También podría gustarte
- Administración de redes LAN. Ejercicios prácticos con GNS3De EverandAdministración de redes LAN. Ejercicios prácticos con GNS3Aún no hay calificaciones
- El camino a las redes neuronales artificialesDe EverandEl camino a las redes neuronales artificialesAún no hay calificaciones
- Diseño Infraestructura Computacion Alto RendimientoDocumento15 páginasDiseño Infraestructura Computacion Alto RendimientoAndrs AlvearAún no hay calificaciones
- Diseño Infraestructura Computacion Alto RendimientoDocumento15 páginasDiseño Infraestructura Computacion Alto RendimientoDILIO JOS� QUISPE MART�NEZAún no hay calificaciones
- Generación Creativa 2012-58-59Documento2 páginasGeneración Creativa 2012-58-59DILIO JOS� QUISPE MART�NEZAún no hay calificaciones
- Conceptos de Paralelismo - García García Andrea - López Zurita Heriberto LuisDocumento5 páginasConceptos de Paralelismo - García García Andrea - López Zurita Heriberto LuisAndrea Garcia GarciaAún no hay calificaciones
- Actividad 1.1.1Documento14 páginasActividad 1.1.1luisAún no hay calificaciones
- Tipos de Computación ParalelaDocumento33 páginasTipos de Computación Paralelamorris starAún no hay calificaciones
- Report 19Documento19 páginasReport 19Fredis CanteroAún no hay calificaciones
- Fundamentos de La Arquitectura Del Computador - Abisai HerreraDocumento19 páginasFundamentos de La Arquitectura Del Computador - Abisai HerreraAbi HerreraAún no hay calificaciones
- Grupo 4 Lab1Documento9 páginasGrupo 4 Lab1Aldair RoblesAún no hay calificaciones
- Actividad 10 Programacion IIDocumento13 páginasActividad 10 Programacion IIOsmanAún no hay calificaciones
- Capitulo-6 Computacion Paralela ClustersDocumento26 páginasCapitulo-6 Computacion Paralela ClustersmemfilmatAún no hay calificaciones
- PDC - Etapa de Reconocimiento TTDocumento10 páginasPDC - Etapa de Reconocimiento TTYanedi Parra VargasAún no hay calificaciones
- Estado de ArteDocumento3 páginasEstado de ArtelisbrtreosAún no hay calificaciones
- Formativo 3 Investigar Cual Es La Clasificación de Los Sistemas Según Su Capacidad de Procesamiento Paralelo - 7245Documento15 páginasFormativo 3 Investigar Cual Es La Clasificación de Los Sistemas Según Su Capacidad de Procesamiento Paralelo - 7245carlos chiAún no hay calificaciones
- Introducción A Las Ciencias ComputacionalesDocumento38 páginasIntroducción A Las Ciencias ComputacionalesCarlos Alberto More MartinezAún no hay calificaciones
- Algoritmo en Programación ParalelaDocumento9 páginasAlgoritmo en Programación ParalelaLucas CibercityAún no hay calificaciones
- Acoplamiento de Computadoras - Clúster (Informática)Documento12 páginasAcoplamiento de Computadoras - Clúster (Informática)Julio Cesar GarciaAún no hay calificaciones
- 6.1 MATLAB - Neural Network ToolboxDocumento8 páginas6.1 MATLAB - Neural Network ToolboxEdwin AguilarAún no hay calificaciones
- Escenario1 Politecnico Arquitectura de HardwareDocumento12 páginasEscenario1 Politecnico Arquitectura de HardwareCarlos Augusto Sabino Cañizares100% (1)
- Introduccion A La Computacion ParalelaDocumento26 páginasIntroduccion A La Computacion ParalelaArismendy RodriguezAún no hay calificaciones
- Tarea 1 Logica Computacional. 28-10-2022Documento2 páginasTarea 1 Logica Computacional. 28-10-2022Jose Miguel Aquino CastilloAún no hay calificaciones
- Tarea32020168932rubenalford 221019233814 D848f1afDocumento10 páginasTarea32020168932rubenalford 221019233814 D848f1afArnold Anaya PulidoAún no hay calificaciones
- EPN FIS Algoritmos NuméricosDocumento6 páginasEPN FIS Algoritmos NuméricosLilly LunitaAún no hay calificaciones
- Entrega 3Documento18 páginasEntrega 3Gabo FrancoAún no hay calificaciones
- Lectura Fundamental 1Documento11 páginasLectura Fundamental 1Jose RodriguezAún no hay calificaciones
- Udx042020123 Ac Aa 1 1Documento15 páginasUdx042020123 Ac Aa 1 1fruityloops10Aún no hay calificaciones
- Aplicacion Del Software Matlab en Planeamiento de MinadoDocumento32 páginasAplicacion Del Software Matlab en Planeamiento de MinadoneysserAún no hay calificaciones
- Manual Básico de MATLABDocumento17 páginasManual Básico de MATLABAlberto ReyAún no hay calificaciones
- Tutorial Intermedio CALCULIXDocumento19 páginasTutorial Intermedio CALCULIXSebas LCAún no hay calificaciones
- Cisneros Sánchez Héctor Fabricio 19110122 3M Ingeniería en Desarrollo de Software "Computación Distribuida y Paralela"Documento9 páginasCisneros Sánchez Héctor Fabricio 19110122 3M Ingeniería en Desarrollo de Software "Computación Distribuida y Paralela"Fabricio CisnerosAún no hay calificaciones
- Nodos HPC PDFDocumento12 páginasNodos HPC PDFManuel Avellaneda FloresAún no hay calificaciones
- Primer Parcial - Computacion - ParalelaDocumento27 páginasPrimer Parcial - Computacion - ParalelaArismendy RodriguezAún no hay calificaciones
- Actividad - 9 - MATLABDocumento15 páginasActividad - 9 - MATLABDavid A Rodriguez SanchezAún no hay calificaciones
- Programacion en ParaleloDocumento11 páginasProgramacion en Paralelojorge.mora699Aún no hay calificaciones
- Eficiencia en Algoritmos Paralelos - BrisDocumento17 páginasEficiencia en Algoritmos Paralelos - Brisjavier_brisAún no hay calificaciones
- Manual Toolkit de EpanetDocumento15 páginasManual Toolkit de EpanetLuis Daniel Gomez CastañoAún no hay calificaciones
- El Uso de La Hoja de Calculo PDFDocumento12 páginasEl Uso de La Hoja de Calculo PDFAdn GtAún no hay calificaciones
- Procesamiento Distribuido y Paralelo. Fundamentos, Métricas y AplicacionesDocumento16 páginasProcesamiento Distribuido y Paralelo. Fundamentos, Métricas y Aplicacionesdaniel camAún no hay calificaciones
- Sistemas Expertos o Inteligencia Artificial y Redes NeuronalesDocumento8 páginasSistemas Expertos o Inteligencia Artificial y Redes NeuronalesAriel Alejandro WagnerAún no hay calificaciones
- MATLAB en La IngenieriaDocumento10 páginasMATLAB en La IngenieriaOmar Roy CB100% (1)
- Arquitectura en ParaleloDocumento4 páginasArquitectura en ParaleloJamersAún no hay calificaciones
- Microsoft Word - UNLZ MatLab SimulinK AMM 2007Documento361 páginasMicrosoft Word - UNLZ MatLab SimulinK AMM 2007franco_2010Aún no hay calificaciones
- Cálculo Numérico Apuntes 2020Documento109 páginasCálculo Numérico Apuntes 2020Juan Francisco GiordanoAún no hay calificaciones
- Programación Concurrente y Distribuida: Nombre: Kraenau Rodriguez, Diego Armando (U201710397)Documento13 páginasProgramación Concurrente y Distribuida: Nombre: Kraenau Rodriguez, Diego Armando (U201710397)diego kraenauAún no hay calificaciones
- Glosario Programacion ParalelaDocumento7 páginasGlosario Programacion ParalelaGustavo Del AngelAún no hay calificaciones
- Mpi PDFDocumento10 páginasMpi PDFJulio GonzalezAún no hay calificaciones
- Aspectos Basicos de La Computacion Paralela y DistribuidaDocumento10 páginasAspectos Basicos de La Computacion Paralela y Distribuidaluis hernandez100% (1)
- Sistemas ParalelosDocumento4 páginasSistemas ParalelosCesar RiosAún no hay calificaciones
- 4.5 Casos de EstudioDocumento5 páginas4.5 Casos de EstudioSilvio Dresser0% (1)
- Resumen Sobre Cluster de Alto RendimientoDocumento6 páginasResumen Sobre Cluster de Alto RendimientoCarlos AbramovichAún no hay calificaciones
- Escalabilidad y Balance de Carga en Sistemas Paralelos: Marcelo Naiouf, Armando de GiustiDocumento4 páginasEscalabilidad y Balance de Carga en Sistemas Paralelos: Marcelo Naiouf, Armando de GiustiJoelAún no hay calificaciones
- Aplicación Del Software Matlab en Planeamiento de MinadoDocumento32 páginasAplicación Del Software Matlab en Planeamiento de MinadoHugo UrquizoAún no hay calificaciones
- Programacion en ParaleloDocumento45 páginasProgramacion en ParaleloJose Antonio Cruz Sanchez100% (1)
- Análisis de datos con Power Bi, R-Rstudio y KnimeDe EverandAnálisis de datos con Power Bi, R-Rstudio y KnimeAún no hay calificaciones
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Mecatrónica - sistemas de control electrónico en la ingeniería mecánica y eléctricaDe EverandMecatrónica - sistemas de control electrónico en la ingeniería mecánica y eléctricaCalificación: 5 de 5 estrellas5/5 (3)
- Curso de Programación con Java - 2ª EdiciónDe EverandCurso de Programación con Java - 2ª EdiciónCalificación: 4.5 de 5 estrellas4.5/5 (2)
- La Teor Ia de Morales-Ramis y El Algoritmo de KovacicDocumento36 páginasLa Teor Ia de Morales-Ramis y El Algoritmo de KovacicMétodos NuméricosAún no hay calificaciones
- Cuatro Poemas Matem Aticos: Alal IneaDocumento3 páginasCuatro Poemas Matem Aticos: Alal IneaMétodos NuméricosAún no hay calificaciones
- Un M Etodo Matricial para El C Alculo de La Constante de Olson K Baric EntricaDocumento13 páginasUn M Etodo Matricial para El C Alculo de La Constante de Olson K Baric EntricaMétodos NuméricosAún no hay calificaciones
- Apuntes Sobre La Contribuci On Espa Nola A Las Matem AticasDocumento35 páginasApuntes Sobre La Contribuci On Espa Nola A Las Matem AticasMétodos NuméricosAún no hay calificaciones
- Lecturas Matemáticas: Maricarmen Martínez Carlos E. MejíaDocumento3 páginasLecturas Matemáticas: Maricarmen Martínez Carlos E. MejíaMétodos NuméricosAún no hay calificaciones
- Índice Del Volumen 42, 2021: Lvarez OsefinaDocumento1 páginaÍndice Del Volumen 42, 2021: Lvarez OsefinaMétodos NuméricosAún no hay calificaciones
- El Corazón de Un Espacio de Alexandroff: The Core of An Alexandroff SpaceDocumento21 páginasEl Corazón de Un Espacio de Alexandroff: The Core of An Alexandroff SpaceMétodos NuméricosAún no hay calificaciones
- LeslieDocumento13 páginasLeslieMétodos NuméricosAún no hay calificaciones
- NoticiasDocumento1 páginaNoticiasMétodos NuméricosAún no hay calificaciones
- Introducción A Los D-Módulos: An Introduction To D-ModulesDocumento26 páginasIntroducción A Los D-Módulos: An Introduction To D-ModulesMétodos NuméricosAún no hay calificaciones
- Holling IIDocumento16 páginasHolling IIMétodos NuméricosAún no hay calificaciones
- Pensamiento AlgebraicoDocumento21 páginasPensamiento AlgebraicoMétodos NuméricosAún no hay calificaciones
- Destrezas BlandasDocumento10 páginasDestrezas BlandasMétodos NuméricosAún no hay calificaciones
- HolaDocumento1 páginaHolaMétodos NuméricosAún no hay calificaciones
- HolaDocumento1 páginaHolaMétodos NuméricosAún no hay calificaciones
- Opt Eco ProgDocumento1 páginaOpt Eco ProgMétodos NuméricosAún no hay calificaciones
- PruebaDocumento1 páginaPruebaMétodos NuméricosAún no hay calificaciones
- HolaDocumento1 páginaHolaMétodos NuméricosAún no hay calificaciones
- MozillaDocumento4 páginasMozillaMétodos NuméricosAún no hay calificaciones
- Posible Distribucion de ContenidosDocumento2 páginasPosible Distribucion de ContenidosNatalia DiazAún no hay calificaciones
- Problema Ejemplo de SaponificaciónDocumento212 páginasProblema Ejemplo de SaponificaciónDaniel ValdiviaAún no hay calificaciones
- Monitor CRTDocumento3 páginasMonitor CRTbelkysAún no hay calificaciones
- REGLAMENTO (Resolucion 76 - 20 SIP)Documento88 páginasREGLAMENTO (Resolucion 76 - 20 SIP)shoker4Aún no hay calificaciones
- Qué Es Un Sistema Operativo Topo 2017Documento4 páginasQué Es Un Sistema Operativo Topo 2017Elvis SamAún no hay calificaciones
- Plan Estratégico de Tecnologías de Información de PerupetroDocumento27 páginasPlan Estratégico de Tecnologías de Información de PerupetroiTzSydAún no hay calificaciones
- Matriz de ActividadesDocumento4 páginasMatriz de ActividadesNELY ARCIBIA ALBARADO0% (1)
- Ejercicios de Media ResueltosDocumento14 páginasEjercicios de Media ResueltosLuz Haydee100% (1)
- Definiciones de Conceptos MDDocumento2 páginasDefiniciones de Conceptos MDAlexaplay ツAún no hay calificaciones
- Catalogación de Materiales IniciomDocumento8 páginasCatalogación de Materiales IniciomDiego Yapapasca PAún no hay calificaciones
- Analizador Sintactico LL y LRDocumento3 páginasAnalizador Sintactico LL y LRFrank RecinosAún no hay calificaciones
- Necesidad de Grupo Electrogeno en Locales Comerciales Guia - BT - 28 - Mar15r3Documento1 páginaNecesidad de Grupo Electrogeno en Locales Comerciales Guia - BT - 28 - Mar15r3Jose Vicente Torregrosa GarciaAún no hay calificaciones
- Frecuencias Talkabout PDFDocumento3 páginasFrecuencias Talkabout PDFMarcos R. SalazarAún no hay calificaciones
- FERRE-GALLI-MATTJE - Álgebra y Geometría. Una Manera de Pensar - pdf-PDFADocumento868 páginasFERRE-GALLI-MATTJE - Álgebra y Geometría. Una Manera de Pensar - pdf-PDFAAndres BeltranAún no hay calificaciones
- 04C BQ GP 7 Kenji Chung SanchezDocumento3 páginas04C BQ GP 7 Kenji Chung SanchezKenji Alberto Chung SanchezAún no hay calificaciones
- Ayudantía ROT RCDocumento7 páginasAyudantía ROT RCRichard Orellana AguirreAún no hay calificaciones
- 1GA Empresa y AdministraciónDocumento34 páginas1GA Empresa y AdministraciónMaryAún no hay calificaciones
- Laboratorio 2Documento13 páginasLaboratorio 2Santiago MoralesAún no hay calificaciones
- Silabo de Gestión de Sistemas InformáticosDocumento5 páginasSilabo de Gestión de Sistemas Informáticosroland_yossefAún no hay calificaciones
- Morocho-Sanchez Practica 7Documento13 páginasMorocho-Sanchez Practica 7Wilson MorochoAún no hay calificaciones
- Competencias e Indicadores de Evaluación de Matemática 3° Grado.Documento6 páginasCompetencias e Indicadores de Evaluación de Matemática 3° Grado.Gustavo E. Gómez F.91% (69)
- Asignacion 2Documento27 páginasAsignacion 2Gerald AburtoAún no hay calificaciones
- Inbound Marketing PDFDocumento32 páginasInbound Marketing PDFjulianAún no hay calificaciones
- Probabilidades de EventosDocumento5 páginasProbabilidades de Eventosiborella999Aún no hay calificaciones
- BitacoraDocumento4 páginasBitacoraEnrique Verdi CruzAún no hay calificaciones
- Fijacion en 3 DimensionesDocumento6 páginasFijacion en 3 DimensionesJorge A. Chuley Martínez100% (1)
- Autoevaluación 1 - CALCULO PARA LA TOMA DE DECISIONES (4450)Documento5 páginasAutoevaluación 1 - CALCULO PARA LA TOMA DE DECISIONES (4450)Henry Max Kevin Grados Casana67% (3)
- Tratamiento de DisartriasDocumento15 páginasTratamiento de DisartriasSuan CofréAún no hay calificaciones
- Pedido de MP Cima 1Documento8 páginasPedido de MP Cima 1Luis Enrique Farfan ChaupisAún no hay calificaciones
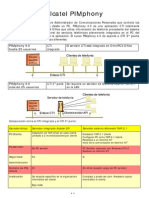
- 06 2 PimphonyDocumento6 páginas06 2 PimphonySamuel Mares PalafoxAún no hay calificaciones
- Inteligencia ArtificialDocumento31 páginasInteligencia Artificialkarenleon2589% (9)
- Accidente Laboral 3Documento3 páginasAccidente Laboral 3M Laura VasquezAún no hay calificaciones