También podría gustarte
- Distancias en AstronomíaDocumento8 páginasDistancias en AstronomíaJAVIER DE LUCASAún no hay calificaciones
- Ramas de La Geodesia PDFDocumento11 páginasRamas de La Geodesia PDFAndrea BnAún no hay calificaciones
- GeodesiaDocumento24 páginasGeodesiaTateReadyAún no hay calificaciones
- TARE A 1 EratóstenesDocumento7 páginasTARE A 1 EratóstenesDennis David MartinezAún no hay calificaciones
- Como Funciona Un Estroboscopio y para Que Se UsaDocumento2 páginasComo Funciona Un Estroboscopio y para Que Se UsaRodrigo Betancourt67% (3)
- Cap.03. - Apartamiento y La Estima GraficaDocumento11 páginasCap.03. - Apartamiento y La Estima GraficaAriel Aguirre 15173645Aún no hay calificaciones
- HomoteciaDocumento14 páginasHomoteciaChristian De OleoAún no hay calificaciones
- Diametro de La TierraDocumento14 páginasDiametro de La TierraMaria Serrano ReyesAún no hay calificaciones
- Aplicacion de La Trigonometria A La Solucion de ProblemasDocumento19 páginasAplicacion de La Trigonometria A La Solucion de Problemasestuardocaal100% (2)
- Cap.03. - Apartamiento y La Estima GraficaDocumento13 páginasCap.03. - Apartamiento y La Estima Graficaagurz100% (1)
- Sistema de Posicionamiento Global (GPS)Documento90 páginasSistema de Posicionamiento Global (GPS)Loc Das NeyfusAún no hay calificaciones
- Proyecto 1er Parcial. Grupo 2Documento11 páginasProyecto 1er Parcial. Grupo 2EDUARDO JAVIER Matamoros AguileraAún no hay calificaciones
- Resumen de TopografiaDocumento16 páginasResumen de Topografiasofia rojasAún no hay calificaciones
- Geodesia Azimut AstronomicoDocumento36 páginasGeodesia Azimut AstronomicoAdriana Michelle100% (1)
- Informe N 1 Introducci N A La Astronom ADocumento6 páginasInforme N 1 Introducci N A La Astronom AJOSE GABRIEL HUACACHI BAZANAún no hay calificaciones
- Paralajes Estelares PDFDocumento8 páginasParalajes Estelares PDFHéctor NavarroAún no hay calificaciones
- Resolución de Triángulos IphoneDocumento2 páginasResolución de Triángulos Iphonefco_josenicolasAún no hay calificaciones
- Geomatica-Definición y Reseña Historica - ProyeccionesDocumento35 páginasGeomatica-Definición y Reseña Historica - ProyeccionesjustorfcAún no hay calificaciones
- Eratotenes y El Rayo de La TierraDocumento3 páginasEratotenes y El Rayo de La TierrahetsudoyaguiuAún no hay calificaciones
- Problema España PDFDocumento3 páginasProblema España PDFNwar BoainyAún no hay calificaciones
- Tarea 4 - Sistemas de Referencia y ProyeccionesDocumento9 páginasTarea 4 - Sistemas de Referencia y ProyeccionesJhonson Power Andrade OrdoñezAún no hay calificaciones
- Cálculo de ángulos de elevación y azimuth para comunicación satelitalDocumento5 páginasCálculo de ángulos de elevación y azimuth para comunicación satelitalAndres SalaAún no hay calificaciones
- Fotogrametria Por SateliteDocumento7 páginasFotogrametria Por SateliteWilly MerloAún no hay calificaciones
- Curso de TopografiaDocumento10 páginasCurso de TopografiaCarmarys ZabalaAún no hay calificaciones
- Localizacion y Direccion-STRAHLERDocumento13 páginasLocalizacion y Direccion-STRAHLERMarilin Quispe GuzmanAún no hay calificaciones
- Elementos de Matem Aticas y Aplicaciones: Curso 2020-2021Documento2 páginasElementos de Matem Aticas y Aplicaciones: Curso 2020-2021LuisCalderónAún no hay calificaciones
- Triangulacion TrilateracionDocumento13 páginasTriangulacion TrilateracionMarcus Reyes100% (1)
- OLAA 2013 Bolivia - TeoricaDocumento9 páginasOLAA 2013 Bolivia - TeoricaAstronomía RadiofónicaAún no hay calificaciones
- Prueba Asincrónica III OSA 2023Documento10 páginasPrueba Asincrónica III OSA 2023Jose Gabriel Romero MineroAún no hay calificaciones
- InformeDocumento21 páginasInformexadezAún no hay calificaciones
- Problemas Enunciados 1617Documento12 páginasProblemas Enunciados 1617Gizmico CarroAún no hay calificaciones
- EJERCICIOSDocumento1 páginaEJERCICIOSAna MirandaAún no hay calificaciones
- Astronomia y Geodesia - Esfera CelesteDocumento18 páginasAstronomia y Geodesia - Esfera CelestemaxAún no hay calificaciones
- Tarea07 FilosofiaDocumento8 páginasTarea07 FilosofiaWorren SuarezAún no hay calificaciones
- QUISHPE MIREYA PracticanDocumento12 páginasQUISHPE MIREYA PracticanMIREYA MISHELL QUISHPE QUISHPEAún no hay calificaciones
- Coordenadas CelestesDocumento6 páginasCoordenadas CelestesRocio Joya100% (1)
- LambertDocumento4 páginasLambertAndré EspinozaAún no hay calificaciones
- AsteroidesDocumento6 páginasAsteroidesklinsman Huaman PrincipeAún no hay calificaciones
- Cap 2 - Parámetros EstelaresDocumento59 páginasCap 2 - Parámetros EstelaresDaniel Jose MendiciniAún no hay calificaciones
- Determinacion de La Latitud Y La Longitud Por El Metodo de Alturas IgualesDocumento41 páginasDeterminacion de La Latitud Y La Longitud Por El Metodo de Alturas IgualesALITA MOLIAún no hay calificaciones
- Solucion Taller 1Documento3 páginasSolucion Taller 1Alejandro MayaAún no hay calificaciones
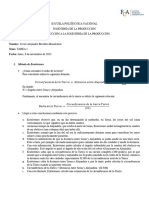
- IIP Tarea 1 Javier - BustillosDocumento3 páginasIIP Tarea 1 Javier - BustillosJavier AlejandroAún no hay calificaciones
- QUISHPE MIREYA Practica6Documento13 páginasQUISHPE MIREYA Practica6MIREYA MISHELL QUISHPE QUISHPEAún no hay calificaciones
- Proyecciones y DatumDocumento26 páginasProyecciones y DatumMADIUR100% (3)
- GPS's y Geometria AnaliticaDocumento4 páginasGPS's y Geometria AnaliticarrvvAún no hay calificaciones
- Trabajo de Electivo MatemáticasDocumento4 páginasTrabajo de Electivo MatemáticasJISSET33Aún no hay calificaciones
- Solucion Taller 1Documento3 páginasSolucion Taller 1Alejandro MayaAún no hay calificaciones
- Coordenadas PolaresDocumento6 páginasCoordenadas PolaresRuben BenitezAún no hay calificaciones
- Sismica Teoria Sobre OndasDocumento11 páginasSismica Teoria Sobre OndasdavidflorianAún no hay calificaciones
- PársecDocumento6 páginasPársecBENJAMIN WESLEY MENDOZA GOMEZAún no hay calificaciones
- IFM T CinematicaRelativistaDocumento3 páginasIFM T CinematicaRelativistaJosé A. MonjarazAún no hay calificaciones
- GEODESIAS Cap. 2 - Nociones de GeodesiaDocumento19 páginasGEODESIAS Cap. 2 - Nociones de Geodesiajavier blanco floresAún no hay calificaciones
- Preguntas de Geomatica-ZabalagaDocumento3 páginasPreguntas de Geomatica-ZabalagaRamirez Chinche Jose LuisAún no hay calificaciones
- La ComunicaciónDocumento7 páginasLa ComunicaciónEsteban ChavesAún no hay calificaciones
- Ancon Isabel v1Documento10 páginasAncon Isabel v1eduardo1823Aún no hay calificaciones
- El Código Cósmico: Un Enigma Celeste Historia, Relatividad Y Agujeros Negros Partes Ii Y IiiDe EverandEl Código Cósmico: Un Enigma Celeste Historia, Relatividad Y Agujeros Negros Partes Ii Y IiiAún no hay calificaciones
- La estructura del universoDocumento8 páginasLa estructura del universoNicolas GutierrezAún no hay calificaciones
- 34 ConstelacionesDocumento12 páginas34 ConstelacionesNicolas GutierrezAún no hay calificaciones
- Conversion UnidadesDocumento1 páginaConversion UnidadesWillian LtcAún no hay calificaciones
- 35 Magnitudes EstelaresDocumento11 páginas35 Magnitudes EstelaresNicolas GutierrezAún no hay calificaciones
- 31 Relación Entre La Astronomía y La GeodesiaDocumento9 páginas31 Relación Entre La Astronomía y La GeodesiaNicolas GutierrezAún no hay calificaciones
- Medicion de Aungulos Horizontales y Operaciones de Campo Con El Transito o TeodolitoDocumento4 páginasMedicion de Aungulos Horizontales y Operaciones de Campo Con El Transito o TeodolitoEdy Leon ChavezAún no hay calificaciones
- Triangulacion TopograficaDocumento3 páginasTriangulacion TopograficaAndres Ramos MavilaAún no hay calificaciones
- If-2021-00774167-Neu-Plpres%upefeDocumento85 páginasIf-2021-00774167-Neu-Plpres%upefeNicolas GutierrezAún no hay calificaciones
- Mejoramiento Ruta Provincial 23 entre Ruta Nacional 242 y Ruta Provincial 13Documento7 páginasMejoramiento Ruta Provincial 23 entre Ruta Nacional 242 y Ruta Provincial 13Nicolas GutierrezAún no hay calificaciones
- If-2021-00950567-Neu-Plpres%upefeDocumento64 páginasIf-2021-00950567-Neu-Plpres%upefeNicolas GutierrezAún no hay calificaciones
- ComputosDocumento2 páginasComputosNicolas GutierrezAún no hay calificaciones
- If-2021-00774182-Neu-Plpres%upefeDocumento7 páginasIf-2021-00774182-Neu-Plpres%upefeNicolas GutierrezAún no hay calificaciones
- Tarea - UniversoDocumento1 páginaTarea - UniversoJordy J. Cordova MaytaAún no hay calificaciones
- U2A3 Equipo9Documento6 páginasU2A3 Equipo9DANIEL ALEJANDRO CONTRERAS ARREDONDOAún no hay calificaciones
- Evolución estelar: nacimiento, vida y muerte de las estrellasDocumento5 páginasEvolución estelar: nacimiento, vida y muerte de las estrellasJose MoraAún no hay calificaciones
- 1 Principios Basicos EltDocumento61 páginas1 Principios Basicos EltDario Gabriel Coz RojasAún no hay calificaciones
- El Universo 4°Documento3 páginasEl Universo 4°Duverney Mendez BurgosAún no hay calificaciones
- LeyesDocumento41 páginasLeyesSTEVEN KELLYAún no hay calificaciones
- Movimiento Tierra y GravedadDocumento3 páginasMovimiento Tierra y GravedadOrlando GarciaAún no hay calificaciones
- Cuerpos CelestesDocumento9 páginasCuerpos CelestesmartemarAún no hay calificaciones
- Examen Diagnostico Aprendamos Juntos EspañolDocumento22 páginasExamen Diagnostico Aprendamos Juntos EspañolZamy LopezAún no hay calificaciones
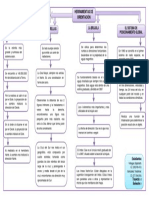
- Herramientas de orientaciónDocumento1 páginaHerramientas de orientaciónSophiath VillegasAún no hay calificaciones
- Intro - Campo GravitacionalDocumento14 páginasIntro - Campo GravitacionalLaura EscobarAún no hay calificaciones
- 03 Cuadernillo ExploradorDocumento52 páginas03 Cuadernillo Exploradorclafern128Aún no hay calificaciones
- Nodos Lunares. Guía para Principiantes - Mia Astral - Clases en Línea de Astrología y CoachingDocumento3 páginasNodos Lunares. Guía para Principiantes - Mia Astral - Clases en Línea de Astrología y CoachingHildaAún no hay calificaciones
- Geminis AstrologiaDocumento2 páginasGeminis AstrologiaDario BalcazarAún no hay calificaciones
- Teoria Del UniversoDocumento4 páginasTeoria Del UniversojavierAún no hay calificaciones
- NefertitiDocumento3 páginasNefertitiMarga9999Aún no hay calificaciones
- Cuadro Comparativo FisicaDocumento6 páginasCuadro Comparativo FisicaJose Alfredo Rendon0% (1)
- Evaluacion El UniversoDocumento6 páginasEvaluacion El UniversoKambuzanu DaniluAún no hay calificaciones
- El Renacimiento (Exposicion)Documento11 páginasEl Renacimiento (Exposicion)Elio SuarezAún no hay calificaciones
- Adicional InvestigacionDocumento6 páginasAdicional InvestigacionAna García LópezAún no hay calificaciones
- Manual de Revolución SolarDocumento7 páginasManual de Revolución Solargabitor100% (1)
- ORIENTACIÓN Cs Naturales - Fisica y AstronomiaDocumento11 páginasORIENTACIÓN Cs Naturales - Fisica y AstronomiaDiego DelgadoAún no hay calificaciones
- I BIM - 4to. Año - GEOG - Guía 1 - Teoría GeográficaDocumento4 páginasI BIM - 4to. Año - GEOG - Guía 1 - Teoría GeográficaJen TorresAún no hay calificaciones
- Origen Del Universo MontessoriDocumento9 páginasOrigen Del Universo MontessoriPaula BAún no hay calificaciones
- Ib 5ccss Ficha2 La TierraDocumento5 páginasIb 5ccss Ficha2 La TierraBurgos S. Dayanara 3BAún no hay calificaciones
- Taller Evaluativo de Notacion Cientifica PDFDocumento2 páginasTaller Evaluativo de Notacion Cientifica PDFMercedes Bou BolinchesAún no hay calificaciones
- El Arte de Pablo (Ars Paulina) 1ra ParteDocumento5 páginasEl Arte de Pablo (Ars Paulina) 1ra ParteAlejandro Venegas100% (1)
- Leyes KeplerDocumento3 páginasLeyes KeplerAndres Santiago Gomez ReyesAún no hay calificaciones
- Profesiones en AstrologiaDocumento6 páginasProfesiones en AstrologiaLibreria AstartéAún no hay calificaciones
- El Azar y La Suerte en La Astrología - Ezequiel Sanchez v2Documento27 páginasEl Azar y La Suerte en La Astrología - Ezequiel Sanchez v2Ezequiel Sanchez100% (2)