También podría gustarte
- Dinamica EjerciciosDocumento67 páginasDinamica EjerciciosBetterWolf777100% (1)
- Modelo Matematico de Sistemas DinamicosDocumento23 páginasModelo Matematico de Sistemas Dinamicoshehc97123275% (4)
- Maquina de Atwood Lagrange PDFDocumento2 páginasMaquina de Atwood Lagrange PDFAnonymous 91iAPBAún no hay calificaciones
- Documento 1 PDFDocumento4 páginasDocumento 1 PDFmiguelAún no hay calificaciones
- Ejemplo Proyecto Analisis NumericoDocumento19 páginasEjemplo Proyecto Analisis NumericotomAún no hay calificaciones
- Método de Lagrange en Mecanica y OndasDocumento20 páginasMétodo de Lagrange en Mecanica y Ondasdwyer2403Aún no hay calificaciones
- Formalismo de LagrangeDocumento12 páginasFormalismo de LagrangeCristin LeeAún no hay calificaciones
- Dinamica EjerciciosDocumento67 páginasDinamica EjerciciosUstariz Heredia Diego Armando100% (1)
- Modelos Matemáticos Usando Ecuaciones de LagrangeDocumento18 páginasModelos Matemáticos Usando Ecuaciones de Lagrangemasb2900983% (6)
- Ejercicios Resueltos de Mecánica ClásicaDocumento195 páginasEjercicios Resueltos de Mecánica ClásicaJimmy Tapia VasquezAún no hay calificaciones
- Desarrollo de Sistemas Dinámicos Animados en MatlabDocumento8 páginasDesarrollo de Sistemas Dinámicos Animados en MatlabDanielOlmedoNavarreteAún no hay calificaciones
- Guia 1Documento9 páginasGuia 1Juan ZetaAún no hay calificaciones
- Fase 3 - Hector JímenezDocumento16 páginasFase 3 - Hector JímenezDiego CarranzaAún no hay calificaciones
- Dinamica de Brazo de RobotDocumento11 páginasDinamica de Brazo de RobotJulio Cesar Gonzalez GarciaAún no hay calificaciones
- Tarea1 (2020 I)Documento4 páginasTarea1 (2020 I)Matias Montenegro MancillaAún no hay calificaciones
- Mecánica Lagrangiana y HamiltonianaDocumento45 páginasMecánica Lagrangiana y HamiltonianaleenivramAún no hay calificaciones
- Ecuacion de LagrangeDocumento7 páginasEcuacion de LagrangeMaria Julia Sanches VeraAún no hay calificaciones
- Tarea 1 - PuataDocumento10 páginasTarea 1 - PuataLiz CabreraAún no hay calificaciones
- Desarrollo de Sistemas Dinámicos Animados en MatlabDocumento8 páginasDesarrollo de Sistemas Dinámicos Animados en MatlabDaniel OlmedoAún no hay calificaciones
- Ecuaciones de LagrangeDocumento5 páginasEcuaciones de LagrangeAnthony HuacachiAún no hay calificaciones
- Las Ecuaciones de LagrangeDocumento4 páginasLas Ecuaciones de LagrangeAR MaryAún no hay calificaciones
- Modelo Dinamico Formulacion de Lagrange EulerDocumento17 páginasModelo Dinamico Formulacion de Lagrange EulerAngel LojanoAún no hay calificaciones
- Control de Un Robot Tipo RRDocumento10 páginasControl de Un Robot Tipo RRzeuszetaAún no hay calificaciones
- Practica#3Documento5 páginasPractica#3Elsy Maely Noriega MoralesAún no hay calificaciones
- Semana 3Documento9 páginasSemana 3Alex Ivan Mamani MamaniAún no hay calificaciones
- Vibraciones UiiDocumento17 páginasVibraciones UiiEmmanuel GuzmánAún no hay calificaciones
- Tarea 2Documento5 páginasTarea 2roberto rojasAún no hay calificaciones
- Informe EdoDocumento2 páginasInforme EdoLuis AngelAún no hay calificaciones
- Primer Final 2019Documento2 páginasPrimer Final 2019Carlos MendezAún no hay calificaciones
- Tarea Del Pendulo InvertidoDocumento26 páginasTarea Del Pendulo InvertidoLevisAún no hay calificaciones
- Funciones de TransferenciaDocumento11 páginasFunciones de TransferenciaKevin MoralesAún no hay calificaciones
- Resultado de Aprendizaje Unidad 2 MatematicasDocumento8 páginasResultado de Aprendizaje Unidad 2 Matematicasmario alberto vasquez ramirezAún no hay calificaciones
- Maquina de Adwood (Cronolab)Documento4 páginasMaquina de Adwood (Cronolab)Andres CampoAún no hay calificaciones
- Ejemplos de Funcion de Transferencia PDFDocumento5 páginasEjemplos de Funcion de Transferencia PDFKelvin Ponce100% (4)
- Matriz Jacobiana de Un RobotDocumento6 páginasMatriz Jacobiana de Un RobotgloretogAún no hay calificaciones
- Sistema M-R-ADocumento4 páginasSistema M-R-Aluis angelAún no hay calificaciones
- Ecuaciones de LagrangeDocumento9 páginasEcuaciones de LagrangeAlejandro CardenasAún no hay calificaciones
- Modelado Estructural para Sistemas Mecatrónicos: Bond GraphDocumento17 páginasModelado Estructural para Sistemas Mecatrónicos: Bond GraphDanielAún no hay calificaciones
- U 10 Vibraciones 2 GDL 2019Documento49 páginasU 10 Vibraciones 2 GDL 2019Augusto EspinozaAún no hay calificaciones
- Lagrange MechanicsDocumento8 páginasLagrange Mechanicsjesuslopez_mecaAún no hay calificaciones
- Fase3 ModeladoDocumento19 páginasFase3 Modeladokevin narvaez henriquezAún no hay calificaciones
- Trasformada de LaplaceDocumento3 páginasTrasformada de LaplaceRicardo LópezAún no hay calificaciones
- Euler Lagrange Equipo 5Documento10 páginasEuler Lagrange Equipo 5Alexis L.M.Aún no hay calificaciones
- Bola Ensartada en Un AroDocumento9 páginasBola Ensartada en Un AroAlonso-GuerreroAún no hay calificaciones
- Clase 04. Ecuaciones de Lagrange. Casos y TeoriaDocumento36 páginasClase 04. Ecuaciones de Lagrange. Casos y Teoriarodrigornv33Aún no hay calificaciones
- Catenaria PDFDocumento6 páginasCatenaria PDFfer_esAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Transformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.De EverandTransformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Aún no hay calificaciones
- Prueba de Cointegración de JohansenDocumento3 páginasPrueba de Cointegración de JohansenDenilsxn MioAún no hay calificaciones
- Elementos Basicos para El Analisis de Los Sistemas de PotenciaDocumento22 páginasElementos Basicos para El Analisis de Los Sistemas de Potenciael_ruso__83100% (1)
- Proceso de Diseño en IngenieriaDocumento9 páginasProceso de Diseño en IngenieriaJesus David Rhenals JulioAún no hay calificaciones
- Guia Formativa REFRIGERACION 11, CECyTEH Gobierno Hidalgo 2012Documento102 páginasGuia Formativa REFRIGERACION 11, CECyTEH Gobierno Hidalgo 2012Nan Mejia Tlaka50% (4)
- Informe de SecadoDocumento20 páginasInforme de SecadoStephen MillerAún no hay calificaciones
- Clase IR PDFDocumento41 páginasClase IR PDFGaston GomezAún no hay calificaciones
- 2Documento7 páginas2Jefersson achicanoy arciniegasAún no hay calificaciones
- 1.3.1 Extremos de Una FuncionDocumento6 páginas1.3.1 Extremos de Una FuncionRuben LaraAún no hay calificaciones
- Analisis e Interpretacion de PlanosDocumento54 páginasAnalisis e Interpretacion de PlanosAlejandro VelazquezAún no hay calificaciones
- Actividad Pelicula PiDocumento3 páginasActividad Pelicula PijmjmtrabajoAún no hay calificaciones
- Unidad II. Funciones de Varias VariablesDocumento22 páginasUnidad II. Funciones de Varias Variablescarlosp7682Aún no hay calificaciones
- Manual de Instalacià N A6300 V3FL V9Documento56 páginasManual de Instalacià N A6300 V3FL V9Rafael BrunoAún no hay calificaciones
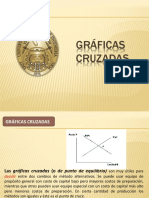
- 4.4. - Gráficas CruzadasDocumento22 páginas4.4. - Gráficas Cruzadasluis leon alvaradoAún no hay calificaciones
- Promocion de La Salud en El TrabajoDocumento12 páginasPromocion de La Salud en El TrabajoMarcoAGEAún no hay calificaciones
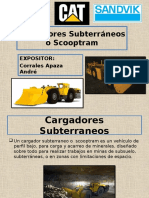
- Cargador Subterraneo ScooptramDocumento39 páginasCargador Subterraneo ScooptramYohnny Daniel MR100% (1)
- Modulo 2 UltrasonidosDocumento82 páginasModulo 2 UltrasonidoserwincalvoAún no hay calificaciones
- Modulo 7 QuímicaDocumento16 páginasModulo 7 QuímicaBrayan Quijano BritoAún no hay calificaciones
- Informe de Clasificacion de SuelosDocumento19 páginasInforme de Clasificacion de SuelosLeyner Osvaldo Calva Herrera75% (4)
- Cascos de Protección para La IndustriaDocumento27 páginasCascos de Protección para La IndustriaEniray MarínAún no hay calificaciones
- Programa IBIO2250 2017-10Documento4 páginasPrograma IBIO2250 2017-10Santiago Cifuentes AlmanzaAún no hay calificaciones
- Taller 7 ElectricidadDocumento2 páginasTaller 7 ElectricidadKjkljk KjkljklAún no hay calificaciones
- Proyecto FinalDocumento48 páginasProyecto FinalEdison David OrtizAún no hay calificaciones
- Labs2 13 Karina JacomeDocumento20 páginasLabs2 13 Karina JacomeKarinaJácomeAún no hay calificaciones
- Espectrofotómetro de Transformada de FourierDocumento3 páginasEspectrofotómetro de Transformada de FourierRooBudibAún no hay calificaciones
- Mapa Conceptual de Estadística DescriptivaDocumento1 páginaMapa Conceptual de Estadística DescriptivaLuis0% (1)
- Mecánica Cuántica-El Espacio-Posición y El Espacio-Momentum IIDocumento18 páginasMecánica Cuántica-El Espacio-Posición y El Espacio-Momentum IIAraujo ThiagoAún no hay calificaciones
- Pit Ot GrupoDocumento17 páginasPit Ot GrupoGERALDINE TORIBIOAún no hay calificaciones
- Guia Diseño Urbano y Vialidad FINALDocumento213 páginasGuia Diseño Urbano y Vialidad FINALEDU100% (4)
- Dragerft Pss-bg4 EsDocumento8 páginasDragerft Pss-bg4 EsUriel Placido Jacho PachaAún no hay calificaciones
- Practica 4 Circuitos Segundo OrdenDocumento27 páginasPractica 4 Circuitos Segundo OrdenSulpick BarbellaAún no hay calificaciones