También podría gustarte
- Degustação Blumer TraducidoDocumento23 páginasDegustação Blumer TraducidoJuan Antonio Hernández Cital100% (1)
- UF0852 - Instalación y actualización de sistemas operativosDe EverandUF0852 - Instalación y actualización de sistemas operativosCalificación: 5 de 5 estrellas5/5 (1)
- Unidad II Administracion de Procesos y El Procesador 2.1 Concepto de ProcesosDocumento6 páginasUnidad II Administracion de Procesos y El Procesador 2.1 Concepto de ProcesosjhiecooAún no hay calificaciones
- ActivitatM01 UF1 NF2 A02 1EstadoycontroldeprocesosenLinuxDocumento15 páginasActivitatM01 UF1 NF2 A02 1EstadoycontroldeprocesosenLinuxDani Smx2M08Aún no hay calificaciones
- Unidad 2 Procesos PDFDocumento98 páginasUnidad 2 Procesos PDFChristian Espinosa GalindoAún no hay calificaciones
- 02 ProcesosDocumento46 páginas02 ProcesosPedro ContrerasAún no hay calificaciones
- Aso - Unidad Ii - Procesos-C1-Introducción-2023Documento37 páginasAso - Unidad Ii - Procesos-C1-Introducción-2023Pablo MairenaAún no hay calificaciones
- ProcesoDocumento11 páginasProcesoOmar Eduardo Moreno NandayapaAún no hay calificaciones
- Gestion de Procesos en LinuxDocumento14 páginasGestion de Procesos en LinuxCastro CRAún no hay calificaciones
- Procesos e HilosDocumento35 páginasProcesos e HilosAndrea MurilloAún no hay calificaciones
- 2022 SO - TE 03 - Procesos - IntroducciónDocumento17 páginas2022 SO - TE 03 - Procesos - IntroducciónJorge Sari Di FabioAún no hay calificaciones
- Admnistracion Procesos LinuxDocumento32 páginasAdmnistracion Procesos Linuxjaime morenoAún no hay calificaciones
- Jerarquía de ProcesosDocumento4 páginasJerarquía de ProcesosARMANDOAún no hay calificaciones
- Proceso SDocumento16 páginasProceso SАдриан БандаAún no hay calificaciones
- Material de Cátedra - LINUX - Capítulo 8Documento22 páginasMaterial de Cátedra - LINUX - Capítulo 8Juan MolinaAún no hay calificaciones
- Iso 01Documento31 páginasIso 01Alberto AliagaAún no hay calificaciones
- Procesos e HilosDocumento33 páginasProcesos e HilosAndre RomeroAún no hay calificaciones
- Ensayo Ingles SODocumento6 páginasEnsayo Ingles SODaniel GonzálezAún no hay calificaciones
- Capítulo 3: Procesos: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocumento60 páginasCapítulo 3: Procesos: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 Edition_carolaAún no hay calificaciones
- Procesos Ubuntu PDFDocumento3 páginasProcesos Ubuntu PDFAndres De PazAún no hay calificaciones
- S03.s3 - Material PDFDocumento39 páginasS03.s3 - Material PDFAlbert RomeroAún no hay calificaciones
- Guia Gestion de ProcesosDocumento8 páginasGuia Gestion de ProcesosPatricia Alejandra BlancoAún no hay calificaciones
- Funciones SDocumento6 páginasFunciones Slkk974827Aún no hay calificaciones
- Practica 18Documento6 páginasPractica 18josemapoloAún no hay calificaciones
- Gestion de ProcesosDocumento4 páginasGestion de Procesosedu2991Aún no hay calificaciones
- Algoritmos PlanificacionDocumento20 páginasAlgoritmos PlanificacionBeatrizAún no hay calificaciones
- B1 T02 Gestion de ProcesosDocumento5 páginasB1 T02 Gestion de ProcesosJuanjoAún no hay calificaciones
- Trabajo Individual 2 - GonzaloDocumento8 páginasTrabajo Individual 2 - GonzaloSandra100% (1)
- 08.1 - Apuntes - Planificación de ProcesosDocumento19 páginas08.1 - Apuntes - Planificación de ProcesosxanaxnaxanAún no hay calificaciones
- Paso 3 - Grupo-22 - Andres Felipe RiosDocumento8 páginasPaso 3 - Grupo-22 - Andres Felipe RiosShi No Datenshi100% (1)
- Renzo.... (Autoguardado)Documento6 páginasRenzo.... (Autoguardado)yulexiAún no hay calificaciones
- UT4 ProcesosMemoriaDocumento31 páginasUT4 ProcesosMemoriaIsmael Moral Oliva, delAún no hay calificaciones
- Actividad 4 SODocumento5 páginasActividad 4 SOLuz Adriana Quitumbo SantaAún no hay calificaciones
- 24 Paola - TenorioDocumento14 páginas24 Paola - TenorioKELI JOHANA MOSQUERAAún no hay calificaciones
- Procesos Linuxito PDFDocumento30 páginasProcesos Linuxito PDFGrover CarloAún no hay calificaciones
- Capitulo10 Linux PDFDocumento12 páginasCapitulo10 Linux PDFJuan BernabéAún no hay calificaciones
- Cales 1 de ProcesosDocumento21 páginasCales 1 de ProcesosYeyner LopezAún no hay calificaciones
- 02 TranspSCTR ProcesosDocumento14 páginas02 TranspSCTR ProcesosAdrian Noboa CarrilloAún no hay calificaciones
- Apunte 2do Cuat Sistemas Operativos 1 FINAL - 2014Documento41 páginasApunte 2do Cuat Sistemas Operativos 1 FINAL - 2014Thiago Uriel Guanuco MamaniAún no hay calificaciones
- Funcionamiento Procesos en LinuxDocumento7 páginasFuncionamiento Procesos en LinuxJorge AngaritaAún no hay calificaciones
- Conceptos de ProcesosDocumento17 páginasConceptos de ProcesosAltagracia Adam AngomasAún no hay calificaciones
- Procesos y Administración Del ProcesadorVer2-1Documento13 páginasProcesos y Administración Del ProcesadorVer2-1Onaldo José Quintana WuizeAún no hay calificaciones
- L5 Definición y Gestión de ProyectosDocumento7 páginasL5 Definición y Gestión de Proyectosthemisabogadas mxAún no hay calificaciones
- Capítulo 3 - ProcesosDocumento45 páginasCapítulo 3 - ProcesosramiroestebanAún no hay calificaciones
- Gestión de CPU de WindowsDocumento14 páginasGestión de CPU de WindowsVanesaAún no hay calificaciones
- Administración de Procesos en Sistemas Operativos - Quintana RiosDocumento5 páginasAdministración de Procesos en Sistemas Operativos - Quintana RiosQUINTANA RIOS Mauricio JoelAún no hay calificaciones
- UD7 Monitorizaci N LinuxDocumento6 páginasUD7 Monitorizaci N Linuxmeryluna7337Aún no hay calificaciones
- Presentación Procesos y Multiprogramación PDFDocumento9 páginasPresentación Procesos y Multiprogramación PDFFernando Daniel Tejeda perezAún no hay calificaciones
- Cap 2 - Procesos e HilosDocumento23 páginasCap 2 - Procesos e HilosTrebor CasasAún no hay calificaciones
- Capitulo 6 - Algoritmos de Planificación de ProcesosDocumento35 páginasCapitulo 6 - Algoritmos de Planificación de ProcesosJordy Rojas TorresAún no hay calificaciones
- Sistemas Operativos 2Documento75 páginasSistemas Operativos 2Nancy BarlettaAún no hay calificaciones
- Notas de Clase: Sistemas OperativosDocumento5 páginasNotas de Clase: Sistemas OperativosJ. Tomás Ll. AguileraAún no hay calificaciones
- Parcial Tercer CorteDocumento13 páginasParcial Tercer CorteRafael ManotasAún no hay calificaciones
- Gestión de Procesos y RecursosDocumento9 páginasGestión de Procesos y RecursosJesus ChavezAún no hay calificaciones
- 01 ProcesosDocumento45 páginas01 Procesosbleachcs23Aún no hay calificaciones
- Introducción Procesos AlumnosDocumento20 páginasIntroducción Procesos Alumnosdario perezAún no hay calificaciones
- UntitledDocumento11 páginasUntitledRaul RodriguezAún no hay calificaciones
- Resumen Sistemas OperativosDocumento82 páginasResumen Sistemas OperativosluvatihoneyAún no hay calificaciones
- 5 SO Teo ProcesosDocumento23 páginas5 SO Teo ProcesosCesar GaviriaAún no hay calificaciones
- Práctica 5Documento12 páginasPráctica 5David Esaú LaraAún no hay calificaciones
- Procesos en LinuxDocumento8 páginasProcesos en LinuxMauricio MaldonadoAún no hay calificaciones
- BICSI - Data Center - Riesgos - Bicsi-PlantillaDocumento2 páginasBICSI - Data Center - Riesgos - Bicsi-Plantillajose luis Mittani YauriAún no hay calificaciones
- Pc1 P61ADocumento2 páginasPc1 P61Ajose luis Mittani YauriAún no hay calificaciones
- UNIDAD 1 - Semana 3Documento25 páginasUNIDAD 1 - Semana 3jose luis Mittani YauriAún no hay calificaciones
- IS279 - Sem6 - Actividad - 10Documento5 páginasIS279 - Sem6 - Actividad - 10jose luis Mittani YauriAún no hay calificaciones
- IS279 - Sem2 - Actividad - 3Documento5 páginasIS279 - Sem2 - Actividad - 3jose luis Mittani YauriAún no hay calificaciones
- 6 - A - Explicacion - Instructivo - TF01 - Metodologico 2022-01Documento15 páginas6 - A - Explicacion - Instructivo - TF01 - Metodologico 2022-01jose luis Mittani YauriAún no hay calificaciones
- Plantilla PD3Documento5 páginasPlantilla PD3jose luis Mittani YauriAún no hay calificaciones
- Holgado U201723757 CONSTRUCCIÓN PC1 2022 2 PRUEBADocumento3 páginasHolgado U201723757 CONSTRUCCIÓN PC1 2022 2 PRUEBAjose luis Mittani YauriAún no hay calificaciones
- 5 - Plantilla #05 - TF01 - Trabajo Final - Asesor Metodologo - 2022-01Documento2 páginas5 - Plantilla #05 - TF01 - Trabajo Final - Asesor Metodologo - 2022-01jose luis Mittani YauriAún no hay calificaciones
- Informacio Adicional RoscasDocumento7 páginasInformacio Adicional Roscasjose luis Mittani YauriAún no hay calificaciones
- Semanalización 2021 - 2° PRIM - COMUNICACIÓN - I BIMDocumento4 páginasSemanalización 2021 - 2° PRIM - COMUNICACIÓN - I BIMjose luis Mittani YauriAún no hay calificaciones
- 2021 - I Bim - 2°gra - ValoDocumento2 páginas2021 - I Bim - 2°gra - Valojose luis Mittani YauriAún no hay calificaciones
- El Predicado para Primer Grado de SecundariaDocumento3 páginasEl Predicado para Primer Grado de Secundariajose luis Mittani Yauri50% (2)
- Semanalización 2021 - 2° PRIM - MATEMÁTICA - I BIMDocumento5 páginasSemanalización 2021 - 2° PRIM - MATEMÁTICA - I BIMjose luis Mittani YauriAún no hay calificaciones
- El Verboide para Primer Grado de SecundariaDocumento3 páginasEl Verboide para Primer Grado de SecundariaJuan José Chávez Huamaní50% (2)
- El Adjetivo Determinativo para Primer Grado de SecundariaDocumento4 páginasEl Adjetivo Determinativo para Primer Grado de Secundariajose luis Mittani Yauri50% (2)
- El Sujeto para Primer Grado de SecundariaDocumento3 páginasEl Sujeto para Primer Grado de SecundariaJuan José Chávez Huamaní0% (3)
- El Pronombre para Primer Grado de SecundariaDocumento4 páginasEl Pronombre para Primer Grado de Secundariajose luis Mittani Yauri100% (2)
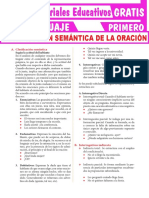
- Clasificación Semántica de La Oración para Primer Grado de SecundariaDocumento3 páginasClasificación Semántica de La Oración para Primer Grado de Secundariajose luis Mittani Yauri100% (1)
- El Signo Lingüístico para Primer Grado de SecundariaDocumento4 páginasEl Signo Lingüístico para Primer Grado de Secundariajose luis Mittani Yauri50% (2)
- Exammensual6to IiibmDocumento4 páginasExammensual6to Iiibmjose luis Mittani YauriAún no hay calificaciones
- El Periódico Mural para Primer Grado de SecundariaDocumento4 páginasEl Periódico Mural para Primer Grado de Secundariajose luis Mittani Yauri0% (1)
- Accidentes Gramaticales Del Sustantivo para Primer Grado de SecundariaDocumento4 páginasAccidentes Gramaticales Del Sustantivo para Primer Grado de SecundariaJuan José Chávez Huamaní0% (1)
- La Revolución Industrial Según Los HistoriadoresDocumento4 páginasLa Revolución Industrial Según Los HistoriadoresMartin Rodriguez BuelaAún no hay calificaciones
- Unidad 2 Hardware y SoftwareDocumento15 páginasUnidad 2 Hardware y SoftwareLuisMarquezCornejoAún no hay calificaciones
- BOLETACUARTODocumento1 páginaBOLETACUARTOJaneth EscobedoAún no hay calificaciones
- 1.5 Planeacion Agregada en El Sector ServicioDocumento5 páginas1.5 Planeacion Agregada en El Sector ServicioRamon Del Toro100% (1)
- DiegoRiaño Fase1 358036 14Documento4 páginasDiegoRiaño Fase1 358036 14Diego Julian RiañoAún no hay calificaciones
- DIARIO DE LANZAROTE - Diciembre de 2021Documento64 páginasDIARIO DE LANZAROTE - Diciembre de 2021Diario de LanzaroteAún no hay calificaciones
- Cuáles Son Las Ventajas y Desventajas de Implementar Un CMR en Una PYME - GERMAN - GARCIA - FILOTHDocumento4 páginasCuáles Son Las Ventajas y Desventajas de Implementar Un CMR en Una PYME - GERMAN - GARCIA - FILOTHBibiana MoreloAún no hay calificaciones
- MANUAL DE GESTION DE LA CALIDAD AVANCE (1) (1) (Deleted)Documento36 páginasMANUAL DE GESTION DE LA CALIDAD AVANCE (1) (1) (Deleted)GuadalupeAún no hay calificaciones
- S15. s2 - Práctica Calificada 2 - Formato UTPDocumento5 páginasS15. s2 - Práctica Calificada 2 - Formato UTPAngel Cortez VivancoAún no hay calificaciones
- Actividad 2 de Situaciones Problemas de Liquidacion de AportesDocumento3 páginasActividad 2 de Situaciones Problemas de Liquidacion de AportesEstefany Peña RamirezAún no hay calificaciones
- Escrito Ofrecimiento de PruebasDocumento6 páginasEscrito Ofrecimiento de Pruebas202047097Aún no hay calificaciones
- Solicitud de Inscripción de Defunción Ocurrida Fuera de EspañaDocumento2 páginasSolicitud de Inscripción de Defunción Ocurrida Fuera de EspañaLeoAún no hay calificaciones
- Punto de EquilibrioDocumento8 páginasPunto de EquilibrioJose GonzalesAún no hay calificaciones
- Resumen RE.I05Documento6 páginasResumen RE.I05Emigdio RODRIGUEZ IZQUIERDOAún no hay calificaciones
- Redaccion Reflexiva2 - Semana 4 - ONCENIODocumento8 páginasRedaccion Reflexiva2 - Semana 4 - ONCENIOFabiola TorresAún no hay calificaciones
- PLAN ANUAL DE TRABAJO 2021 Cetpro San DamianDocumento37 páginasPLAN ANUAL DE TRABAJO 2021 Cetpro San DamianAna Venegas Yupanqui100% (1)
- Packet TracerDocumento4 páginasPacket TracerdanielAún no hay calificaciones
- Directorio Región IcaDocumento2 páginasDirectorio Región IcaDIEGO LEONARDO ASTOCAZA CENTENOAún no hay calificaciones
- Recursos FinancierosDocumento7 páginasRecursos FinancierosJaime Sánchez SánchezAún no hay calificaciones
- Bases de DatosDocumento2 páginasBases de DatosSandry RamírezAún no hay calificaciones
- 2 Convenio Modelo - FormatoDocumento5 páginas2 Convenio Modelo - FormatoVictor Saldaña AlvaAún no hay calificaciones
- Unidad III Desarrollo de PersonalDocumento52 páginasUnidad III Desarrollo de PersonalOlvban100% (1)
- OEM-EIP-1573-15-SHP Rev.0 PDFDocumento175 páginasOEM-EIP-1573-15-SHP Rev.0 PDFJason DennisAún no hay calificaciones
- Coeficiente de Gini - Wikipedia, La Enciclopedia LibreDocumento3 páginasCoeficiente de Gini - Wikipedia, La Enciclopedia LibreKravstoskyAún no hay calificaciones
- Indices SecundariosDocumento9 páginasIndices SecundariosJulián Andrés Gil SantosAún no hay calificaciones
- Flujograma MayiDocumento1 páginaFlujograma MayiDorysAún no hay calificaciones
- Analisis de Codigo de EticaDocumento2 páginasAnalisis de Codigo de EticaAbner Lucas100% (1)
- Desensamble de Una PCDocumento8 páginasDesensamble de Una PCRaphael GarciaAún no hay calificaciones
- Caso de EmprendimientoDocumento38 páginasCaso de EmprendimientoDina Candy Gonzales RoqueAún no hay calificaciones