También podría gustarte
- El problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónDe EverandEl problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónAún no hay calificaciones
- Metodos 2Documento256 páginasMetodos 2hjaramilloAún no hay calificaciones
- Matemáticas para ingeniería 2: Ecuaciones diferenciales y transformada de LaplaceDocumento67 páginasMatemáticas para ingeniería 2: Ecuaciones diferenciales y transformada de LaplaceManuel Perez Villegas100% (1)
- Introducción a la matemática discretaDe EverandIntroducción a la matemática discretaCalificación: 5 de 5 estrellas5/5 (1)
- Documento CompletoDocumento204 páginasDocumento CompletoRenesito Misaael100% (1)
- Metodos Iterativos para Sistemas de Ecuaciones Lineales PDFDocumento61 páginasMetodos Iterativos para Sistemas de Ecuaciones Lineales PDFMaximiliano Antonio Ramirez NuñezAún no hay calificaciones
- Notas de Algebra Lineal MathematicaDocumento112 páginasNotas de Algebra Lineal MathematicaBruno Roldan100% (1)
- Algoritmos en Matlab AlexisDocumento145 páginasAlgoritmos en Matlab AlexisDuban MonroyAún no hay calificaciones
- Metodos de Krylov para Sistemas LinealesDocumento61 páginasMetodos de Krylov para Sistemas Linealesl21990324Aún no hay calificaciones
- Algoritmos Matlab MétodosDocumento145 páginasAlgoritmos Matlab MétodosNova Martinez ManuelAún no hay calificaciones
- Métodos numéricos aplicados a la ingeniería: Casos de estudio en ingeniería de procesos usando MATLAB®De EverandMétodos numéricos aplicados a la ingeniería: Casos de estudio en ingeniería de procesos usando MATLAB®Aún no hay calificaciones
- Electromagnetismo en MetalurgiaDocumento132 páginasElectromagnetismo en MetalurgiaHERMAN JR.Aún no hay calificaciones
- Libro de Modelos LinealesDocumento262 páginasLibro de Modelos LinealesSamuel MartinezAún no hay calificaciones
- Introducción al análisis de supervivencia avanzadaDe EverandIntroducción al análisis de supervivencia avanzadaAún no hay calificaciones
- Matematicas Basicas Guia de Trabajo IndependienteDocumento11 páginasMatematicas Basicas Guia de Trabajo IndependienteDanielMMAún no hay calificaciones
- Temario PDFDocumento132 páginasTemario PDFPabloPujalteAún no hay calificaciones
- Algebra Lineal: Michael Felipe Cifuentes Molano Marzo 2023Documento82 páginasAlgebra Lineal: Michael Felipe Cifuentes Molano Marzo 2023Michael CifuentesAún no hay calificaciones
- Razonamiento cuantitativo: Notas de claseDe EverandRazonamiento cuantitativo: Notas de claseCalificación: 5 de 5 estrellas5/5 (1)
- Inversacion Electronica-Mecatronica Parte1Documento20 páginasInversacion Electronica-Mecatronica Parte1Juddas KainAún no hay calificaciones
- Álgebra Lineal y Geometría I Problemas Resueltos: Publicaciones Electrónicas Sociedad Matemática MexicanaDocumento189 páginasÁlgebra Lineal y Geometría I Problemas Resueltos: Publicaciones Electrónicas Sociedad Matemática MexicanaYoiis FernandzAún no hay calificaciones
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- Álgebra LinealDocumento185 páginasÁlgebra LinealSergio Rodriguez MoralesAún no hay calificaciones
- Introducción Al Análisis Matemático Del Método de Elementos FinitosDocumento132 páginasIntroducción Al Análisis Matemático Del Método de Elementos FinitosAsangrana Sangrana100% (1)
- ML (Pages 1 - 57)Documento57 páginasML (Pages 1 - 57)David CáceresAún no hay calificaciones
- A Punt e Me Todos Numeric OsDocumento126 páginasA Punt e Me Todos Numeric OsAnonymous S9FeQUSIsQAún no hay calificaciones
- Scilab Análisis NuméricoDocumento39 páginasScilab Análisis NuméricoDimar Jose Jimenez DiazAún no hay calificaciones
- Edconmaxima PDFDocumento168 páginasEdconmaxima PDFSebastian LópezAún no hay calificaciones
- Una Propuesta para Resolver El Problema Del Agente Viajero Basado en Agrupamiento Por Cuadrantes y Su Implementación Usando MetaheurísticasDocumento146 páginasUna Propuesta para Resolver El Problema Del Agente Viajero Basado en Agrupamiento Por Cuadrantes y Su Implementación Usando MetaheurísticasGuillermo MedinaAún no hay calificaciones
- Fundamentos Matemáticos de Señales y SistemasDocumento337 páginasFundamentos Matemáticos de Señales y Sistemasatruque4487Aún no hay calificaciones
- VC Cap1Documento57 páginasVC Cap1Alex WTFAún no hay calificaciones
- Fundamentos Matemáticos de La Ingeniería - KindelanDocumento567 páginasFundamentos Matemáticos de La Ingeniería - KindelanJulian Prieto100% (1)
- Libro Ecuaciones DiferencialesDocumento331 páginasLibro Ecuaciones DiferencialesDaniela CumberAún no hay calificaciones
- C Mputo Cient Fico II Trabajo FinalDocumento77 páginasC Mputo Cient Fico II Trabajo FinalKarolina Padilla ValdezAún no hay calificaciones
- Curso elemental de probabilidad y estadísticaDocumento175 páginasCurso elemental de probabilidad y estadísticavictoria_2013Aún no hay calificaciones
- Curso Elemental de Probabilidad y EstadísticaDocumento175 páginasCurso Elemental de Probabilidad y EstadísticaSiriAún no hay calificaciones
- Señales y SistemasDocumento337 páginasSeñales y SistemasGustavo Rodriguez SalazarAún no hay calificaciones
- Algebra Lineal NumericaDocumento59 páginasAlgebra Lineal NumericaAndrés Tun100% (1)
- PROBLEMARIO DE ÁLGEBRA LINEAL Aarón Aparicio HernándezDocumento180 páginasPROBLEMARIO DE ÁLGEBRA LINEAL Aarón Aparicio HernándezAnabeatriz Alonso100% (10)
- Curso Elemental de Probabilidad y Estadística - UNAM PDFDocumento176 páginasCurso Elemental de Probabilidad y Estadística - UNAM PDFJuan BiassiniAún no hay calificaciones
- Lib Met Num ElectronicaDocumento185 páginasLib Met Num ElectronicaadalAún no hay calificaciones
- Libro Ecuaciones Diferenciales OrdinariasDocumento158 páginasLibro Ecuaciones Diferenciales Ordinariasjuanmartineznogales100% (1)
- Estudio Del Metodo Matricial en ArmadurasDocumento46 páginasEstudio Del Metodo Matricial en ArmadurasJesusJ.JacomeAún no hay calificaciones
- PDFDocumento109 páginasPDFHenry MolinaAún no hay calificaciones
- Curso elemental de probabilidad y estadísticaDocumento191 páginasCurso elemental de probabilidad y estadísticaCesar CamposAún no hay calificaciones
- Muñoz GJADocumento203 páginasMuñoz GJADavid HeraldoAún no hay calificaciones
- Introducción Al Algebra LinealDocumento252 páginasIntroducción Al Algebra LinealJEIMY GISELA VELANDIA GARCIAAún no hay calificaciones
- Depredador y PresaDocumento126 páginasDepredador y PresaanomiatotalAún no hay calificaciones
- Mamani - Análisis Semántico Latente Mediante Descomposición en Valores SingularesDocumento44 páginasMamani - Análisis Semántico Latente Mediante Descomposición en Valores SingularesErnesto CortesAún no hay calificaciones
- Apuntes Programacion 2 Metodos Numericos ESCOM IPN OKDocumento75 páginasApuntes Programacion 2 Metodos Numericos ESCOM IPN OKluigi_37Aún no hay calificaciones
- Fascgrado 9 EdiDocumento281 páginasFascgrado 9 EdialiciaAún no hay calificaciones
- Segunda Forma NormalDocumento4 páginasSegunda Forma Normalsolrac1308Aún no hay calificaciones
- HidrografiaDocumento14 páginasHidrografiasolrac1308Aún no hay calificaciones
- Cuarta Forma NormalDocumento4 páginasCuarta Forma Normalsolrac1308Aún no hay calificaciones
- Quinta Forma NormalDocumento3 páginasQuinta Forma Normalsolrac1308Aún no hay calificaciones
- Forma Normal de Dominio ClaveDocumento2 páginasForma Normal de Dominio Clavesolrac1308Aún no hay calificaciones
- Pallete Abre El Mobile World Congress Defendiendo El Papel de Las Telecos - Sin Nosotros No Hay Futuro DigitalDocumento5 páginasPallete Abre El Mobile World Congress Defendiendo El Papel de Las Telecos - Sin Nosotros No Hay Futuro Digitalsolrac1308Aún no hay calificaciones
- Tercera Forma NormalDocumento4 páginasTercera Forma Normalsolrac1308Aún no hay calificaciones
- Álgebra Lineal en Física e Instrumentación Espacial: Textos Universitarios CienciasDocumento25 páginasÁlgebra Lineal en Física e Instrumentación Espacial: Textos Universitarios Cienciassolrac1308Aún no hay calificaciones
- Primos Compuestos PDFDocumento8 páginasPrimos Compuestos PDFwilly huarcayaAún no hay calificaciones
- Numeros PrimosDocumento6 páginasNumeros PrimosJavier Portillo PerezAún no hay calificaciones
- (ES) Sintáxis Básica de C++ (Parte 3) - Jorge JaraDocumento9 páginas(ES) Sintáxis Básica de C++ (Parte 3) - Jorge Jarasolrac1308Aún no hay calificaciones
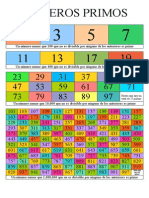
- Primos PosterDocumento1 páginaPrimos PosterAlicia CarballudeAún no hay calificaciones
- Imagen DigitalDocumento32 páginasImagen DigitalRayén Fusco FígoliAún no hay calificaciones
- Guia TFG MatematicasDocumento28 páginasGuia TFG Matematicassolrac1308Aún no hay calificaciones
- EconofisicaDocumento8 páginasEconofisicaSanti SlvAún no hay calificaciones
- 13 PDFDocumento11 páginas13 PDFsita_yanisAún no hay calificaciones
- Introducción a Haskell: Guía Completa para PrincipiantesDocumento274 páginasIntroducción a Haskell: Guía Completa para PrincipiantesHarold Aponte100% (1)
- Guia Basica CmakeDocumento5 páginasGuia Basica CmakeCarlos Edgar Buitron QuispeAún no hay calificaciones
- 1337161274alimentos EcologicosDocumento5 páginas1337161274alimentos Ecologicossolrac1308Aún no hay calificaciones
- Arquitecturas software para la nube: MicroserviciosDocumento83 páginasArquitecturas software para la nube: Microserviciossolrac1308Aún no hay calificaciones
- InstalarQt y Hacer Programa en CDocumento21 páginasInstalarQt y Hacer Programa en CFranciscoAún no hay calificaciones
- Videojuegos Multiplataforma con OpenFLDocumento252 páginasVideojuegos Multiplataforma con OpenFLMipel24Aún no hay calificaciones
- La cuarta dimensión: ¿idea esotérica o científicaDocumento6 páginasLa cuarta dimensión: ¿idea esotérica o científicaGC JulioAún no hay calificaciones
- ReactoresDocumento9 páginasReactoressolrac1308Aún no hay calificaciones
- La Física Cuántica Cambiará Nuestras VidasDocumento6 páginasLa Física Cuántica Cambiará Nuestras Vidassolrac1308Aún no hay calificaciones
- Manual ClipsDocumento30 páginasManual ClipsMaria Soledad PetrinoAún no hay calificaciones
- ScalaTutorial Es ESDocumento15 páginasScalaTutorial Es ESEmilio Alberto Oropeza ZuritaAún no hay calificaciones
- Guía de Estilo para La Programación en C en Arquitectura de SistemasDocumento5 páginasGuía de Estilo para La Programación en C en Arquitectura de Sistemassolrac1308Aún no hay calificaciones
- Precios Ade 2019 UNEDDocumento2 páginasPrecios Ade 2019 UNEDLauAún no hay calificaciones
- Criterio de Jury Con RetroalimentaciónDocumento9 páginasCriterio de Jury Con RetroalimentaciónHerlan Ricardo Ortuño PasquierAún no hay calificaciones
- Álgebra MaxiDocumento20 páginasÁlgebra MaxiDany MamaniAún no hay calificaciones
- Automatica-Ejercicios de Transform Ada Inversa de LaplaceDocumento28 páginasAutomatica-Ejercicios de Transform Ada Inversa de LaplaceJose Antonio Fernández GarcíaAún no hay calificaciones
- Semana 4 ALGEBRADocumento6 páginasSemana 4 ALGEBRAMoisés MarcaAún no hay calificaciones
- Actividad de Aprendizaje Unidad 2 Fundamentos de Matematicas AngyDocumento13 páginasActividad de Aprendizaje Unidad 2 Fundamentos de Matematicas AngyANGY KARINA NARANJO POLOAún no hay calificaciones
- Cadenas de Markov de nacimiento y muerteDocumento5 páginasCadenas de Markov de nacimiento y muerteElComandateAún no hay calificaciones
- Operaciones Con Matrices en Lenguaje CDocumento11 páginasOperaciones Con Matrices en Lenguaje Ctrino_sgAún no hay calificaciones
- Inecuaciones Definición y EjemplosDocumento20 páginasInecuaciones Definición y EjemplosJuan Manuel BolivarAún no hay calificaciones
- 1.-Agenda Semana 3 (9no Egb)Documento16 páginas1.-Agenda Semana 3 (9no Egb)Priscila MosqueraAún no hay calificaciones
- Resueltos C3 2008Documento13 páginasResueltos C3 2008Fran PolancoAún no hay calificaciones
- Metodo GráficoDocumento10 páginasMetodo GráficoCarlos MedranoAún no hay calificaciones
- Algebra Lineal Actividad Semana 02Documento7 páginasAlgebra Lineal Actividad Semana 02Cristi ChavezAún no hay calificaciones
- Operaciones Básicas Con Vectores, Fuerzas Concurrentes y Equil de Partícula FcaDocumento47 páginasOperaciones Básicas Con Vectores, Fuerzas Concurrentes y Equil de Partícula FcaNilton AbAún no hay calificaciones
- Ejercicios de Variable Aleatoria Discreta TONYDocumento8 páginasEjercicios de Variable Aleatoria Discreta TONYPiero Mendoza CasanovaAún no hay calificaciones
- Laboratorio 4 de MatbalDocumento2 páginasLaboratorio 4 de MatbalDiegoRonaldoChiBalAún no hay calificaciones
- Método de Aproximaciones SucesivasDocumento13 páginasMétodo de Aproximaciones SucesivasLina Denisse Macias MartinezAún no hay calificaciones
- Minimos CuadradosDocumento7 páginasMinimos CuadradosJosue CarmonaAún no hay calificaciones
- Propiedades de Las Derivadas y Problemas de Optimizacion M5Documento40 páginasPropiedades de Las Derivadas y Problemas de Optimizacion M5Miguel CañasAún no hay calificaciones
- Aritmetica 4 Secundaria 2unidadDocumento9 páginasAritmetica 4 Secundaria 2unidadjlls21100% (1)
- MT 064 SolucionDocumento24 páginasMT 064 SolucionhectorAún no hay calificaciones
- Formulario Calculo II Janson Rojas HDocumento2 páginasFormulario Calculo II Janson Rojas HNicolás Prieto CórdovaAún no hay calificaciones
- Proporcion GeometricaDocumento3 páginasProporcion GeometricaNoemi Guillermo TrinidadAún no hay calificaciones
- Resolución de Ejercicios - TP Repaso Análisis Matemático 1Documento8 páginasResolución de Ejercicios - TP Repaso Análisis Matemático 1The mato712Aún no hay calificaciones
- Examenes y Practicas de Matemática I Johan de La Vega Ambrosio v1Documento16 páginasExamenes y Practicas de Matemática I Johan de La Vega Ambrosio v1johan de la vega ambrosioAún no hay calificaciones
- Funciones Reales y AplicacionesDocumento14 páginasFunciones Reales y AplicacionesAldoAún no hay calificaciones
- C) Problemas de Razones de CambioDocumento12 páginasC) Problemas de Razones de CambioWilmer MartinezAún no hay calificaciones
- Problemario de Cálculo MultivariableDocumento33 páginasProblemario de Cálculo MultivariableJerry Flowers SoadAún no hay calificaciones
- 01 Ecuaciones Diferenciales Lineales de Primer OrdenDocumento45 páginas01 Ecuaciones Diferenciales Lineales de Primer OrdenArturoAún no hay calificaciones
- Producción mensual de motores por modelo y colorDocumento29 páginasProducción mensual de motores por modelo y colorLuz OrtizAún no hay calificaciones
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoDe EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoAún no hay calificaciones
- Cuántica: Qué significa la teoría de la ciencia más extrañaDe EverandCuántica: Qué significa la teoría de la ciencia más extrañaCalificación: 1 de 5 estrellas1/5 (1)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- El cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteDe EverandEl cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteCalificación: 4 de 5 estrellas4/5 (5)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Matemáticas financierasDe EverandMatemáticas financierasCalificación: 4 de 5 estrellas4/5 (7)
- Análisis estadístico de datos multivariadosDe EverandAnálisis estadístico de datos multivariadosCalificación: 5 de 5 estrellas5/5 (1)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)