También podría gustarte
- Modulos de ScipyDocumento15 páginasModulos de ScipyWalter OrdoñezAún no hay calificaciones
- Ipython E.DDocumento41 páginasIpython E.DCristian Brian ALMARAZ ROCHAAún no hay calificaciones
- Informe Control 2.1Documento11 páginasInforme Control 2.1Chino MendozaAún no hay calificaciones
- Guia03.ipynb - ColaboratoryDocumento4 páginasGuia03.ipynb - Colaboratory014100146bAún no hay calificaciones
- Laboratorio NumpyDocumento9 páginasLaboratorio NumpyRemigio Rodríguez A.Aún no hay calificaciones
- Practica PythonDocumento7 páginasPractica PythoncamiAún no hay calificaciones
- Copia de Tema01.ipynb - ColaboratoryDocumento6 páginasCopia de Tema01.ipynb - ColaboratoryCáceres Rubio KevinAún no hay calificaciones
- Python - Funciones RecursivasDocumento13 páginasPython - Funciones RecursivasErvin Fabiel Urbina SánchezAún no hay calificaciones
- Notas Curso de Estadistica ComputacionalDocumento17 páginasNotas Curso de Estadistica ComputacionalPablo Perez MoyaAún no hay calificaciones
- TEO S3 AyDAlgoritmos 2024Documento64 páginasTEO S3 AyDAlgoritmos 2024JOSE LUIS PARRALES TORRESAún no hay calificaciones
- Guia 3 AD, JR, MS, LCDocumento13 páginasGuia 3 AD, JR, MS, LCAdriana De León CortezAún no hay calificaciones
- Calculo de PiDocumento14 páginasCalculo de PiFelipe BuenoAún no hay calificaciones
- 2-Primeros Pasos en PythonDocumento10 páginas2-Primeros Pasos en PythonDavid PradaAún no hay calificaciones
- Interpolacion LagrangeDocumento9 páginasInterpolacion LagrangeJean Carlos Salcedo TorresAún no hay calificaciones
- Auto-Corrpython - Jupyter NotebookDocumento4 páginasAuto-Corrpython - Jupyter NotebookandreinaAún no hay calificaciones
- Ejercicios ResueltosDocumento31 páginasEjercicios ResueltosMarcos Ramos0% (1)
- Lab. Met. Numericos - Lab 6.1 (Interpolación y Regresión) PDFDocumento5 páginasLab. Met. Numericos - Lab 6.1 (Interpolación y Regresión) PDFLa'Nana Joha FalconettAún no hay calificaciones
- Codigo de Los EjerciciosDocumento15 páginasCodigo de Los EjerciciosnoryaguiAún no hay calificaciones
- C Cheat SheetDocumento13 páginasC Cheat Sheetspleen-5230Aún no hay calificaciones
- Color Magnitude - Diagram PresentationDocumento36 páginasColor Magnitude - Diagram PresentationDavid MesaAún no hay calificaciones
- Proyecto Final. IDCDocumento30 páginasProyecto Final. IDCCarlos Antonio FloresAún no hay calificaciones
- Informe - Tema 01Documento36 páginasInforme - Tema 01Raul Depaz NuñezAún no hay calificaciones
- Ejercicios Propuestos PhytonDocumento4 páginasEjercicios Propuestos PhytonLuisHHerreraAún no hay calificaciones
- Cap 2Documento12 páginasCap 2Johan NikoAún no hay calificaciones
- infoPLC SimbologiaDocumento10 páginasinfoPLC SimbologiaVictorAvilaAún no hay calificaciones
- 1.2. Manual - Machine - Learning - PythonDocumento65 páginas1.2. Manual - Machine - Learning - PythonConchi MarcosAún no hay calificaciones
- Red Neuronal en PhytonDocumento3 páginasRed Neuronal en PhytonFrancisco EspinozaAún no hay calificaciones
- Certamen 1 ELO-321 Parte 1: Profesor: Mauricio Araya 13 de Octubre Del 2022Documento2 páginasCertamen 1 ELO-321 Parte 1: Profesor: Mauricio Araya 13 de Octubre Del 2022Jorge Magaña NúñezAún no hay calificaciones
- Informe N°1-Intro A Telec.Documento35 páginasInforme N°1-Intro A Telec.Ronny Joel ChAún no hay calificaciones
- Lab 1. Introducción A ScilabDocumento6 páginasLab 1. Introducción A ScilabMaria SAún no hay calificaciones
- Graficos PhytonDocumento40 páginasGraficos PhytonHernán CornejoAún no hay calificaciones
- Manual de Python, Mathlab y LatexDocumento28 páginasManual de Python, Mathlab y LatexDaniel Valencia CorderoAún no hay calificaciones
- Lab 0 Módulos y LibreríasDocumento12 páginasLab 0 Módulos y LibreríasPaula NastarAún no hay calificaciones
- Calculando Matrices Inversas en PythonDocumento15 páginasCalculando Matrices Inversas en Pythonacopatcio22Aún no hay calificaciones
- ScapyDocumento52 páginasScapykronoxAún no hay calificaciones
- Trabajo Final de SemestreDocumento14 páginasTrabajo Final de Semestrefelipe merchanAún no hay calificaciones
- Parcial 1 Equipo 13Documento5 páginasParcial 1 Equipo 13Jorge Andrés Leiva MorantesAún no hay calificaciones
- EstructuraDocumento8 páginasEstructuraWiponsiAún no hay calificaciones
- Resumen Parcial 02Documento9 páginasResumen Parcial 02Milagros BustosAún no hay calificaciones
- Cómo Crear Matrices en Python Con NumPy - PybonacciDocumento5 páginasCómo Crear Matrices en Python Con NumPy - PybonacciJorge Aqué100% (1)
- Laboratorio 4. Introducción A ScilabDocumento9 páginasLaboratorio 4. Introducción A ScilabRichard Antoio CastilloAún no hay calificaciones
- Guia Educativa Python - Python For Loop (With Easy Examples)Documento7 páginasGuia Educativa Python - Python For Loop (With Easy Examples)Yolo TrolsitoAún no hay calificaciones
- LibreOffice Con Python para Cálculos NuméricosDocumento19 páginasLibreOffice Con Python para Cálculos NuméricosCamilo Bernal100% (2)
- Metodos ProyectoDocumento6 páginasMetodos ProyectoDylan ToapantaAún no hay calificaciones
- Práctica No.7 PolinomiosDocumento2 páginasPráctica No.7 PolinomiosJose MontaluisaAún no hay calificaciones
- Programación I Capítulo 3 RecursividadDocumento25 páginasProgramación I Capítulo 3 RecursividadrobalinoloonieAún no hay calificaciones
- (Solucionario) Clase 1 - Curso Introductorio de Python - Ipynb - ColaboratoryDocumento21 páginas(Solucionario) Clase 1 - Curso Introductorio de Python - Ipynb - ColaboratoryJimmi BaezAún no hay calificaciones
- Python para Informáticos PDFDocumento47 páginasPython para Informáticos PDFlfervalenciaAún no hay calificaciones
- Examenes PasadosDocumento30 páginasExamenes PasadosSanti A SecasAún no hay calificaciones
- Complejos en Matlab PDFDocumento7 páginasComplejos en Matlab PDFIracema GonzalezAún no hay calificaciones
- PythonDocumento29 páginasPythonOscar Patricio CaceresAún no hay calificaciones
- El Minilibro de Trucos de Python - Todos Los Ejemplos de Código para Mejorar Tus Scripts PDFDocumento49 páginasEl Minilibro de Trucos de Python - Todos Los Ejemplos de Código para Mejorar Tus Scripts PDFDiego CamachoAún no hay calificaciones
- Práctica IntDocumento2 páginasPráctica Inte.collazosAún no hay calificaciones
- La Librería Científica ScipyDocumento9 páginasLa Librería Científica ScipyHector Antonio Contreras TorrezAún no hay calificaciones
- Interpolación de PolinomiosDocumento17 páginasInterpolación de PolinomiosEdwing MartinezAún no hay calificaciones
- Recuerdo de Python y Arreglos de NumpyDocumento2 páginasRecuerdo de Python y Arreglos de NumpyLady Nicole EsquivelAún no hay calificaciones
- Practica 7Documento32 páginasPractica 7manuelfr99Aún no hay calificaciones
- Matplotlib, Introducción a la Visualización 2D, Parte IDe EverandMatplotlib, Introducción a la Visualización 2D, Parte IAún no hay calificaciones
- Metabolismo de CarbohidratosDocumento14 páginasMetabolismo de CarbohidratosLorenzo Antonio Domínguez FloresAún no hay calificaciones
- Pasos Del Analisis de PuestoDocumento2 páginasPasos Del Analisis de PuestoLorenzo Antonio Domínguez FloresAún no hay calificaciones
- Diagnostico Ambiental EjemploDocumento8 páginasDiagnostico Ambiental EjemploLorenzo Antonio Domínguez FloresAún no hay calificaciones
- Plasmido PBR322Documento1 páginaPlasmido PBR322Lorenzo Antonio Domínguez FloresAún no hay calificaciones
- Libros de La Carrera de MatematicasDocumento21 páginasLibros de La Carrera de MatematicasArturo MartinezAún no hay calificaciones
- Factor de CompresibilidadDocumento16 páginasFactor de Compresibilidadfrankbello1966100% (1)
- Metodos y Tecnicas de EvaluacionDocumento7 páginasMetodos y Tecnicas de EvaluacionMary FuentesAún no hay calificaciones
- Ejercicios Notacion CientificaDocumento2 páginasEjercicios Notacion CientificaCorsary MarrugoAún no hay calificaciones
- 4 Clases AbstractasDocumento10 páginas4 Clases AbstractasManuelAún no hay calificaciones
- Anexo 02 - Reportes de Averia Movistar, Claro, DirectvDocumento2 páginasAnexo 02 - Reportes de Averia Movistar, Claro, Directvcinthia lozano huamanAún no hay calificaciones
- Aprendizaje Basado en RetosDocumento9 páginasAprendizaje Basado en Retosapi-327915504Aún no hay calificaciones
- Evaluativo 4to UnidadIDocumento3 páginasEvaluativo 4to UnidadIRIGOBERTO GONZALES REGALADOAún no hay calificaciones
- Acidos Carboxilicos Parte ExperimentalDocumento11 páginasAcidos Carboxilicos Parte ExperimentalRony Calderon RiveraAún no hay calificaciones
- Contabilidad EmpresasDocumento5 páginasContabilidad Empresasenrique saltosAún no hay calificaciones
- Bitácora Práctica Profesional 1ra Semana Del 05 Al 12 de SeptiembreDocumento2 páginasBitácora Práctica Profesional 1ra Semana Del 05 Al 12 de SeptiembrerichardAún no hay calificaciones
- Evolucion de Las LamparasDocumento12 páginasEvolucion de Las LamparasIsidoro HernandezAún no hay calificaciones
- Ejercicios Mur y Muv Casa 2Documento1 páginaEjercicios Mur y Muv Casa 2Alex Enrique Acosta RamosAún no hay calificaciones
- 5 - Guia - ElectrodinamicaDocumento6 páginas5 - Guia - ElectrodinamicaLeo MartinAún no hay calificaciones
- Teoría de La Evolución QuímicaDocumento13 páginasTeoría de La Evolución QuímicaEduardo Torres100% (2)
- Determinación de La MisiónDocumento2 páginasDeterminación de La MisióntronkysAún no hay calificaciones
- Tu Pago Mensual Será de $3,099.00 Durante 12 Meses: Préstamo Digital BancoppelDocumento1 páginaTu Pago Mensual Será de $3,099.00 Durante 12 Meses: Préstamo Digital BancoppelIrma Pérez OchoaAún no hay calificaciones
- Fase 1 Reconocimiento Del CursoDocumento7 páginasFase 1 Reconocimiento Del CursoDiana Marcela Garcia Gonzalez100% (1)
- Ejemplo de Texto Argumentativo Sobre La IntolerancDocumento8 páginasEjemplo de Texto Argumentativo Sobre La IntolerancĽibeth VanessaAún no hay calificaciones
- El Ojo Humano Como Detector AstronómicoDocumento2 páginasEl Ojo Humano Como Detector AstronómicoRocíoAntaramiánAún no hay calificaciones
- Ejercicios Miniterminos y Maxiterminos U 2Documento1 páginaEjercicios Miniterminos y Maxiterminos U 2Chuchuy ChocochuyAún no hay calificaciones
- Instituto Superior Tecnológico Oyon - (Oyon - Lima - Peru)Documento1 páginaInstituto Superior Tecnológico Oyon - (Oyon - Lima - Peru)howerth parianAún no hay calificaciones
- CV Hugo Valerio 2021Documento3 páginasCV Hugo Valerio 2021nelida ramos floresAún no hay calificaciones
- Cuento y Fabulas InfantilesDocumento26 páginasCuento y Fabulas InfantilesPamela MontalvoAún no hay calificaciones
- Empresa ColombinaDocumento10 páginasEmpresa ColombinaDiarli AhumadaAún no hay calificaciones
- Tráfico Fluvial en EuropaDocumento24 páginasTráfico Fluvial en Europakiluha89Aún no hay calificaciones
- Perfiles de Cargo en SelecciónDocumento12 páginasPerfiles de Cargo en Selecciónjohn_722Aún no hay calificaciones
- Deber 20 - Attempt ReviewDocumento14 páginasDeber 20 - Attempt ReviewAldrin EspinozaAún no hay calificaciones
- Diferencias Entre Uniones Empernadas y Uniones SoldadasDocumento7 páginasDiferencias Entre Uniones Empernadas y Uniones SoldadasMarquito34Aún no hay calificaciones
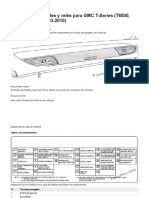
- Digrama Fusibles GMC t7500 2006Documento8 páginasDigrama Fusibles GMC t7500 2006ObedAlvaradoAún no hay calificaciones