También podría gustarte
- Carta de LaicidadDocumento2 páginasCarta de LaicidadAngel Arcadio Cz100% (1)
- Que Tipos de Vernier ExistenDocumento9 páginasQue Tipos de Vernier ExistenDani González100% (5)
- Ensayo TanatologíaDocumento10 páginasEnsayo TanatologíaAngel Arcadio Cz75% (4)
- Ejercicios Propuestos PERT CPMDocumento3 páginasEjercicios Propuestos PERT CPMpauloAún no hay calificaciones
- DiferenciaPotencialEléctricaDocumento3 páginasDiferenciaPotencialEléctricaKhriztianJuarez100% (1)
- Valvulas de ControlDocumento8 páginasValvulas de ControlJulitza MierezAún no hay calificaciones
- Valvulas de ControlDocumento8 páginasValvulas de ControlJulitza MierezAún no hay calificaciones
- Ejercicios ArduinoDocumento11 páginasEjercicios Arduinoolaff jardinez morenoAún no hay calificaciones
- Minisumo Ejemplo Codigo Completo PDFDocumento4 páginasMinisumo Ejemplo Codigo Completo PDFAnderson Steven Caballero BarbosaAún no hay calificaciones
- Correlaciones PVTDocumento331 páginasCorrelaciones PVTAngel Arcadio CzAún no hay calificaciones
- Codigo Ascensor 4 Pisos en ArduinoDocumento8 páginasCodigo Ascensor 4 Pisos en Arduinojairo alfonso jimenez jimenezAún no hay calificaciones
- Fallas en El Pavimento AsfalticoDocumento5 páginasFallas en El Pavimento AsfalticoDanilo TipanAún no hay calificaciones
- Código ArduinoDocumento4 páginasCódigo Arduinocarlos eduardo cruz rodriguezAún no hay calificaciones
- Ascensor Con ArduinoDocumento4 páginasAscensor Con ArduinoMarcoBFAún no hay calificaciones
- Proyecto de ICTDocumento6 páginasProyecto de ICTManuel Rudas SanchezAún no hay calificaciones
- Codificación Semaforo Peatonal Con ArduinoDocumento2 páginasCodificación Semaforo Peatonal Con ArduinoRobert GalargaAún no hay calificaciones
- Codigo Mesa SismicaDocumento5 páginasCodigo Mesa Sismica0AvendanoAún no hay calificaciones
- Texto2 0Documento5 páginasTexto2 0JJGAMERAún no hay calificaciones
- Ascensor de Tres Pisos Con ArduinoDocumento13 páginasAscensor de Tres Pisos Con ArduinoSergioAún no hay calificaciones
- Actividad 3. Arduino Basico SenaDocumento11 páginasActividad 3. Arduino Basico SenaJader Funez Olivera100% (1)
- Código ArduinoDocumento3 páginasCódigo ArduinoKevin PorrasAún no hay calificaciones
- Semaforo Con Arduino PDFDocumento3 páginasSemaforo Con Arduino PDFGustavo hernandezAún no hay calificaciones
- Ejemplos Con ArduinoDocumento6 páginasEjemplos Con Arduinocesar optimusAún no hay calificaciones
- Seguidor de Línea VelozDocumento3 páginasSeguidor de Línea VelozJhon Jairo Cargua Quishpe100% (1)
- Actividad 10Documento3 páginasActividad 10Alexander WalkerAún no hay calificaciones
- Secuencias de LucesDocumento10 páginasSecuencias de LucesAngelaJuyoRondonAún no hay calificaciones
- El Arranque en Estrella y Triangulo Con Arduino PDFDocumento3 páginasEl Arranque en Estrella y Triangulo Con Arduino PDFyomar50% (4)
- Ejemplos_Arduino_Sentencias_Control_LEDsDocumento6 páginasEjemplos_Arduino_Sentencias_Control_LEDscesarAún no hay calificaciones
- Practicas Kit Basico ArduinoDocumento27 páginasPracticas Kit Basico ArduinoFernando TorresAún no hay calificaciones
- Const Int Motorpin1Documento2 páginasConst Int Motorpin1RoldanAún no hay calificaciones
- Infore L Lab Electronica LLDocumento5 páginasInfore L Lab Electronica LLJUAN MANUEL PERDOMO GUTIERREZAún no hay calificaciones
- Trabajo Arduino Chávez ErickDocumento7 páginasTrabajo Arduino Chávez ErickErik Thiago XavezAún no hay calificaciones
- Proyecto de Luces ElectrónicaDocumento11 páginasProyecto de Luces ElectrónicaRodrigo RamirezAún no hay calificaciones
- Programa Del Control de Temperatura y Nivel ArduinoDocumento6 páginasPrograma Del Control de Temperatura y Nivel ArduinoMaxOsmarkPayeeApazaAún no hay calificaciones
- ROBOTDocumento4 páginasROBOTJhonnySanchezAún no hay calificaciones
- Tarea DisproDocumento4 páginasTarea DisproYecid RomeroAún no hay calificaciones
- Codigo Integracion PastilleroDocumento6 páginasCodigo Integracion PastilleroDiego Fernando SalamancaAún no hay calificaciones
- Movimiento Eje XDocumento2 páginasMovimiento Eje XMario Ayil HuicabAún no hay calificaciones
- Ejercicios Con ArduinoDocumento19 páginasEjercicios Con ArduinoRubén BecerraAún no hay calificaciones
- Renzo Sacaca Lab1Documento8 páginasRenzo Sacaca Lab1Renzo FavioAún no hay calificaciones
- Codigo Motor Paso A Paso AduinoDocumento3 páginasCodigo Motor Paso A Paso AduinoPiero Pisfil PuiconAún no hay calificaciones
- Practica Con ArduinoDocumento16 páginasPractica Con ArduinoBryanne Huaman Caceres0% (2)
- Informe 4 Microcontroladores y MicroprocesadoresDocumento10 páginasInforme 4 Microcontroladores y MicroprocesadoreschrflomAún no hay calificaciones
- Tarea Virtual # 3 FUNDAMENTOS DE ELECTRONICADocumento6 páginasTarea Virtual # 3 FUNDAMENTOS DE ELECTRONICAJUAN PLAZAAún no hay calificaciones
- Otro Codigo para ArduinoDocumento2 páginasOtro Codigo para ArduinopatriciaAún no hay calificaciones
- Funcionamiento de interrupciones y timers en PICDocumento3 páginasFuncionamiento de interrupciones y timers en PICValentina SalazarAún no hay calificaciones
- T4Documento2 páginasT4Yukary AlarconAún no hay calificaciones
- Simon Dice 2 Botones CodigoDocumento9 páginasSimon Dice 2 Botones CodigoIgnacioAún no hay calificaciones
- Librería para El Control de ServomotoresDocumento7 páginasLibrería para El Control de ServomotoresAdelaidoAún no hay calificaciones
- Programas ArduinoDocumento15 páginasProgramas ArduinoDaniel Tenezaca BejaranoAún no hay calificaciones
- Guia ArduinoDocumento29 páginasGuia ArduinoHugoCarbajalRiosAún no hay calificaciones
- Codigo Control Ascensor ArduinoDocumento8 páginasCodigo Control Ascensor Arduinojuan0537Aún no hay calificaciones
- Codigo Carro BluetoothDocumento3 páginasCodigo Carro BluetoothJhonatan Andres Lamus FigueroaAún no hay calificaciones
- Interrupciones, Adc y PWM Practica 3Documento8 páginasInterrupciones, Adc y PWM Practica 3Marco A RichterAún no hay calificaciones
- Codigo Servo UltrasonidoDocumento2 páginasCodigo Servo UltrasonidoAnonymous IuHX8xAún no hay calificaciones
- IoT Taller ArduinoDocumento17 páginasIoT Taller ArduinoJohan Andres ARIAS CADAVIDAún no hay calificaciones
- Reporte Del Examen PrácticoDocumento8 páginasReporte Del Examen PrácticoJhonn C Ccopa SupoAún no hay calificaciones
- Programando 1Documento16 páginasProgramando 1Queren Saldaña MioAún no hay calificaciones
- Calculadora Suma Resta Multiplicación y DivisionDocumento25 páginasCalculadora Suma Resta Multiplicación y Divisiondylan castroAún no hay calificaciones
- TINKERCADDocumento5 páginasTINKERCADValeria ChavezAún no hay calificaciones
- Proyecto CarcelDocumento8 páginasProyecto CarcelArmando Rojas RojasAún no hay calificaciones
- NVERNADERODocumento6 páginasNVERNADEROJhonattan JavierAún no hay calificaciones
- ArduinoServoPotDocumento1 páginaArduinoServoPotAndrés Felipe QuinteroAún no hay calificaciones
- Prácticas de Motores A PasosDocumento23 páginasPrácticas de Motores A PasosEdgar Ubaldo Correa GrandeAún no hay calificaciones
- El robot BluetoothDocumento8 páginasEl robot Bluetootha637888Aún no hay calificaciones
- Codigo de Suma y RestaDocumento2 páginasCodigo de Suma y RestaYamile FloresAún no hay calificaciones
- Mejorado Dec A BinDocumento2 páginasMejorado Dec A BinJUAN CARLOS PELAEZ MARTINEZAún no hay calificaciones
- Informe de Algoritmo de PLC para Controlar Un AscensorDocumento25 páginasInforme de Algoritmo de PLC para Controlar Un AscensorKarlos EsmuzAún no hay calificaciones
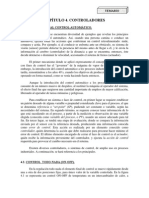
- Capitulo 4. ControladoresDocumento15 páginasCapitulo 4. ControladoresVictor MontesAún no hay calificaciones
- Arian RTD ConexxionesDocumento6 páginasArian RTD ConexxionesJose Ramon Escobar AlfaroAún no hay calificaciones
- Tablas Generales de ConductoresDocumento13 páginasTablas Generales de ConductoresAngel Arcadio CzAún no hay calificaciones
- Preguntas Fisiopatología - Dulce Mariela Montoya MariscalDocumento12 páginasPreguntas Fisiopatología - Dulce Mariela Montoya MariscalAngel Arcadio CzAún no hay calificaciones
- Preg, Fisiopatologia #1Documento7 páginasPreg, Fisiopatologia #1Angel Arcadio CzAún no hay calificaciones
- Flujo de Fluidos Casos TipicosDocumento10 páginasFlujo de Fluidos Casos TipicosTito Rojas VargasAún no hay calificaciones
- POWER BI y Reporte de NEgDocumento2 páginasPOWER BI y Reporte de NEgAngel Arcadio CzAún no hay calificaciones
- Info Mediciones ElectricasDocumento2 páginasInfo Mediciones ElectricasAngel Arcadio CzAún no hay calificaciones
- Info Mediciones ElectricasDocumento2 páginasInfo Mediciones ElectricasAngel Arcadio CzAún no hay calificaciones
- Arduino + LCD JHD 162ADocumento1 páginaArduino + LCD JHD 162AAngel Arcadio CzAún no hay calificaciones
- Arduino + LCD JHD 162ADocumento1 páginaArduino + LCD JHD 162AAngel Arcadio CzAún no hay calificaciones
- Cursos y Talleres 2015Documento4 páginasCursos y Talleres 2015Angel Arcadio CzAún no hay calificaciones
- (PLC Scada) - Introduccion Al ScadaDocumento30 páginas(PLC Scada) - Introduccion Al ScadaCésar AugustoAún no hay calificaciones
- Power BIDocumento2 páginasPower BIAngel Arcadio CzAún no hay calificaciones
- Exámen Ordinario Unidad 3 FácilDocumento3 páginasExámen Ordinario Unidad 3 FácilAngel Arcadio CzAún no hay calificaciones
- MondayDocumento1 páginaMondayAngel Arcadio CzAún no hay calificaciones
- Calores Específicos Del Gas IdealDocumento1 páginaCalores Específicos Del Gas IdealAngel Arcadio CzAún no hay calificaciones
- ECOTECNOLOGÍASDocumento2 páginasECOTECNOLOGÍASAngel Arcadio CzAún no hay calificaciones
- Programa General Del Curso de CapacitaciónDocumento6 páginasPrograma General Del Curso de CapacitaciónAngel Arcadio CzAún no hay calificaciones
- Masa Molar, Ctte de Gas (Si)Documento1 páginaMasa Molar, Ctte de Gas (Si)Andres CasteloAún no hay calificaciones
- EXÁMEN ORDINARIO UNIDAD 2 FácilDocumento2 páginasEXÁMEN ORDINARIO UNIDAD 2 FácilAngel Arcadio CzAún no hay calificaciones
- AEF1038 Instrumentacion PDFDocumento11 páginasAEF1038 Instrumentacion PDFEliezerGonzálezAún no hay calificaciones
- EXÁMEN ORDINARIO UNIDAD 2 FácilDocumento2 páginasEXÁMEN ORDINARIO UNIDAD 2 FácilAngel Arcadio CzAún no hay calificaciones
- Exámen Ordinario Unidad 1 Grupo 1 DifícilDocumento2 páginasExámen Ordinario Unidad 1 Grupo 1 DifícilAngel Arcadio CzAún no hay calificaciones
- Estatuto Del CIPDocumento54 páginasEstatuto Del CIPLUIS MIGUEL LARICO CAMAAún no hay calificaciones
- Abro Silicona Gris 999 9-Ab 9-Ab42Documento1 páginaAbro Silicona Gris 999 9-Ab 9-Ab42Miguel Angel ContrerasAún no hay calificaciones
- Problemas Resueltos Sobre Gases IdealesDocumento6 páginasProblemas Resueltos Sobre Gases IdealesjulioAún no hay calificaciones
- Quark Análisis Dimensional y VectoresDocumento3 páginasQuark Análisis Dimensional y VectoresNaty FloresAún no hay calificaciones
- Arreglos y RecursividadDocumento4 páginasArreglos y Recursividadsandrasamco6230Aún no hay calificaciones
- Practica 01 PDFDocumento32 páginasPractica 01 PDFJinm BravoAún no hay calificaciones
- Esfuerzos de La EstructuraDocumento8 páginasEsfuerzos de La EstructuraadadadadAún no hay calificaciones
- Cementación espumosa simulada para pozos petrolerosDocumento15 páginasCementación espumosa simulada para pozos petrolerosCristhianAlvarezAún no hay calificaciones
- Examen Parcial II FISICADocumento5 páginasExamen Parcial II FISICACarlos Brandon Alvarado ZapataAún no hay calificaciones
- Meta4 ProgramadoresDocumento7 páginasMeta4 ProgramadoresAlberto SotoAún no hay calificaciones
- Controles ISO 27001-2014Documento12 páginasControles ISO 27001-2014RicardoAún no hay calificaciones
- Modelo de Un Centro de DistribucióndocxDocumento7 páginasModelo de Un Centro de DistribucióndocxIvan MoralesAún no hay calificaciones
- Soil Nailing-201612263Documento22 páginasSoil Nailing-201612263Erick Fernando ChanchavacAún no hay calificaciones
- Cañoneo de pozos: técnicas y métodosDocumento8 páginasCañoneo de pozos: técnicas y métodos1385221150% (2)
- Ecualizacion Dinamica ItlaDocumento3 páginasEcualizacion Dinamica ItlagarabitoAún no hay calificaciones
- Estequiometria de Una ReacciónDocumento7 páginasEstequiometria de Una ReacciónAna Cristina Pérez IsaacsAún no hay calificaciones
- Cuadro Comparativo - Construccion y Estructura Nautica - Javier PazDocumento7 páginasCuadro Comparativo - Construccion y Estructura Nautica - Javier PazDanilo Perez SilvaAún no hay calificaciones
- Ept2 U1 S1Documento8 páginasEpt2 U1 S1Elizabeth Gutierrez HuamaniAún no hay calificaciones
- Unidad 3 TroquelesDocumento3 páginasUnidad 3 TroquelesEduardo CuervoAún no hay calificaciones
- Estudio Del Talud Chua Alto Huaraz - AncashDocumento39 páginasEstudio Del Talud Chua Alto Huaraz - AncashNiker Yhon Justiniano InfantesAún no hay calificaciones
- Temas de ExposiciónDocumento2 páginasTemas de ExposiciónZein NiuAún no hay calificaciones
- 4 Semáforo Félix LarissaDocumento6 páginas4 Semáforo Félix LarissaLary GuzmanAún no hay calificaciones
- NTS 004 Manipulacion de EscalerasDocumento22 páginasNTS 004 Manipulacion de EscalerasdanielAún no hay calificaciones
- Tips de MecanicaDocumento7 páginasTips de Mecanicacrypsys100% (1)
- Practica 1 Toma de Coordenadas Con Un Receptor GPSDocumento20 páginasPractica 1 Toma de Coordenadas Con Un Receptor GPSJuanFelípeMoraAún no hay calificaciones