También podría gustarte
- Unidad IvDocumento20 páginasUnidad IvOzkar CobAún no hay calificaciones
- Unidad IV PDFDocumento11 páginasUnidad IV PDFLuis ReusAún no hay calificaciones
- Algebra Unidad 4Documento14 páginasAlgebra Unidad 4Jose Raul Morales AguilarAún no hay calificaciones
- Tareas RufinoDocumento33 páginasTareas Rufinoeduardo QuirogaAún no hay calificaciones
- Adame Rivera Ivan Jesus Inv 4Documento21 páginasAdame Rivera Ivan Jesus Inv 4ivan jesusAún no hay calificaciones
- Algebra 4 UnidadDocumento10 páginasAlgebra 4 Unidadjuan carlos perez castroAún no hay calificaciones
- Algebra LinealDocumento40 páginasAlgebra LinealErick Alvarado CupilAún no hay calificaciones
- Unidad 4 Algebra LinealDocumento14 páginasUnidad 4 Algebra Linealjgortizfdez100% (2)
- Problemas Resueltos de Teorc3ada de ColasDocumento15 páginasProblemas Resueltos de Teorc3ada de ColasTeresa AguilarAún no hay calificaciones
- Espacios VectorialesDocumento30 páginasEspacios VectorialesFranciisco R. Coliin SiilvaAún no hay calificaciones
- Definición de Espacio VectorialDocumento10 páginasDefinición de Espacio VectorialRodrigo Estudillo LopezAún no hay calificaciones
- Algebra LinealDocumento11 páginasAlgebra LinealAPCAún no hay calificaciones
- InvestigacionDocumento4 páginasInvestigacionSara InfanteAún no hay calificaciones
- Algebra LinealDocumento8 páginasAlgebra Linealoctavio montes laraAún no hay calificaciones
- Unidad 4 Algebra LinealDocumento13 páginasUnidad 4 Algebra LinealAlan SerranoAún no hay calificaciones
- Unidad 4 Maria Guadalupe Rodriguez VazquezDocumento16 páginasUnidad 4 Maria Guadalupe Rodriguez VazquezBelén CortésAún no hay calificaciones
- ManualDocumento35 páginasManualkaren itzel moreno espinozaAún no hay calificaciones
- 4.1 Definición de Espacio VectorialDocumento21 páginas4.1 Definición de Espacio VectorialAlonso CastañaresAún no hay calificaciones
- Tema 4 Espacios VectorialesDocumento17 páginasTema 4 Espacios VectorialesBraulio Cabrera CosmeAún no hay calificaciones
- Resumen Unidad 4 AlgebraDocumento10 páginasResumen Unidad 4 AlgebraMisael NavaAún no hay calificaciones
- Espacios VectorialesDocumento17 páginasEspacios VectorialesEsau osorioAún no hay calificaciones
- Portafolio de Evidencia Unidad 4Documento12 páginasPortafolio de Evidencia Unidad 4Alejandro BosquezAún no hay calificaciones
- Espacios VectorialesDocumento11 páginasEspacios VectorialesJulissa JuarezAún no hay calificaciones
- Espacio VectorialDocumento17 páginasEspacio VectorialarielAún no hay calificaciones
- Algebra LinealDocumento3 páginasAlgebra LinealTeresa AguilarAún no hay calificaciones
- Combinación LinealDocumento3 páginasCombinación LinealnemebuAún no hay calificaciones
- Espacios vectoriales y sus propiedadesDocumento11 páginasEspacios vectoriales y sus propiedadesIndi ÁngelAún no hay calificaciones
- Definición de Espacio VectorialDocumento2 páginasDefinición de Espacio VectorialJuanpiz PereyraAún no hay calificaciones
- AlgebraDocumento27 páginasAlgebraMiguelAngelo music-y-gameplayAún no hay calificaciones
- Algebra, Illich Ramses Amado MendozaDocumento6 páginasAlgebra, Illich Ramses Amado MendozaIllich AmadoAún no hay calificaciones
- Unidad 4Documento28 páginasUnidad 4Ximena RendonAún no hay calificaciones
- DefiniciónSubespacioVectorialYSusPropiedadesDocumento2 páginasDefiniciónSubespacioVectorialYSusPropiedadesJD EddieAún no hay calificaciones
- Unidad IIDocumento16 páginasUnidad IIJEFFERSON KEVIN TONGUINO POZOAún no hay calificaciones
- 4-1-1 Espacio Vectorial 1Documento6 páginas4-1-1 Espacio Vectorial 1Magdalena MariscalAún no hay calificaciones
- Trabajo FinalDocumento11 páginasTrabajo Finall20330874Aún no hay calificaciones
- ClasesalgebraDocumento8 páginasClasesalgebraErika Lozada RusselAún no hay calificaciones
- Espacio VectorialDocumento13 páginasEspacio VectorialCelestino VargasAún no hay calificaciones
- ACTIVIDAD 5 AlgeDocumento11 páginasACTIVIDAD 5 AlgeArisleydiCruzAún no hay calificaciones
- Unidad 4-Espacios VectorialesDocumento24 páginasUnidad 4-Espacios VectorialesCRUZ100% (2)
- Actividad 1 Unidad 4 AlDocumento17 páginasActividad 1 Unidad 4 AlGabriela TaishoAún no hay calificaciones
- 4 Unidad Algebra LineaDocumento12 páginas4 Unidad Algebra Linearicardo garciaAún no hay calificaciones
- Espv Nava Negrete Oswaldo Daryel 11CCDocumento14 páginasEspv Nava Negrete Oswaldo Daryel 11CCOswaldo Daryel Nava NegreteAún no hay calificaciones
- 05 Tema 04 09 10Documento13 páginas05 Tema 04 09 10Juan FloresAún no hay calificaciones
- Espacios VectorialesDocumento11 páginasEspacios VectorialesSaulo Leonel Romo AAún no hay calificaciones
- Apuntes Unidad 3Documento9 páginasApuntes Unidad 3un lectorAún no hay calificaciones
- Algebra Lineal Espacios VectorialesDocumento18 páginasAlgebra Lineal Espacios VectorialesRstepAún no hay calificaciones
- Algebra LinealDocumento43 páginasAlgebra LinealJMjm07Aún no hay calificaciones
- Algebra Lineal Unidad 4 y 5Documento24 páginasAlgebra Lineal Unidad 4 y 5Jose Ernesto Castro Chavez100% (1)
- Vectores AlgebraDocumento15 páginasVectores AlgebraJunior Hinojosa SuaresAún no hay calificaciones
- Trabajo Final AlgebraDocumento8 páginasTrabajo Final AlgebraChuy Arellano FuentesAún no hay calificaciones
- Algebra lineal: Espacios vectorialesDocumento22 páginasAlgebra lineal: Espacios vectorialesIlse Mariel Rodríguez SandovalAún no hay calificaciones
- Clase 10 AL (ICI)Documento7 páginasClase 10 AL (ICI)ignacio andres guerrero gómezAún no hay calificaciones
- Álgebra Lineal en la PazDocumento23 páginasÁlgebra Lineal en la PazAndrea Haro GonzalezAún no hay calificaciones
- Espacios Vectoriales y Sus PropiedadesDocumento7 páginasEspacios Vectoriales y Sus PropiedadesEduardo GutierrezAún no hay calificaciones
- Resumen Unidad 4Documento6 páginasResumen Unidad 4FedrickAún no hay calificaciones
- AED-Tema 4-Espacios VectorialesDocumento21 páginasAED-Tema 4-Espacios VectorialesAndrés Fdo RomeroAún no hay calificaciones
- U4 - Espacios VectorialesDocumento12 páginasU4 - Espacios VectorialespedosAún no hay calificaciones
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- Ejercicios de Oferta y DemandaDocumento11 páginasEjercicios de Oferta y DemandaHeyma Oyarce Acosta100% (1)
- Guia A Colores Turistica de AmsterdamDocumento64 páginasGuia A Colores Turistica de AmsterdamhectorAún no hay calificaciones
- Carta de Presentacion BimboDocumento13 páginasCarta de Presentacion BimboferAún no hay calificaciones
- 1PDocumento10 páginas1PJohanLiebertAún no hay calificaciones
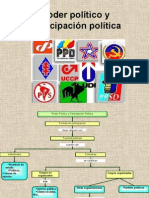
- Poder Político y Participación PolíticaDocumento6 páginasPoder Político y Participación PolíticaKarla Campaña Vilo100% (3)
- Taller N0 1 de Aprendizaje Historia Del Derecho-Unidad 4 Valor 10%Documento4 páginasTaller N0 1 de Aprendizaje Historia Del Derecho-Unidad 4 Valor 10%Jeferson BayonaAún no hay calificaciones
- Curso Tecnico QuiromasajeDocumento14 páginasCurso Tecnico QuiromasajeSusan Mosquera TravelinaAún no hay calificaciones
- Mi Cocina Escoffier 1 Tomo Pluton Ediciones - CompressDocumento4 páginasMi Cocina Escoffier 1 Tomo Pluton Ediciones - CompressFamilia Peñuela RodriguezAún no hay calificaciones
- Surtidor EcomulDocumento14 páginasSurtidor EcomulJoshu QuintanillaAún no hay calificaciones
- Ayuno y SaciedadDocumento96 páginasAyuno y SaciedadNati Boyko0% (1)
- La LopnaDocumento7 páginasLa LopnaOzwaldo Rioz V'zAún no hay calificaciones
- MA262 - Libro Digital - Derivada de Funciones TrigonométricasDocumento9 páginasMA262 - Libro Digital - Derivada de Funciones TrigonométricasFred Jheffersson100% (1)
- Metabolismo GlucidosDocumento25 páginasMetabolismo GlucidosJulian PérezAún no hay calificaciones
- Libro - Ingenieria de La Confiabilidad Arata Arata Cap.1Documento78 páginasLibro - Ingenieria de La Confiabilidad Arata Arata Cap.1Alexander Ramos Peña67% (3)
- Bebidas graduación alcohólicaDocumento2 páginasBebidas graduación alcohólicaJorge MartínezAún no hay calificaciones
- El Kamasutra Gallego-CSP Proof-08!11!13Documento38 páginasEl Kamasutra Gallego-CSP Proof-08!11!13Alfonso Cordal RodriguezAún no hay calificaciones
- Mensajero descripción cargoDocumento3 páginasMensajero descripción cargoedgarysgarcia19Aún no hay calificaciones
- Maquinas CosechadorasDocumento3 páginasMaquinas CosechadorasRonald Ramon Tubay PalmaAún no hay calificaciones
- Ess118 Artritis 20200630 Despuesauditoria Ess118 Artritis 20200630 DespuesauditoriaDocumento2389 páginasEss118 Artritis 20200630 Despuesauditoria Ess118 Artritis 20200630 DespuesauditoriaRUBEN DARIO NARVAEZ ROMOAún no hay calificaciones
- Ensayo SocioculturalDocumento4 páginasEnsayo SocioculturalJair Martinez100% (2)
- Análisis Cinemático de Una Transmisión Automática Allison 1000Documento9 páginasAnálisis Cinemático de Una Transmisión Automática Allison 1000Ricardo Fierro100% (1)
- DefiniciónDocumento2 páginasDefiniciónHugo ValenciaAún no hay calificaciones
- La Formación Del Pensamiento Pedagogico ModernoDocumento3 páginasLa Formación Del Pensamiento Pedagogico ModernoAnnabella CruzAún no hay calificaciones
- Jorge Ricardo Flores MoyanoDocumento174 páginasJorge Ricardo Flores MoyanoAleAún no hay calificaciones
- Caddy 2017 (Abs)Documento7 páginasCaddy 2017 (Abs)Rbrt CruzAún no hay calificaciones
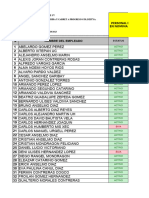
- Revision de Personal en Nomina - Light Towers Nov. 23Documento26 páginasRevision de Personal en Nomina - Light Towers Nov. 23Ulises RodríguezAún no hay calificaciones
- Control prenatal: guía completaDocumento21 páginasControl prenatal: guía completaDanna L. S. Barrios100% (2)
- Recién nacido prematuro con EMH: Cuidados de enfermería especializadaDocumento209 páginasRecién nacido prematuro con EMH: Cuidados de enfermería especializadaMADELEIN TRINIDAD MERA CHANCAYAún no hay calificaciones
- FMOF-103 Formato de Inspeccion de Equipo de Gruas, Eslingas, Carros Elevadores y Patines de CargaDocumento1 páginaFMOF-103 Formato de Inspeccion de Equipo de Gruas, Eslingas, Carros Elevadores y Patines de CargaP-ChanMXAún no hay calificaciones