También podría gustarte
- FALLASDocumento4 páginasFALLASeduardoescorpionAún no hay calificaciones
- Manual Deimos BT Con Central Electronica.lDocumento40 páginasManual Deimos BT Con Central Electronica.lRodrigo Cafee Diaz MezaAún no hay calificaciones
- Practica 13Documento5 páginasPractica 13ails92Aún no hay calificaciones
- Codigus 5 Plus RFDocumento6 páginasCodigus 5 Plus RFBRAVO TECAún no hay calificaciones
- Control de Relés Con Control Remoto IR - DomóticaDocumento10 páginasControl de Relés Con Control Remoto IR - DomóticajbrunobAún no hay calificaciones
- DataKom DKG-705 en EspañolDocumento53 páginasDataKom DKG-705 en EspañolAlfredo Castañeda100% (1)
- Comandos WomDocumento5 páginasComandos WomJosh MarrugoAún no hay calificaciones
- Classic-EDP2 en Es PDFDocumento18 páginasClassic-EDP2 en Es PDFChuz HerreraAún no hay calificaciones
- Trabajo de SemaforosDocumento6 páginasTrabajo de SemaforosSebastian MendozaAún no hay calificaciones
- Generando Codigos en Pic PDFDocumento22 páginasGenerando Codigos en Pic PDFZxdIaminxXzlovewithzxXzyouzxAún no hay calificaciones
- 555 - 556 - 558 Temporizador Oscilador: FUNCIÓN DE CADA PATILLA - Encapsulado de 8 PatillasDocumento11 páginas555 - 556 - 558 Temporizador Oscilador: FUNCIÓN DE CADA PATILLA - Encapsulado de 8 PatillasWilliams OrtizAún no hay calificaciones
- Manual Man312 Cuadro PNG 12 2 ForsaDocumento10 páginasManual Man312 Cuadro PNG 12 2 Forsajosep maria corbella janeAún no hay calificaciones
- Introduccion: GND: Corresponde A La Terminal Negativa de La Alimentación, GeneralmenteDocumento5 páginasIntroduccion: GND: Corresponde A La Terminal Negativa de La Alimentación, GeneralmenteAlejandra BlandonAún no hay calificaciones
- Pirometro AutonicDocumento3 páginasPirometro AutonicShalo ChtAún no hay calificaciones
- Go 30 Ce Julio 2011Documento9 páginasGo 30 Ce Julio 2011rgmaguila1533Aún no hay calificaciones
- Procedimiento de Arranque Black Start de Master Panel - Ms Rev 0Documento7 páginasProcedimiento de Arranque Black Start de Master Panel - Ms Rev 0Jessica EnriquezAún no hay calificaciones
- 7SJ635 V4.4 HV1 10KVDocumento16 páginas7SJ635 V4.4 HV1 10KVaderrlyAún no hay calificaciones
- Reloj Programable Con AtmelHDocumento9 páginasReloj Programable Con AtmelHLCalcinaCmcAún no hay calificaciones
- Programa Prueba Entrenadora ESP32Documento4 páginasPrograma Prueba Entrenadora ESP32jelelectronica3Aún no hay calificaciones
- Tutoriales Del 8 Al 15Documento14 páginasTutoriales Del 8 Al 15Jor ElAún no hay calificaciones
- DKG-705 EspanholDocumento51 páginasDKG-705 EspanholrogerioAún no hay calificaciones
- Mod III Laboratorio v2Documento11 páginasMod III Laboratorio v2Ruben Ricardo Laura CeronAún no hay calificaciones
- Proyecto Arduino - Coche Bluetooth - PDF - Editado2Documento12 páginasProyecto Arduino - Coche Bluetooth - PDF - Editado2Ivan Gavilan SotoAún no hay calificaciones
- Tutoriales Del 8 Al 15Documento14 páginasTutoriales Del 8 Al 15Jor ElAún no hay calificaciones
- Solucion A Falla de Software en Rru de Sitios U850 Caso de Se Queda en Boot y No Arranca SWDocumento5 páginasSolucion A Falla de Software en Rru de Sitios U850 Caso de Se Queda en Boot y No Arranca SWYousef707Aún no hay calificaciones
- 8 Caracteristicas Especiales de La CPU V3 PDFDocumento32 páginas8 Caracteristicas Especiales de La CPU V3 PDFRenny DavidAún no hay calificaciones
- Auto SwitchDocumento3 páginasAuto SwitchJosé A. Montiel QuirósAún no hay calificaciones
- Arduino Control Car V2 byDocumento7 páginasArduino Control Car V2 byJulio Gomez HernándezAún no hay calificaciones
- Lista de Alarmas PDFDocumento177 páginasLista de Alarmas PDFAlfonso Guerrero Rivera0% (1)
- Interrupciones Externas - 1 - y - 2Documento25 páginasInterrupciones Externas - 1 - y - 2Daniela Calero RamírezAún no hay calificaciones
- Manual Del Usuario Maquinas RF3Documento42 páginasManual Del Usuario Maquinas RF3James NoreñaAún no hay calificaciones
- Informe N 1 Alf. Sztuka, Alf ArguelloDocumento15 páginasInforme N 1 Alf. Sztuka, Alf ArguelloDaniel SztukaAún no hay calificaciones
- DKG 705 User-SpanishDocumento51 páginasDKG 705 User-SpanishJaime Ivan VilchisAún no hay calificaciones
- Arduino L298Documento8 páginasArduino L298Adriana Muñoz MuñozAún no hay calificaciones
- Sena Micro1Documento10 páginasSena Micro1Kevin VargasAún no hay calificaciones
- ArduinoDocumento6 páginasArduinoantonioAún no hay calificaciones
- Capitulo 8. Programacion Del PIC 16F876A PDFDocumento36 páginasCapitulo 8. Programacion Del PIC 16F876A PDFEloy TorresAún no hay calificaciones
- Arduino Control Car V2 byDocumento7 páginasArduino Control Car V2 byedithAún no hay calificaciones
- Alarmas Fanuc en EspanolDocumento90 páginasAlarmas Fanuc en EspanolcalejandroAún no hay calificaciones
- COMANDOS1Documento11 páginasCOMANDOS1Omar ZambranoAún no hay calificaciones
- Curso de Arduino MegatronicaDocumento143 páginasCurso de Arduino MegatronicaPablo V Salazar100% (10)
- Curso Consola Robot FanucDocumento19 páginasCurso Consola Robot FanucMajidAmmarAún no hay calificaciones
- Practica de Laboratorio Ci Nee Astable Mono EstableDocumento13 páginasPractica de Laboratorio Ci Nee Astable Mono EstableAndi GrcAún no hay calificaciones
- Sodapdf-Compressed (1) (1) (1) (1) .En - EsDocumento80 páginasSodapdf-Compressed (1) (1) (1) (1) .En - EsHernan Mayna sAún no hay calificaciones
- Calecita Automatica CDocumento32 páginasCalecita Automatica CDiego RomeroAún no hay calificaciones
- Manual Deimos BT Con Central Electronica.lDocumento14 páginasManual Deimos BT Con Central Electronica.lJorgeEstebanParadaMuñozAún no hay calificaciones
- SONY VPCY2 mbx-229 1-09941-1M-CADIZ-CP - 1M - 0424Documento57 páginasSONY VPCY2 mbx-229 1-09941-1M-CADIZ-CP - 1M - 0424dacrysAún no hay calificaciones
- CompilerDocumento6 páginasCompilerAdrianMartinezMendezAún no hay calificaciones
- Router 6000 - Comisionamiento y Script Inicial de ConfiguracionesDocumento5 páginasRouter 6000 - Comisionamiento y Script Inicial de ConfiguracionesIgnacio Cabrera IturraAún no hay calificaciones
- Microcontrolador Dspic VoltimetroDocumento6 páginasMicrocontrolador Dspic VoltimetroChristian QCAún no hay calificaciones
- Practica ServomotoresDocumento5 páginasPractica ServomotoresRODRIGO DE JESUS AGUILAR VAZQUEZAún no hay calificaciones
- CarroDocumento4 páginasCarroGir EstradaAún no hay calificaciones
- Tutorial de ProteusDocumento3 páginasTutorial de ProteusbernardoAún no hay calificaciones
- ElevadoresDocumento16 páginasElevadoresadfa9Aún no hay calificaciones
- Prácticas Arduino VisualinoDocumento37 páginasPrácticas Arduino VisualinoRaúl ConradoAún no hay calificaciones
- Cerradura Eléctrica Con Contraseña de 4 Digitos Usando 1 Solo Botón Con Pic12f629 (Ref001) ADocumento18 páginasCerradura Eléctrica Con Contraseña de 4 Digitos Usando 1 Solo Botón Con Pic12f629 (Ref001) A5tificoAún no hay calificaciones
- Guía de instalación en locales de características especialesDe EverandGuía de instalación en locales de características especialesAún no hay calificaciones
- Mantenimiento de los dispositivos eléctricos de habitáculo y cofre motor. TMVG0209De EverandMantenimiento de los dispositivos eléctricos de habitáculo y cofre motor. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- Guía para rehabilitación de viviendas y pequeños locales afinesDe EverandGuía para rehabilitación de viviendas y pequeños locales afinesAún no hay calificaciones
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Vacunas Dr. PorrasDocumento7 páginasVacunas Dr. PorrasIvan GoldenbergAún no hay calificaciones
- Calculo de La Cantidad de Ladrillos v.1.5 PDFDocumento5 páginasCalculo de La Cantidad de Ladrillos v.1.5 PDFCarlos AyamamaniAún no hay calificaciones
- PILA de CpuDocumento3 páginasPILA de CpuManuel Beltran NoguesAún no hay calificaciones
- Matus. Teoria Del Juego SocialDocumento40 páginasMatus. Teoria Del Juego SocialKbzon Cjs75% (4)
- Guías de Jerusalen TipsDocumento5 páginasGuías de Jerusalen TipsdanielAún no hay calificaciones
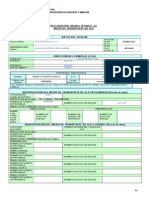
- DJ Medio de Transporte de GLPDocumento4 páginasDJ Medio de Transporte de GLPMoises FloresAún no hay calificaciones
- Linea de Tiempo de La EstadisticaDocumento2 páginasLinea de Tiempo de La EstadisticaYelsin BrinezAún no hay calificaciones
- Informe Gerente PickingDocumento13 páginasInforme Gerente PickingClaudia BgAún no hay calificaciones
- Actividad #5 Ejercios de AutoevaluacionDocumento25 páginasActividad #5 Ejercios de Autoevaluaciondayana0% (1)
- Comunicar Testimonios de Manera Oral PDFDocumento6 páginasComunicar Testimonios de Manera Oral PDFMaribel de la CruzAún no hay calificaciones
- Adicionales de Obra Por ContrataDocumento9 páginasAdicionales de Obra Por ContrataAntonio OtazúAún no hay calificaciones
- Distitron 5119 Elsxq F.T. - EspDocumento1 páginaDistitron 5119 Elsxq F.T. - Espsara.mebautoAún no hay calificaciones
- Cripto AritmeticaDocumento2 páginasCripto AritmeticaCalapuja EduardoAún no hay calificaciones
- Reproduccion AsexualDocumento2 páginasReproduccion AsexualFernandaAún no hay calificaciones
- DISCURSODocumento2 páginasDISCURSODaniel Arellano CornejoAún no hay calificaciones
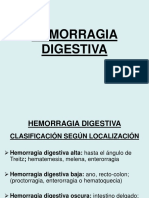
- Hemorragia DigestivaDocumento59 páginasHemorragia Digestivatitolivio89Aún no hay calificaciones
- TAREA QuimicaDocumento13 páginasTAREA QuimicaAlessandro RiquelmeAún no hay calificaciones
- Transmision Señales ConceptosDocumento10 páginasTransmision Señales Conceptosmetaphysics18Aún no hay calificaciones
- Agricultura ExtensivaDocumento5 páginasAgricultura ExtensivaCiberjjuniorAún no hay calificaciones
- Guia Netbeans - Uml Lab. Uml Diagramas Caso de Uso Clases ColaboracionDocumento29 páginasGuia Netbeans - Uml Lab. Uml Diagramas Caso de Uso Clases Colaboracionalexcu02Aún no hay calificaciones
- Resolucion 2318 de 1996 - Expedicion de Licencias en Salud OcupacionalDocumento4 páginasResolucion 2318 de 1996 - Expedicion de Licencias en Salud Ocupacionalsaludocupacionalsas100% (1)
- Proyecto de ExportacionDocumento8 páginasProyecto de ExportacionGiNo Quiñones AlvarezAún no hay calificaciones
- Tubos Cuadrados y Rectangulares A500 PDFDocumento1 páginaTubos Cuadrados y Rectangulares A500 PDFRafael RiveraAún no hay calificaciones
- Líquido Amniótico 2014Documento5 páginasLíquido Amniótico 2014daniloAún no hay calificaciones
- Administracion Cientifica AtrDocumento9 páginasAdministracion Cientifica AtrSteven GavilánAún no hay calificaciones
- Energy 70 Series ManualDocumento102 páginasEnergy 70 Series ManualFrancisco Ruiz CasasAún no hay calificaciones
- Arritmias y Trastornos de ConduccionDocumento10 páginasArritmias y Trastornos de ConduccionAndres M Na RAún no hay calificaciones
- Diseño Sifones - Jose Arbulu - Parte-IIDocumento50 páginasDiseño Sifones - Jose Arbulu - Parte-IIJoseOmarSantamariaSandovalAún no hay calificaciones
- Nueva Herramientas de Recopilacion y Mejora de ProcesosDocumento19 páginasNueva Herramientas de Recopilacion y Mejora de Procesosdaniels2020Aún no hay calificaciones
- Pies en Polvorosa ComentarioDocumento9 páginasPies en Polvorosa ComentariocepermotrilAún no hay calificaciones