También podría gustarte
- Unidad 1 - Vectores, Matrices y Determinantes 100408A - 474Documento17 páginasUnidad 1 - Vectores, Matrices y Determinantes 100408A - 474BEATRIZ MENDEZAún no hay calificaciones
- Leyes de NewtonDocumento13 páginasLeyes de NewtonDe La O Roman MauricioAún no hay calificaciones
- Rectas y Planos en El EspacioDocumento17 páginasRectas y Planos en El EspacioCristian RiveraAún no hay calificaciones
- Ecvv U2 Ea Gier TerminadoDocumento8 páginasEcvv U2 Ea Gier TerminadoGilberto EugenioAún no hay calificaciones
- Ejercicios Resueltos de Cinematica - 2Documento9 páginasEjercicios Resueltos de Cinematica - 2Juan Leonardo Chambilla VenegasAún no hay calificaciones
- Algebra LinealDocumento6 páginasAlgebra LinealSAITH ALEXANDER GALINDO MERIÑOAún no hay calificaciones
- Algebra para IngeniariaDocumento11 páginasAlgebra para IngeniariaAlejandro Fuantos0% (1)
- Ecvv U2 Ea Gier TerminadoDocumento10 páginasEcvv U2 Ea Gier Terminadobeto riveraAún no hay calificaciones
- Álgebra vectores 2020Documento69 páginasÁlgebra vectores 2020LuisaFernandaLeonOrtizAún no hay calificaciones
- Unidad I - Repaso de VectoresDocumento18 páginasUnidad I - Repaso de VectoresGilberto BermudezAún no hay calificaciones
- 134 Trabajo ColaborativoDocumento45 páginas134 Trabajo ColaborativoJUAN SEBASTIAN TOVAR GOMEZAún no hay calificaciones
- Tarea 1 Algebra LinealDocumento17 páginasTarea 1 Algebra Linealpatricia MoyaAún no hay calificaciones
- Ejercicios Resueltos Cap 2Documento5 páginasEjercicios Resueltos Cap 2romminaadddAún no hay calificaciones
- TP 3 PunteriaDocumento7 páginasTP 3 PunteriaDario Benigno Jesus Diaz BaezAún no hay calificaciones
- Multivariado - Trabajo Colaborativo 1Documento30 páginasMultivariado - Trabajo Colaborativo 1name34Aún no hay calificaciones
- Hoja de Trabajo de TrigonometríaDocumento7 páginasHoja de Trabajo de TrigonometríaKarel LuisAún no hay calificaciones
- Tarea 1 - Unidad 1 - Grupo 199Documento33 páginasTarea 1 - Unidad 1 - Grupo 199Luz MariaAún no hay calificaciones
- RESOLUCIÓN EJERCICIOS VECTORESDocumento19 páginasRESOLUCIÓN EJERCICIOS VECTORESjolucu120% (1)
- Solucionario Examen DinamicaDocumento7 páginasSolucionario Examen DinamicaErika Fernandez CarrascoAún no hay calificaciones
- Unidad 1 - Tarea 1Documento5 páginasUnidad 1 - Tarea 1Omarbin BrachoAún no hay calificaciones
- ProyectoDocumento11 páginasProyectoAlex MarquezAún no hay calificaciones
- Fase 6 Evaluación Final POA AlgebraDocumento13 páginasFase 6 Evaluación Final POA AlgebraWicho Cabarcas PerezAún no hay calificaciones
- Tarea2 590 Nicolas MirandaDocumento16 páginasTarea2 590 Nicolas Mirandamartin andres trujillo perdomoAún no hay calificaciones
- Fórmulas y conceptos de física y matemáticasDocumento7 páginasFórmulas y conceptos de física y matemáticasBrandon ClaresAún no hay calificaciones
- Ejercicios Clase Virtual 13.3 13.4Documento5 páginasEjercicios Clase Virtual 13.3 13.4lara gerstnerAún no hay calificaciones
- Actividad RectasDocumento16 páginasActividad RectasVanesa SanchezAún no hay calificaciones
- Examen Modelo 2018-0Documento3 páginasExamen Modelo 2018-0Luis LuritaAún no hay calificaciones
- Algebra Lineal LeoDocumento5 páginasAlgebra Lineal Leonico100% (1)
- Javier Fernandez Tarea1Documento5 páginasJavier Fernandez Tarea1Milena SalazarAún no hay calificaciones
- Javier Fernandez Tarea1 PDFDocumento5 páginasJavier Fernandez Tarea1 PDFMartín E LaraAún no hay calificaciones
- Javier Fernandez Tarea1Documento5 páginasJavier Fernandez Tarea1Milena SalazarAún no hay calificaciones
- Tarea 1Documento5 páginasTarea 1Milena Salazar100% (1)
- Javier Fernandez Tarea1Documento5 páginasJavier Fernandez Tarea1Milena Salazar100% (2)
- Durand Mendoza Midward 2da Fase DinamicaDocumento23 páginasDurand Mendoza Midward 2da Fase DinamicaMidward DurandAún no hay calificaciones
- Guía de Trabajos Prácticos Coordenadas y Vectores ResueltaDocumento9 páginasGuía de Trabajos Prácticos Coordenadas y Vectores ResueltaVictoria Chiara Lafont FADU - UBAAún no hay calificaciones
- Grua GiratoriaDocumento4 páginasGrua GiratoriaHuascar FernandezAún no hay calificaciones
- Algebra Lineal UNADDocumento10 páginasAlgebra Lineal UNADRocioDoralysAún no hay calificaciones
- Cb-g1 h2 Ico Alanoca - Claros #2Documento7 páginasCb-g1 h2 Ico Alanoca - Claros #2Choque Danner MiguelAún no hay calificaciones
- Desplazamiento de una partícula en R2Documento7 páginasDesplazamiento de una partícula en R2cristian100% (5)
- Grupal 7 AlgebraDocumento27 páginasGrupal 7 AlgebraludgardoAún no hay calificaciones
- Tarea 1henry CardonaDocumento17 páginasTarea 1henry CardonaHenry CardonaAún no hay calificaciones
- Mecánica de Fluidos: Resolución de EjerciciosDocumento23 páginasMecánica de Fluidos: Resolución de EjerciciosFlover ArcosAún no hay calificaciones
- Unidad 1 AlgebraDocumento18 páginasUnidad 1 Algebraalix peñuelaAún no hay calificaciones
- Algebra LineañDocumento44 páginasAlgebra Lineañcamilo andres covilla pedrzoAún no hay calificaciones
- 1.5. - Estimación de Coeficientes de Resistencia - Hidráulica de Canales - 6A - Edgar Álvarez MartínezDocumento7 páginas1.5. - Estimación de Coeficientes de Resistencia - Hidráulica de Canales - 6A - Edgar Álvarez MartínezEdgar ÁlvarezAún no hay calificaciones
- Examen ElizaDocumento9 páginasExamen ElizaAlexanderAún no hay calificaciones
- Ejercicios de Cálculo VectorialDocumento6 páginasEjercicios de Cálculo VectorialCARLOS DANIEL HUACANJULCA AYAYAún no hay calificaciones
- Vectores, matrices y determinantes en ingenieríaDocumento18 páginasVectores, matrices y determinantes en ingenieríaFernando MuñozAún no hay calificaciones
- Tarea 1 - Vectores, Matrices y DeterminantesDocumento25 páginasTarea 1 - Vectores, Matrices y Determinantesyuli muñozAún no hay calificaciones
- Meneses - Maycol Mecanismos Correción - De.pruebaDocumento3 páginasMeneses - Maycol Mecanismos Correción - De.pruebaMaycolAún no hay calificaciones
- Corrección ExamenDocumento4 páginasCorrección ExamenEzequiel MøralesAún no hay calificaciones
- Resolución de problemas de vectores, matrices y determinantesDocumento25 páginasResolución de problemas de vectores, matrices y determinantesSilvia Julieth Ortiz MottaAún no hay calificaciones
- Tarea2 JosenavarroDocumento12 páginasTarea2 JosenavarroYulyPaolaGongoraGarciaAún no hay calificaciones
- Algebra Lineal - Modulo 3 Creditos - E-LearningDocumento23 páginasAlgebra Lineal - Modulo 3 Creditos - E-LearningJose Vicente Ardila BarriosAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Puntos notables y escintores de un triánguloDe EverandPuntos notables y escintores de un triánguloAún no hay calificaciones
- Tratamiento Termico Post Soldadura.Documento28 páginasTratamiento Termico Post Soldadura.Leo GastonAún no hay calificaciones
- Leccion 5 Nivel 2Documento5 páginasLeccion 5 Nivel 2Francisco Batista56% (25)
- AlgoritmosDocumento4 páginasAlgoritmosJorge YpAún no hay calificaciones
- 4.3 Celdas Combustible Alcohol DirectoDocumento23 páginas4.3 Celdas Combustible Alcohol DirectoRonald Leandro GuzmanAún no hay calificaciones
- Sello de Juntas de Reservorio PDFDocumento4 páginasSello de Juntas de Reservorio PDFRussel CapchaAún no hay calificaciones
- Experimentos Con Pompas de JabónDocumento21 páginasExperimentos Con Pompas de JabónManuel GonzalezAún no hay calificaciones
- Reguladores y Variadores para Bombas de Inyección Lineales y Rotativas 1Documento18 páginasReguladores y Variadores para Bombas de Inyección Lineales y Rotativas 1Axllx Victor100% (1)
- Informe Final Cantera ConinDocumento8 páginasInforme Final Cantera ConinRudy Villacorta VillanuevaAún no hay calificaciones
- Taller de SeriesDocumento7 páginasTaller de SeriesJose ArengasAún no hay calificaciones
- Paper NewtonDocumento6 páginasPaper NewtonmeryAún no hay calificaciones
- Test de Segundo de Secundaria de MatemáticaDocumento10 páginasTest de Segundo de Secundaria de Matemáticasolcramber100% (1)
- PLANIFICACIÓN DE LA SESIÓN DE APRENDIZAJE. Los Polígonos y Su Belleza ConstructivaDocumento8 páginasPLANIFICACIÓN DE LA SESIÓN DE APRENDIZAJE. Los Polígonos y Su Belleza ConstructivaRober Castañeda Bustamante100% (1)
- Entradas Salidas Discretas - Control Real EspañolDocumento6 páginasEntradas Salidas Discretas - Control Real EspañolJoss Maykol Mundaca VasquezAún no hay calificaciones
- Gestión avanzada de centros de datos virtualesDocumento7 páginasGestión avanzada de centros de datos virtualesAriel perezAún no hay calificaciones
- Ejercicios Sobre GravimetríaDocumento2 páginasEjercicios Sobre GravimetríaabelAún no hay calificaciones
- 02 - Unidad I - Módulo DTE1 - CadesimuDocumento13 páginas02 - Unidad I - Módulo DTE1 - CadesimuFede BerniAún no hay calificaciones
- Nomenclatura InorgánicaDocumento58 páginasNomenclatura InorgánicaRobert EdwardAún no hay calificaciones
- Curso de Entrenamiento en RiggingDocumento80 páginasCurso de Entrenamiento en RiggingLuis Cárcamo Martínez100% (2)
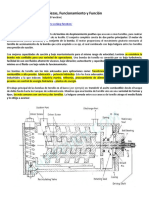
- Bombas de Tornillo - Sus Piezas - Funcionamiento y FunciónDocumento7 páginasBombas de Tornillo - Sus Piezas - Funcionamiento y FunciónRicardo ViloriaAún no hay calificaciones
- Taller 2 Mecanica de FluidosDocumento24 páginasTaller 2 Mecanica de FluidosJuanGilbertoParraAún no hay calificaciones
- 01 Identificacion de Los Elementos de Un Programa InformaticoDocumento11 páginas01 Identificacion de Los Elementos de Un Programa Informaticobruce vegaAún no hay calificaciones
- 1.-Introducción Motores A ReaccionDocumento31 páginas1.-Introducción Motores A ReaccionFrank RubioAún no hay calificaciones
- Ecuación Hazen-WilliamsDocumento43 páginasEcuación Hazen-WilliamsPamela ZanabriaAún no hay calificaciones
- 1.00 Fundamentos Del ChancadoDocumento7 páginas1.00 Fundamentos Del ChancadoAugusto Huallpayunca Quispe100% (2)
- 0601-488 - Ficha Técnica 0601-488Documento2 páginas0601-488 - Ficha Técnica 0601-488fragmentosAún no hay calificaciones
- Examen 3 Secundaria Matematica y Comunicacion Solucionario 161016 Downloable 2269333Documento32 páginasExamen 3 Secundaria Matematica y Comunicacion Solucionario 161016 Downloable 2269333Gabriela Angélica Casas MattaAún no hay calificaciones
- Lógica Proposicional - Cuantificadores Universal y ExistencialDocumento27 páginasLógica Proposicional - Cuantificadores Universal y ExistencialJefry Cardenas Sandoval100% (1)
- Numeros PrimosDocumento2 páginasNumeros PrimosmarcelahoyaAún no hay calificaciones
- Medida del pH de ácidos, bases y salesDocumento5 páginasMedida del pH de ácidos, bases y salesNeder Ballesteros BelloAún no hay calificaciones