún no hay calificaciones
- Dokumen - Tips - 1 Conceptos Introductorios A Los Microcontroladores PDFDocumento13 páginasDokumen - Tips - 1 Conceptos Introductorios A Los Microcontroladores PDFerasmoAún no hay calificaciones
- Pedro Anato 18299858 Evaluación 1 I Corte Electiva VDocumento21 páginasPedro Anato 18299858 Evaluación 1 I Corte Electiva VPedro AnatoAún no hay calificaciones
- Microcontroladores y MicroprocesadoresDocumento6 páginasMicrocontroladores y MicroprocesadoresEduardo Carranza GuerreroAún no hay calificaciones
- TSX Micro Pl7v1 2Documento23 páginasTSX Micro Pl7v1 2eddieipenzaAún no hay calificaciones
- S2 - Arquitectura de Micro ControladoresDocumento64 páginasS2 - Arquitectura de Micro Controladoresdavid aurelio sencia torresAún no hay calificaciones
- Taller IoT Corte II SEMANA 1 Sistemas EmbebidosDocumento8 páginasTaller IoT Corte II SEMANA 1 Sistemas EmbebidosMATEOAún no hay calificaciones
- Arquitectura Von Neumann y HarvardDocumento26 páginasArquitectura Von Neumann y HarvardUlivari Alexander GomezAún no hay calificaciones
- ConsultaVLSI - Definicion de Microprocesadores y Microcontroladores FinalDocumento9 páginasConsultaVLSI - Definicion de Microprocesadores y Microcontroladores Finalcontactosgutierrez25Aún no hay calificaciones
- Microcontrolador COP8 PDFDocumento110 páginasMicrocontrolador COP8 PDFEmmanuelAraujoAún no hay calificaciones
- Practica 01 MicrosDocumento14 páginasPractica 01 MicrosAlejandro Rodriguez100% (1)
- Investigacion MicrocontroladoresDocumento8 páginasInvestigacion Microcontroladoresvictoria loeraAún no hay calificaciones
- Práctica 5Documento31 páginasPráctica 5Erick CruzAún no hay calificaciones
- MANUAL Microcontroladores UTNCDocumento20 páginasMANUAL Microcontroladores UTNCJuannita FrysAún no hay calificaciones
- Dispositivos Lógicos MicroprogramablesDocumento52 páginasDispositivos Lógicos MicroprogramablesAleska Nazareth Carvajal Acevedo100% (1)
- Concepto de MicroprocesadorDocumento9 páginasConcepto de MicroprocesadorRaroAlbertoSanchezLopezAún no hay calificaciones
- 1 Conceptos Introductorios A Los MicrocontroladoresDocumento13 páginas1 Conceptos Introductorios A Los Microcontroladoresmadruga.bernalAún no hay calificaciones
- Análisis Tecnológico de Un MicrocontroladorDocumento6 páginasAnálisis Tecnológico de Un MicrocontroladorIsmael OliveraAún no hay calificaciones
- Equipo 1 - Resumen ExposicionDocumento7 páginasEquipo 1 - Resumen ExposicionJocelyn Cervantes GascaAún no hay calificaciones
- Karq2 U3 A1 NegbDocumento9 páginasKarq2 U3 A1 NegbNelly Gutiérrez BarrónAún no hay calificaciones
- 1 2 1 Manual Practicas Microcontroladores 2017Documento44 páginas1 2 1 Manual Practicas Microcontroladores 2017carAún no hay calificaciones
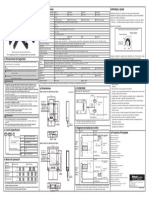
- Autonics Bup Esp ManualDocumento1 páginaAutonics Bup Esp ManualfchumpitazAún no hay calificaciones
- Circuitos Electricos. 1° PDFDocumento53 páginasCircuitos Electricos. 1° PDFRemle ScAún no hay calificaciones
- Eler11 PDFDocumento8 páginasEler11 PDFAbraham Sanchez DelCampoAún no hay calificaciones
- Diseño de Circuitos ImpresosDocumento13 páginasDiseño de Circuitos ImpresosjosejulianAún no hay calificaciones
- Informe Previo SimulacionesDocumento27 páginasInforme Previo SimulacionesLUIS KEVIN ZORIA TACILLAAún no hay calificaciones
- El Entrenamiento en CircuitoDocumento12 páginasEl Entrenamiento en CircuitoAldo Flores LopezAún no hay calificaciones
- Laboratorios 01 23082017 1806Documento8 páginasLaboratorios 01 23082017 1806antonio lopezAún no hay calificaciones
- Práctica # 14 Electronica AnalogicaDocumento6 páginasPráctica # 14 Electronica AnalogicaAntonio GalindoAún no hay calificaciones
- Taller de Sistemas Segundo - Segundo Periodo OkDocumento7 páginasTaller de Sistemas Segundo - Segundo Periodo Okvicman0407Aún no hay calificaciones
- Práctica 3 Campo EléctricoDocumento15 páginasPráctica 3 Campo Eléctricoaron barriosAún no hay calificaciones
- Aa2 - La Probabilidad y Sus LeyesDocumento8 páginasAa2 - La Probabilidad y Sus LeyesyesidAún no hay calificaciones
- Presentacion Leviton NSDocumento514 páginasPresentacion Leviton NSFrancisco Aristizabal100% (1)
- Construye Tu Volante para Videojuegos (DIY)Documento8 páginasConstruye Tu Volante para Videojuegos (DIY)EsteticoAún no hay calificaciones
- Simbologia en Equipos de MedicionDocumento13 páginasSimbologia en Equipos de Medicionjsyy2013Aún no hay calificaciones
- Qué Es Un Sistema Operativo PDFDocumento14 páginasQué Es Un Sistema Operativo PDFpao_beiap97Aún no hay calificaciones
- 6 Automatización Con Lógica Programada1Documento105 páginas6 Automatización Con Lógica Programada1Adolfo Piminchumo SausaAún no hay calificaciones
- Sistemas InverterDocumento9 páginasSistemas Inverterigor100% (2)
- Ae 317 Armario para Instalaion de Equipo de Medida y Transf de Corriente en BTDocumento2 páginasAe 317 Armario para Instalaion de Equipo de Medida y Transf de Corriente en BTCesar Augusto Cuervo MontañoAún no hay calificaciones
- Modulos I 2008 II QuimicaDocumento26 páginasModulos I 2008 II QuimicaCarlos Ruiz SanchezAún no hay calificaciones
- Calculo ElectricoDocumento7 páginasCalculo Electricoaquispefa100% (1)
- Sistema de Suspension Asistida ElectromagneticamenteDocumento19 páginasSistema de Suspension Asistida ElectromagneticamenteAlexis DavidAún no hay calificaciones
- EI-0054-Rev04-Instalador SIGAS GNV - SIGAS Installer Manual NGV - 2230054 PDFDocumento52 páginasEI-0054-Rev04-Instalador SIGAS GNV - SIGAS Installer Manual NGV - 2230054 PDFJulian Palermo100% (6)
- Plan de Estudios C-64: Programa de Ingeniería Electrónica - Universidad Del QuindíoDocumento1 páginaPlan de Estudios C-64: Programa de Ingeniería Electrónica - Universidad Del QuindíoJuan AguirreAún no hay calificaciones
- Cono de ArenaDocumento12 páginasCono de ArenaOrozco0207Aún no hay calificaciones
- B-FDC-L060-IN-10.003.003 Instructivo Balanza Mettler ToledoDocumento6 páginasB-FDC-L060-IN-10.003.003 Instructivo Balanza Mettler ToledoJose Luis RodriguezAún no hay calificaciones
- UNIDAD 2 InvestigaciónDocumento10 páginasUNIDAD 2 InvestigaciónDaniel Gregorio Vera AnastacioAún no hay calificaciones
- Guia 12 Fis109c Conduccion y Radiacion PDFDocumento3 páginasGuia 12 Fis109c Conduccion y Radiacion PDFGaBy LopezAún no hay calificaciones
- Vestida de PostesDocumento8 páginasVestida de PostesJason TujueloAún no hay calificaciones
- Catalogo VelaDocumento16 páginasCatalogo VelaJulio Cesar EstradaAún no hay calificaciones
- Semana 3 - Átomo de Bohr-Números Cuánticos Configuración ElectrónicaDocumento24 páginasSemana 3 - Átomo de Bohr-Números Cuánticos Configuración ElectrónicaKenny SantaanaAún no hay calificaciones
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaDe EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- EL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialDe EverandEL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialCalificación: 4.5 de 5 estrellas4.5/5 (7)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenDe EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenCalificación: 5 de 5 estrellas5/5 (8)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesDe EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Aprender HTML5, CSS3 y Javascript con 100 ejereciosDe EverandAprender HTML5, CSS3 y Javascript con 100 ejereciosCalificación: 5 de 5 estrellas5/5 (2)
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónDe EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónCalificación: 2 de 5 estrellas2/5 (1)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Realidad virtual y Realidad AumentaDe EverandRealidad virtual y Realidad AumentaCalificación: 4.5 de 5 estrellas4.5/5 (4)