También podría gustarte
- Piloto Aviador ComercialDocumento9 páginasPiloto Aviador ComercialAdriel Alejandro Ríos Mariscal.Aún no hay calificaciones
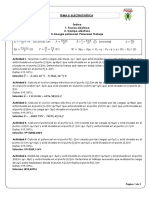
- Tema 5: Electrostática Índice 1. Fuerza Eléctrica 2. Campo Eléctrico 3. Energía Potencial. Potencial. TrabajoDocumento3 páginasTema 5: Electrostática Índice 1. Fuerza Eléctrica 2. Campo Eléctrico 3. Energía Potencial. Potencial. TrabajoAlma MarcelaAún no hay calificaciones
- Prope 4.6.en - EsDocumento6 páginasPrope 4.6.en - EsIngrydCamposAún no hay calificaciones
- TableDocumento1 páginaTablejosue moreno peñaAún no hay calificaciones
- Pueblos OriginariosDocumento4 páginasPueblos OriginariosFanny Labat BelleraAún no hay calificaciones
- Resumen Corpus Jean Luc NancyDocumento2 páginasResumen Corpus Jean Luc NancyPaloma Gomez SanchezAún no hay calificaciones
- 5.2 Niveles de Conciencia 5.3 Escala de GlasgowDocumento17 páginas5.2 Niveles de Conciencia 5.3 Escala de GlasgowRosa MartinezAún no hay calificaciones
- Caso Siemens ERPDocumento4 páginasCaso Siemens ERPHhhhCaliAún no hay calificaciones
- RX de Torax Interpretacion PDFDocumento8 páginasRX de Torax Interpretacion PDFKarim Alberto Vargas67% (3)
- 4 4 1 - Escultura RomanaDocumento14 páginas4 4 1 - Escultura Romanaapi-236785422Aún no hay calificaciones
- Tarea para El Segundo Parcial Sección PDocumento3 páginasTarea para El Segundo Parcial Sección PEduardo Velásquez0% (1)
- El Capital de Trabajo de Las Empresas de La Industria PDFDocumento12 páginasEl Capital de Trabajo de Las Empresas de La Industria PDFISSECJ 2019 2018-2019Aún no hay calificaciones
- Distribuciones MultidimensionalesDocumento45 páginasDistribuciones MultidimensionalesJoseLuisLópez0% (2)
- Hotelería-de-Sixto-Báez-PDF (1) - 183-269Documento87 páginasHotelería-de-Sixto-Báez-PDF (1) - 183-269ROBINSON CRUZAún no hay calificaciones
- Ficha Seguridad Clinker Nov. 2010Documento14 páginasFicha Seguridad Clinker Nov. 2010JuanPabloBernaschinaAún no hay calificaciones
- PL - Directorio Digital 1Documento49 páginasPL - Directorio Digital 1jSOTOAún no hay calificaciones
- INECUACIONESDocumento11 páginasINECUACIONESDiego JiménezAún no hay calificaciones
- Biología Recuperación 1 Trimestre (3 Tema)Documento17 páginasBiología Recuperación 1 Trimestre (3 Tema)Alejandro Cabrera RamirezAún no hay calificaciones
- Asentamientos Por Consolidacion Primaria-Part2-MonografíaDocumento10 páginasAsentamientos Por Consolidacion Primaria-Part2-MonografíaPatricia Belen GarciaAún no hay calificaciones
- Eucamiel 2019Documento12 páginasEucamiel 2019cristian patricio bazanAún no hay calificaciones
- Jürgen Golte (2001) Cultura, Racionalidad y Migracion Andina PDFDocumento280 páginasJürgen Golte (2001) Cultura, Racionalidad y Migracion Andina PDFMiguelMejiaTamarizAún no hay calificaciones
- Control S7 Gestión Logistica GCDocumento3 páginasControl S7 Gestión Logistica GCChris Bravo HuertaAún no hay calificaciones
- Ayudantía y Pauta 9.1Documento8 páginasAyudantía y Pauta 9.1Pablo GutierrezAún no hay calificaciones
- Cohen Martin - 101 Dilemas Eticos PDFDocumento465 páginasCohen Martin - 101 Dilemas Eticos PDFNicolas ignacioAún no hay calificaciones
- Manual de Prácticas de Química Orgánica IIIDocumento60 páginasManual de Prácticas de Química Orgánica IIIAthenas A.PAún no hay calificaciones
- Secado, Agentes Desecantes y TérminosDocumento18 páginasSecado, Agentes Desecantes y TérminosAldair MorenoAún no hay calificaciones
- Legalización de La MarihuanaDocumento13 páginasLegalización de La MarihuanavalAún no hay calificaciones
- Metodos de Explotacion Shrinkage StopingDocumento2 páginasMetodos de Explotacion Shrinkage StopingMathias SebastianAún no hay calificaciones
- 01 Reglamento para Transporte Con LocomotorasDocumento5 páginas01 Reglamento para Transporte Con Locomotorasrosel prudencio huamanAún no hay calificaciones
- Módulos Monocristalinos - Si-Esf-M-M125-36: Energía Solar FotovoltaicaDocumento6 páginasMódulos Monocristalinos - Si-Esf-M-M125-36: Energía Solar Fotovoltaicamanugp70Aún no hay calificaciones