También podría gustarte
- Cuestionario U3 SODocumento14 páginasCuestionario U3 SOJoselyn Guerrero GarciaAún no hay calificaciones
- Tarea 1 Ricardo MacielDocumento5 páginasTarea 1 Ricardo MacielRicardo MacielAún no hay calificaciones
- Ejercicio Memoria ResueltosDocumento4 páginasEjercicio Memoria ResueltosmayyyAún no hay calificaciones
- Test Soluciones 20190411 FSO ParcialDocumento4 páginasTest Soluciones 20190411 FSO ParcialFIDEL HUANCO RAMOSAún no hay calificaciones
- Sistemas Operativos Exposicion - Memoria VirtualDocumento16 páginasSistemas Operativos Exposicion - Memoria Virtualdiegoaguas22Aún no hay calificaciones
- Gestion de Memoria - S.ODocumento16 páginasGestion de Memoria - S.Oeduardo balzaAún no hay calificaciones
- Preguntas de Tipo TestDocumento5 páginasPreguntas de Tipo Testjuan godoyAún no hay calificaciones
- Soluciones Tema 2Documento3 páginasSoluciones Tema 2Sergio Muñoz100% (1)
- Examen SO1 2017 Feb Mar Solucion PDFDocumento6 páginasExamen SO1 2017 Feb Mar Solucion PDFFlavioAún no hay calificaciones
- FSO 20190520 Ordinaria p2 Test SolucionesDocumento4 páginasFSO 20190520 Ordinaria p2 Test SolucionesHector BazarteAún no hay calificaciones
- Examenes Con Soluciones SODocumento231 páginasExamenes Con Soluciones SOCyrusAún no hay calificaciones
- Sog 2013 09Documento5 páginasSog 2013 09Lyon T IonAún no hay calificaciones
- Fundamentos de Los Sistemas Operativos Examen Parcial, 9 de Abril de 2018 Preguntas Del TestDocumento4 páginasFundamentos de Los Sistemas Operativos Examen Parcial, 9 de Abril de 2018 Preguntas Del TestBrenda Nahomi Quispe GonzalesAún no hay calificaciones
- Tema 17-1Documento30 páginasTema 17-1cheliAún no hay calificaciones
- Sistemas Operativos - Capitulo IIIDocumento11 páginasSistemas Operativos - Capitulo IIILuis Fernando JimenezAún no hay calificaciones
- Ut03 Sistemas Operativos Gestic3b3n de Memoria Aso (Asir)Documento5 páginasUt03 Sistemas Operativos Gestic3b3n de Memoria Aso (Asir)RtyRteyAún no hay calificaciones
- Examenes Final SsooDocumento36 páginasExamenes Final SsooAlex Gómez López100% (1)
- Gestión de Procesos e Hilos en LinuxDocumento8 páginasGestión de Procesos e Hilos en LinuxLa Xiquittalinndaah Conseentiddahh0% (1)
- Técnicas Administración Del PlanificadorDocumento6 páginasTécnicas Administración Del PlanificadorJaqueline Cuahtepitzi CBAún no hay calificaciones
- Como Funciona El Procesamiento en ParaleloDocumento4 páginasComo Funciona El Procesamiento en ParaleloFrancesco RuggieroAún no hay calificaciones
- Sog 2014 02 N1Documento5 páginasSog 2014 02 N1Lyon T IonAún no hay calificaciones
- Sog 2013 02 N1Documento6 páginasSog 2013 02 N1Lyon T IonAún no hay calificaciones
- Sistemas operativos: conceptos, clasificación, estructura y funcionesDocumento65 páginasSistemas operativos: conceptos, clasificación, estructura y funcionesforcedtrackerAún no hay calificaciones
- Sog 2013 02 N2Documento4 páginasSog 2013 02 N2Lyon T IonAún no hay calificaciones
- Niveles de RaidDocumento13 páginasNiveles de RaidCasecAún no hay calificaciones
- Sog 2012 02 N2Documento6 páginasSog 2012 02 N2Lyon T IonAún no hay calificaciones
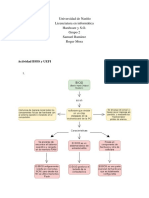
- BIOS y UEFIDocumento10 páginasBIOS y UEFIRoger MoraAún no hay calificaciones
- Algoritmo BanqueroDocumento12 páginasAlgoritmo BanqueroMark Fortón OchoaAún no hay calificaciones
- TestDocumento27 páginasTestAngel Luis Tovar PazAún no hay calificaciones
- Planificacion de Procesos Sistemas OperativosDocumento12 páginasPlanificacion de Procesos Sistemas OperativosArtuto LeyvaAún no hay calificaciones
- Historia Del MouseDocumento9 páginasHistoria Del MouseSYSNG INTERNETAún no hay calificaciones
- Unidad #1 Introducción Al Lenguaje EnsambladorDocumento5 páginasUnidad #1 Introducción Al Lenguaje EnsambladoringgafabifiAún no hay calificaciones
- ExamenDocumento4 páginasExamenMaria Ruiz LinoAún no hay calificaciones
- GESTIÓN MEMORIASDocumento13 páginasGESTIÓN MEMORIASMiguel BlancoAún no hay calificaciones
- Kernel y Partes Del KernelDocumento4 páginasKernel y Partes Del KernelAlam Garcia0% (1)
- MicroprocesadoresDocumento67 páginasMicroprocesadoresJaime Ballesta Julio100% (1)
- SO Tema4 Ejercicios PlanificacionDocumento4 páginasSO Tema4 Ejercicios PlanificacionAngel CroesAún no hay calificaciones
- Talleres Arquitectura, Cap1 Al 3Documento16 páginasTalleres Arquitectura, Cap1 Al 3Edwin David Gomez DelgadoAún no hay calificaciones
- Sog 2014 02 N2Documento5 páginasSog 2014 02 N2Lyon T IonAún no hay calificaciones
- Test 3Documento9 páginasTest 3Valeria Del CastilloAún no hay calificaciones
- Memoria Virtual y PaginacionDocumento39 páginasMemoria Virtual y PaginacionJohnny Acero GuamanAún no hay calificaciones
- Resumen Gestion de MemoriaDocumento17 páginasResumen Gestion de MemoriaAnghelita CaldheronAún no hay calificaciones
- Funciones y capas del sistema operativoDocumento41 páginasFunciones y capas del sistema operativoAngel VazquezAún no hay calificaciones
- Manejo de Espacio de Memoria Sec Und AriaDocumento18 páginasManejo de Espacio de Memoria Sec Und AriaJose Luis RodriguezAún no hay calificaciones
- TP 6-2020Documento5 páginasTP 6-2020juan godoyAún no hay calificaciones
- Algoritmos Planificacion FCFS SJF SRTF Round RobinDocumento10 páginasAlgoritmos Planificacion FCFS SJF SRTF Round RobinRamon Lloret PertusaAún no hay calificaciones
- Comparativa Manejo de Memoria Windows Vs LinuxDocumento1 páginaComparativa Manejo de Memoria Windows Vs LinuxAlaris100% (1)
- Preguntas Sobre El Levantamiento de SitioDocumento3 páginasPreguntas Sobre El Levantamiento de SitioxshadayxAún no hay calificaciones
- Sistema de Archivos Fat16 y Fat32Documento9 páginasSistema de Archivos Fat16 y Fat32Joao CorralesAún no hay calificaciones
- Memoria virtual, caché y espectro de almacenamiento en sistemas operativosDocumento21 páginasMemoria virtual, caché y espectro de almacenamiento en sistemas operativosPablo Cesar Medina BarretoAún no hay calificaciones
- SO RespuestasDocumento6 páginasSO RespuestasJuani PollaviniAún no hay calificaciones
- Lenguaje Interpretado y Lenguaje CompiladoDocumento4 páginasLenguaje Interpretado y Lenguaje CompiladoDaniel RodriguezAún no hay calificaciones
- Ley de Senos y CosenosDocumento7 páginasLey de Senos y CosenosJauregayAún no hay calificaciones
- Tipos de Usuarios SGBDDocumento9 páginasTipos de Usuarios SGBDRicardo AyalaAún no hay calificaciones
- Gonzalo Gatius - Parcial 16 Nov 2021Documento5 páginasGonzalo Gatius - Parcial 16 Nov 2021gonza752Aún no hay calificaciones
- Tarea SODocumento33 páginasTarea SOOlgaa BautistaAún no hay calificaciones
- Preguntas para Final de Arquitectura de ComputadoresDocumento3 páginasPreguntas para Final de Arquitectura de ComputadoresAndro Erick Valero MedinaAún no hay calificaciones
- Guía orientadora Administración de memoriaDocumento9 páginasGuía orientadora Administración de memoriasandraAún no hay calificaciones
- SegmentaciónDocumento6 páginasSegmentaciónKeniaAlejandraSalazarAún no hay calificaciones
- Técnicas Avanzadas de Predicción de SaltoDocumento4 páginasTécnicas Avanzadas de Predicción de SaltoWendyAún no hay calificaciones
- Oracle bd2Documento6 páginasOracle bd2Bessy CastilloAún no hay calificaciones
- Proyecto de Grado - Tecnico InformaticoDocumento27 páginasProyecto de Grado - Tecnico InformaticoGregorio Rafael Peralta SantanaAún no hay calificaciones
- Caso 1 - Cableado Estructurado-1Documento31 páginasCaso 1 - Cableado Estructurado-1ALEXAún no hay calificaciones
- Auditoria Semana 2Documento4 páginasAuditoria Semana 2Anthony MendozaAún no hay calificaciones
- 11.10.1 Packet Tracer - Design and Implement A VLSM Addressing Scheme 3Documento3 páginas11.10.1 Packet Tracer - Design and Implement A VLSM Addressing Scheme 3Leo CurielAún no hay calificaciones
- Botón de Pánico Manual de UsuarioDocumento9 páginasBotón de Pánico Manual de UsuarioCristianVasquezAún no hay calificaciones
- Configuracion TelegrafDocumento2 páginasConfiguracion TelegrafFRANCISCO JAVIER Sampedro nuñezAún no hay calificaciones
- Calidad Del Software IFB 0407Documento8 páginasCalidad Del Software IFB 0407Eg Lz100% (1)
- Interfaz Grafica en Python EasyDocumento3 páginasInterfaz Grafica en Python EasyTayGamers RodirguezAún no hay calificaciones
- Guia Convocatoria Elementos 2021 A PDFDocumento22 páginasGuia Convocatoria Elementos 2021 A PDFKEVIN SEBASTIAN POVEDA GONZALEZAún no hay calificaciones
- UANL HorarioDocumento2 páginasUANL HorariocatalinaAún no hay calificaciones
- Graficacion y MultimediaDocumento2 páginasGraficacion y MultimediaJovanny AzpeitiaAún no hay calificaciones
- John Deere Service Advisor 5.3 AG+CF ESPAÑOLDocumento3 páginasJohn Deere Service Advisor 5.3 AG+CF ESPAÑOLIván Cascudo100% (2)
- Trabajo de Investigación Teoría de ConjuntosDocumento2 páginasTrabajo de Investigación Teoría de ConjuntosGian Villa CuadrosAún no hay calificaciones
- KESB Product Datasheet Select SP FinalDocumento2 páginasKESB Product Datasheet Select SP FinalElmer OliverosAún no hay calificaciones
- Sesion 06 - Modelo de Requerimientos - TeoriasDocumento8 páginasSesion 06 - Modelo de Requerimientos - TeoriasABEL SALOMON HUICHE ZU�IGAAún no hay calificaciones
- SINU-151 Unidad02 Material ReforzamientoDocumento3 páginasSINU-151 Unidad02 Material ReforzamientoKatherine GadeaaaAún no hay calificaciones
- State of Software Security Volume 10 Veracode Report 26 45Documento20 páginasState of Software Security Volume 10 Veracode Report 26 45Ignacio Romero OrtizAún no hay calificaciones
- ESwitching Lab 3 5 1Documento7 páginasESwitching Lab 3 5 1YUNG GENGARAún no hay calificaciones
- Robotica CapI MDocumento24 páginasRobotica CapI Melizardo macias condoriAún no hay calificaciones
- Comandos Huawei Node BDocumento2 páginasComandos Huawei Node BKevin mellisho tarazonaAún no hay calificaciones
- Privilegios de Acceso BDDocumento4 páginasPrivilegios de Acceso BDArmando Cruz JaimesAún no hay calificaciones
- Simuladores de circuitos electrónicos gratuitos y su utilidadDocumento2 páginasSimuladores de circuitos electrónicos gratuitos y su utilidadReina Andrea Hualpa NachoAún no hay calificaciones
- SILABO - 2022-1MT417 Procesamiento Digital de SenalesDocumento4 páginasSILABO - 2022-1MT417 Procesamiento Digital de SenalesDIEGO ALEJANDRO CASTILLO RAYMEAún no hay calificaciones
- 1.2.2.procedimiento Inspecciones GerencialesDocumento2 páginas1.2.2.procedimiento Inspecciones GerencialesGinna OsorioAún no hay calificaciones
- Multiplexor y Generador de ParidadDocumento3 páginasMultiplexor y Generador de ParidadCarlos Andres LopezAún no hay calificaciones
- Que Es Un Procedimiento o Una Funcion en PseintDocumento4 páginasQue Es Un Procedimiento o Una Funcion en PseintJEAN PIERRE STEVEN HERNAN FLORES CHIPANAAún no hay calificaciones
- LRTimelapse Pro v6 edición timelapseDocumento1 páginaLRTimelapse Pro v6 edición timelapseRobertCastilloAún no hay calificaciones
- Clase 7Documento26 páginasClase 7DKSAJNDKASJAún no hay calificaciones
- Tratamiento de Cadenas de CaracteresDocumento29 páginasTratamiento de Cadenas de CaracteresSaid PaezAún no hay calificaciones
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Resumen de El cuadro de mando integral paso a paso de Paul R. NivenDe EverandResumen de El cuadro de mando integral paso a paso de Paul R. NivenCalificación: 5 de 5 estrellas5/5 (2)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Metodología básica de instrumentación industrial y electrónicaDe EverandMetodología básica de instrumentación industrial y electrónicaCalificación: 4 de 5 estrellas4/5 (12)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- UF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)De EverandUF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)Calificación: 2 de 5 estrellas2/5 (1)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- El dilema humano: Del Homo sapiens al Homo techDe EverandEl dilema humano: Del Homo sapiens al Homo techCalificación: 4 de 5 estrellas4/5 (1)
- Introducción a la Estadística BayesianaDe EverandIntroducción a la Estadística BayesianaCalificación: 5 de 5 estrellas5/5 (2)
- La revolución de Netflix en el cine y la televisión: Pantallas, series y streamingDe EverandLa revolución de Netflix en el cine y la televisión: Pantallas, series y streamingCalificación: 5 de 5 estrellas5/5 (2)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Minería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásDe EverandMinería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Arduino. Guía práctica de fundamentos y simulación: RobóticaDe EverandArduino. Guía práctica de fundamentos y simulación: RobóticaCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones