También podría gustarte
- Examen SO1 2017 Feb Mar Solucion PDFDocumento6 páginasExamen SO1 2017 Feb Mar Solucion PDFFlavioAún no hay calificaciones
- FSO 20190520 Ordinaria p2 Test SolucionesDocumento4 páginasFSO 20190520 Ordinaria p2 Test SolucionesHector BazarteAún no hay calificaciones
- Fundamentos de Los Sistemas Operativos Examen Parcial, 9 de Abril de 2018 Preguntas Del TestDocumento4 páginasFundamentos de Los Sistemas Operativos Examen Parcial, 9 de Abril de 2018 Preguntas Del TestBrenda Nahomi Quispe GonzalesAún no hay calificaciones
- Examenes Final SsooDocumento36 páginasExamenes Final SsooAlex Gómez López100% (1)
- TestDocumento27 páginasTestAngel Luis Tovar PazAún no hay calificaciones
- Cuestionario U3 SODocumento14 páginasCuestionario U3 SOJoselyn Guerrero GarciaAún no hay calificaciones
- Ejercicios de Parciales ResueltosDocumento18 páginasEjercicios de Parciales ResueltosdndpaipaiAún no hay calificaciones
- Tarea 1 Ricardo MacielDocumento5 páginasTarea 1 Ricardo MacielRicardo MacielAún no hay calificaciones
- Ejercicio Memoria ResueltosDocumento4 páginasEjercicio Memoria ResueltosmayyyAún no hay calificaciones
- Sistemas Operativos Exposicion - Memoria VirtualDocumento16 páginasSistemas Operativos Exposicion - Memoria Virtualdiegoaguas22Aún no hay calificaciones
- Gestion de Memoria - S.ODocumento16 páginasGestion de Memoria - S.Oeduardo balzaAún no hay calificaciones
- Preguntas de Tipo TestDocumento5 páginasPreguntas de Tipo Testjuan godoyAún no hay calificaciones
- Soluciones Tema 2Documento3 páginasSoluciones Tema 2Sergio Muñoz100% (1)
- Sog 2013 09Documento5 páginasSog 2013 09Lyon T IonAún no hay calificaciones
- Examenes Con Soluciones SODocumento231 páginasExamenes Con Soluciones SOCyrusAún no hay calificaciones
- Ut03 Sistemas Operativos Gestic3b3n de Memoria Aso (Asir)Documento5 páginasUt03 Sistemas Operativos Gestic3b3n de Memoria Aso (Asir)RtyRteyAún no hay calificaciones
- Tema 17-1Documento30 páginasTema 17-1cheliAún no hay calificaciones
- ExamenDocumento4 páginasExamenMaria Ruiz LinoAún no hay calificaciones
- Sog 2014 02 N1Documento5 páginasSog 2014 02 N1Lyon T IonAún no hay calificaciones
- Sog 2013 02 N1Documento6 páginasSog 2013 02 N1Lyon T IonAún no hay calificaciones
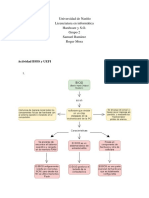
- BIOS y UEFIDocumento10 páginasBIOS y UEFIRoger MoraAún no hay calificaciones
- Como Funciona El Procesamiento en ParaleloDocumento4 páginasComo Funciona El Procesamiento en ParaleloFrancesco RuggieroAún no hay calificaciones
- Sistemas Operativos - Capitulo IIIDocumento11 páginasSistemas Operativos - Capitulo IIILuis Fernando JimenezAún no hay calificaciones
- Sog 2013 02 N2Documento4 páginasSog 2013 02 N2Lyon T IonAún no hay calificaciones
- Sog 2012 02 N2Documento6 páginasSog 2012 02 N2Lyon T IonAún no hay calificaciones
- MicroprocesadoresDocumento67 páginasMicroprocesadoresJaime Ballesta Julio100% (1)
- SO Tema4 Ejercicios PlanificacionDocumento4 páginasSO Tema4 Ejercicios PlanificacionAngel CroesAún no hay calificaciones
- Sog 2014 02 N2Documento5 páginasSog 2014 02 N2Lyon T IonAún no hay calificaciones
- Algoritmo BanqueroDocumento12 páginasAlgoritmo BanqueroMark Fortón OchoaAún no hay calificaciones
- Gestión de Procesos e Hilos en LinuxDocumento8 páginasGestión de Procesos e Hilos en LinuxLa Xiquittalinndaah Conseentiddahh0% (1)
- Historia Del MouseDocumento9 páginasHistoria Del MouseSYSNG INTERNETAún no hay calificaciones
- Sistemas operativos: conceptos, clasificación, estructura y funcionesDocumento65 páginasSistemas operativos: conceptos, clasificación, estructura y funcionesforcedtrackerAún no hay calificaciones
- Planificacion de Procesos Sistemas OperativosDocumento12 páginasPlanificacion de Procesos Sistemas OperativosArtuto LeyvaAún no hay calificaciones
- Funciones y capas del sistema operativoDocumento41 páginasFunciones y capas del sistema operativoAngel VazquezAún no hay calificaciones
- Técnicas Administración Del PlanificadorDocumento6 páginasTécnicas Administración Del PlanificadorJaqueline Cuahtepitzi CBAún no hay calificaciones
- Unidad #1 Introducción Al Lenguaje EnsambladorDocumento5 páginasUnidad #1 Introducción Al Lenguaje EnsambladoringgafabifiAún no hay calificaciones
- GESTIÓN MEMORIASDocumento13 páginasGESTIÓN MEMORIASMiguel BlancoAún no hay calificaciones
- Talleres Arquitectura, Cap1 Al 3Documento16 páginasTalleres Arquitectura, Cap1 Al 3Edwin David Gomez DelgadoAún no hay calificaciones
- Clusters vs. Grids, Sistemas Concurrentes y DistribuidosDocumento6 páginasClusters vs. Grids, Sistemas Concurrentes y DistribuidosFelipe Alejandro Jimenez CastilloAún no hay calificaciones
- Test 3Documento9 páginasTest 3Valeria Del CastilloAún no hay calificaciones
- Kernel y Partes Del KernelDocumento4 páginasKernel y Partes Del KernelAlam Garcia0% (1)
- Tipos de Fallas en Sistemas RPC, Sistemas Concurrentes y DistribuidosDocumento8 páginasTipos de Fallas en Sistemas RPC, Sistemas Concurrentes y DistribuidosFelipe Alejandro Jimenez CastilloAún no hay calificaciones
- Algoritmos Planificacion FCFS SJF SRTF Round RobinDocumento10 páginasAlgoritmos Planificacion FCFS SJF SRTF Round RobinRamon Lloret PertusaAún no hay calificaciones
- Niveles de RaidDocumento13 páginasNiveles de RaidCasecAún no hay calificaciones
- Resumen Gestion de MemoriaDocumento17 páginasResumen Gestion de MemoriaAnghelita CaldheronAún no hay calificaciones
- Preguntas Sobre El Levantamiento de SitioDocumento3 páginasPreguntas Sobre El Levantamiento de SitioxshadayxAún no hay calificaciones
- Sistema Operativo Windows 7Documento10 páginasSistema Operativo Windows 7Camilo Flórez EsquivelAún no hay calificaciones
- Algoritmo de Planificacion SPNDocumento12 páginasAlgoritmo de Planificacion SPNJohn Paul AmbuludiAún no hay calificaciones
- Administración de MemoriaDocumento39 páginasAdministración de MemoriaYonatan VázquezAún no hay calificaciones
- Niveles memoriaDocumento10 páginasNiveles memoriaHugo RodríguezAún no hay calificaciones
- Manejo de Espacio de Memoria Sec Und AriaDocumento18 páginasManejo de Espacio de Memoria Sec Und AriaJose Luis RodriguezAún no hay calificaciones
- Ejercicio 2Documento2 páginasEjercicio 2eliana_Aún no hay calificaciones
- SO RespuestasDocumento6 páginasSO RespuestasJuani PollaviniAún no hay calificaciones
- Cuestionario IntroduccionDocumento4 páginasCuestionario IntroduccionSanchez Tapia AbrahamAún no hay calificaciones
- Todos Los Test Sin CorreguirDocumento19 páginasTodos Los Test Sin CorreguirPol SanchzAún no hay calificaciones
- Preguntas de Tipo TestDocumento7 páginasPreguntas de Tipo Testjuan godoyAún no hay calificaciones
- Final LaboDocumento5 páginasFinal LaboJoseph ChamorroAún no hay calificaciones
- Pregunta de Autoevaluacion Taller de Sistemas OperativosDocumento15 páginasPregunta de Autoevaluacion Taller de Sistemas OperativosAlejandro Torres FarfánAún no hay calificaciones
- Funciones del SO y algoritmos de planificación de procesosDocumento8 páginasFunciones del SO y algoritmos de planificación de procesosLaura LeonAún no hay calificaciones
- UF0852 - Instalación y actualización de sistemas operativosDe EverandUF0852 - Instalación y actualización de sistemas operativosCalificación: 5 de 5 estrellas5/5 (1)
- Documento DigitalDocumento13 páginasDocumento DigitalJorge Arevalo SanchezAún no hay calificaciones
- Plaza002 Tecnico II - CAS 06 2022Documento2 páginasPlaza002 Tecnico II - CAS 06 2022FIDEL HUANCO RAMOSAún no hay calificaciones
- 33 138 1 SMDocumento11 páginas33 138 1 SMJuan Jose QuispeAún no hay calificaciones
- Introducción a Sistemas OperativosDocumento23 páginasIntroducción a Sistemas OperativosFIDEL HUANCO RAMOSAún no hay calificaciones
- RSL Sobre Diagnóstico de COVID-19 Utilizando Redes Neuronales Artificiales ConvolucionalesDocumento10 páginasRSL Sobre Diagnóstico de COVID-19 Utilizando Redes Neuronales Artificiales ConvolucionalesFIDEL HUANCO RAMOSAún no hay calificaciones
- Trabajo Monografia Junin - Ana HuancaDocumento30 páginasTrabajo Monografia Junin - Ana HuancaFIDEL HUANCO RAMOSAún no hay calificaciones
- Verificacion y Validacion de SWDocumento24 páginasVerificacion y Validacion de SWFIDEL HUANCO RAMOSAún no hay calificaciones
- Desarrollo Productivo Local Ana HuancaDocumento10 páginasDesarrollo Productivo Local Ana HuancaFIDEL HUANCO RAMOSAún no hay calificaciones
- Algoritmos en AADocumento5 páginasAlgoritmos en AAgeorgecardozoAún no hay calificaciones
- Ebang Ebit E11 + Rentabilidad - Valor de Minero de ASICDocumento2 páginasEbang Ebit E11 + Rentabilidad - Valor de Minero de ASICArq Jorge A Touma SaavedraAún no hay calificaciones
- Regresion ADocumento55 páginasRegresion AShirley Wendy Chauca SolgorreAún no hay calificaciones
- Ensayo CBRDocumento3 páginasEnsayo CBREli GutierrezAún no hay calificaciones
- Tema 23 Oposición PrimariaDocumento6 páginasTema 23 Oposición Primariaroziorh67% (3)
- Ejercicio 3.12 y 3.16 TreybalDocumento4 páginasEjercicio 3.12 y 3.16 Treybalfernando martinezAún no hay calificaciones
- C Alculo de Probabilidades IIDocumento32 páginasC Alculo de Probabilidades IIMarco Perez HernandezAún no hay calificaciones
- CalderaDocumento11 páginasCalderaCRsthiam SgAún no hay calificaciones
- Ejemplo RCMDocumento32 páginasEjemplo RCMMauricio Rodriguez100% (2)
- Horario 4F - I5foQiDocumento1 páginaHorario 4F - I5foQi•Stella Kun•Aún no hay calificaciones
- Matemáticas para Empresa - Funciones Reales de Una Variable - Tema 1Documento4 páginasMatemáticas para Empresa - Funciones Reales de Una Variable - Tema 1Maria Elena SalgadoAún no hay calificaciones
- GTC 124 (Segunda Actualización) Máquinas Eléctricas Rotatorias. Máquinas Eléctricas de C.A Usadas en Sistemas de Accionamiento de Potencia (Variadores de Velocidad) - Guía de AplicaciónDocumento98 páginasGTC 124 (Segunda Actualización) Máquinas Eléctricas Rotatorias. Máquinas Eléctricas de C.A Usadas en Sistemas de Accionamiento de Potencia (Variadores de Velocidad) - Guía de AplicaciónKlly CadavidAún no hay calificaciones
- Rimula R5 LE 10W-40 New API CK-4 Dynamic Protection PlusDocumento2 páginasRimula R5 LE 10W-40 New API CK-4 Dynamic Protection PlusVanessa Nicole Beecher GuillouxAún no hay calificaciones
- Separación de analgésicosDocumento4 páginasSeparación de analgésicosMischel Pamela Cardenas LopezAún no hay calificaciones
- Requerimientos de software: Identificación de participantes y puntos de vistaDocumento15 páginasRequerimientos de software: Identificación de participantes y puntos de vistaAndres Escobar MonterañoAún no hay calificaciones
- TAREA 1 - Yury Paez BermudezDocumento8 páginasTAREA 1 - Yury Paez Bermudezpaecitas08Aún no hay calificaciones
- Grice y el principio de cooperaciónDocumento8 páginasGrice y el principio de cooperaciónAlfaro Juan JoséAún no hay calificaciones
- Proyecto de Sistema Web para Seguimiento de EgresadosDocumento64 páginasProyecto de Sistema Web para Seguimiento de EgresadosGino Chavez PajueloAún no hay calificaciones
- Actividad 5 Calculo Grado 11 PDFDocumento3 páginasActividad 5 Calculo Grado 11 PDFsaydaAún no hay calificaciones
- Historia experimentos cambiaron mundoDocumento3 páginasHistoria experimentos cambiaron mundoJazmin FernandezAún no hay calificaciones
- Quality Core ToolsDocumento2 páginasQuality Core ToolsLuis VargasAún no hay calificaciones
- Conversión de Coordenadas Geográficas A UTM Usando Los Elipsoides Hayford, WGS 84 o SAD 69Documento5 páginasConversión de Coordenadas Geográficas A UTM Usando Los Elipsoides Hayford, WGS 84 o SAD 69Mario MoranAún no hay calificaciones
- Física Exp III ENERO 2014 PDFDocumento86 páginasFísica Exp III ENERO 2014 PDFAaron Granero PimientaAún no hay calificaciones
- PolimerizacionDocumento8 páginasPolimerizaciongeraldine romaniAún no hay calificaciones
- GomiDocumento13 páginasGomiEnrique AgAún no hay calificaciones
- Esfuerzos ResidualesDocumento18 páginasEsfuerzos ResidualesVOLNEY HUMBERTOAún no hay calificaciones
- Cuerpos Geométrios - VistasDocumento12 páginasCuerpos Geométrios - VistasSOFIA INES AREVALO CARBONIAún no hay calificaciones
- TAREA 2 Quimica InorganicaDocumento6 páginasTAREA 2 Quimica InorganicaYuli GuzmánAún no hay calificaciones
- Intersección de Recta Con Poliedros y Superficies - Urp-2022-IIDocumento23 páginasIntersección de Recta Con Poliedros y Superficies - Urp-2022-IIJairo SanchoAún no hay calificaciones
- Reactores químicos: clasificación y tiposDocumento11 páginasReactores químicos: clasificación y tiposIlse SalazarAún no hay calificaciones
- CentrifugacionDocumento11 páginasCentrifugacionoliverAún no hay calificaciones