También podría gustarte
- Explotación de las funcionalidades del sistema microinformático. IFCT0309De EverandExplotación de las funcionalidades del sistema microinformático. IFCT0309Aún no hay calificaciones
- Operaciones auxiliares con Tecnologías de la Información y la Comunicación. IFCT0108De EverandOperaciones auxiliares con Tecnologías de la Información y la Comunicación. IFCT0108Aún no hay calificaciones
- Desarrollo de componentes software para el manejo de dispositivos. IFCT0609De EverandDesarrollo de componentes software para el manejo de dispositivos. IFCT0609Aún no hay calificaciones
- Tema 9 Arquitectura de Computadoras, Portatiles y ServidoresDocumento88 páginasTema 9 Arquitectura de Computadoras, Portatiles y Servidoresfigueres100% (1)
- Administración Linux y Windows ServerDocumento79 páginasAdministración Linux y Windows ServerFranklin CxAún no hay calificaciones
- Tema 2 - TAIDocumento16 páginasTema 2 - TAIRaul RodriguezAún no hay calificaciones
- Unidad #1 Introducción Al Lenguaje EnsambladorDocumento5 páginasUnidad #1 Introducción Al Lenguaje EnsambladoringgafabifiAún no hay calificaciones
- C#capa DatosDocumento29 páginasC#capa DatosJoann QuinteroAún no hay calificaciones
- Configuracion 40 PreguntasDocumento4 páginasConfiguracion 40 PreguntasBRYAN VALOVI CABRERA VASQUEZ100% (1)
- Temario TAI BOP 213Documento4 páginasTemario TAI BOP 213enrique fernandez gimenezAún no hay calificaciones
- Bloque IVDocumento74 páginasBloque IVLuis Quintanilla RuiAún no hay calificaciones
- Actividad 6.2 JAIMEDocumento4 páginasActividad 6.2 JAIMEJaime MoyaAún no hay calificaciones
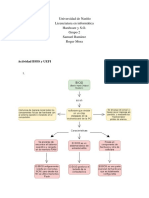
- BIOS y UEFIDocumento10 páginasBIOS y UEFIRoger MoraAún no hay calificaciones
- Arquitectura de OrdenadoresDocumento18 páginasArquitectura de Ordenadoresjuanchopro 00100% (1)
- Comparativa MBR GPTDocumento5 páginasComparativa MBR GPTJuan B. GarcíaAún no hay calificaciones
- UD 2. Integración de Elementos en Una Red, Fundamentos de RedesDocumento35 páginasUD 2. Integración de Elementos en Una Red, Fundamentos de RedesCarlos Aún no hay calificaciones
- Sistemas OperativosDocumento18 páginasSistemas OperativosLuis Alfredo SVAún no hay calificaciones
- U4 Sistemas OperativosDocumento8 páginasU4 Sistemas OperativosBenito DelgadoAún no hay calificaciones
- GESTIÓN MEMORIASDocumento13 páginasGESTIÓN MEMORIASMiguel BlancoAún no hay calificaciones
- Temas 67Documento18 páginasTemas 67Angel Luis Tovar PazAún no hay calificaciones
- 3 Servicio de Nombres de Dominio DNSDocumento50 páginas3 Servicio de Nombres de Dominio DNSEli SaulAún no hay calificaciones
- S.O., programas y conceptos informáticosDocumento5 páginasS.O., programas y conceptos informáticosIsaacRivasAún no hay calificaciones
- Clasificacion de Interfaces en MadDocumento12 páginasClasificacion de Interfaces en MadJorge López GómezAún no hay calificaciones
- Introduccion A Los S.O en Red (Windows)Documento26 páginasIntroduccion A Los S.O en Red (Windows)osgarsotoAún no hay calificaciones
- Escala Administrativa de INFORMATICADocumento3 páginasEscala Administrativa de INFORMATICAdanAún no hay calificaciones
- Discos DurosDocumento31 páginasDiscos DurosAdrian Clemente RomeroAún no hay calificaciones
- Test PDFDocumento7 páginasTest PDFMary Carmen Figueroa GuijarroAún no hay calificaciones
- UD 2. Instalación de Software de Utilidad y Propósito General para Un Sistema InformáticoDocumento28 páginasUD 2. Instalación de Software de Utilidad y Propósito General para Un Sistema InformáticoCarlos Aún no hay calificaciones
- Tema 9 - TAIDocumento23 páginasTema 9 - TAIRaul RodriguezAún no hay calificaciones
- Creacion de Scripts en LinuxDocumento32 páginasCreacion de Scripts en LinuxRoberto VenturaAún no hay calificaciones
- Apuntes de Administracion de Sistemas OperativosDocumento7 páginasApuntes de Administracion de Sistemas OperativosLuis LopezAún no hay calificaciones
- Componentes de Una ComputadoraDocumento11 páginasComponentes de Una ComputadoraMoises SantiagoAún no hay calificaciones
- ASIR SAD04 Contenidos 2016 VIDocumento33 páginasASIR SAD04 Contenidos 2016 VILuzbelAún no hay calificaciones
- Tema 2. Elementos Funcionales de Un Ordenador DigitalDocumento6 páginasTema 2. Elementos Funcionales de Un Ordenador DigitalkiringAún no hay calificaciones
- Configuración de Redes Workgroup WindowsDocumento9 páginasConfiguración de Redes Workgroup Windowschithijar100% (1)
- Modelo Cliente ServidorDocumento14 páginasModelo Cliente ServidorØsWälðø MärçänøAún no hay calificaciones
- Fundamentos de InformaticaDocumento57 páginasFundamentos de InformaticaRichard CruzAún no hay calificaciones
- Resumen Gestion de MemoriaDocumento17 páginasResumen Gestion de MemoriaAnghelita CaldheronAún no hay calificaciones
- Examen - LInuxNDGI - Parcial 2 PDFDocumento4 páginasExamen - LInuxNDGI - Parcial 2 PDFOscar Musayón VelásquezAún no hay calificaciones
- 2.6 WWW HTTP y HttpsDocumento4 páginas2.6 WWW HTTP y HttpsERIKA ASTRID BECERRA MERAZAún no hay calificaciones
- Conociendo Mi Dispositivo MovilDocumento8 páginasConociendo Mi Dispositivo MovilLuis AngelAún no hay calificaciones
- Conectores y Tipos de Cables de RedDocumento13 páginasConectores y Tipos de Cables de RedDionisio CovaAún no hay calificaciones
- (UML) y Patrones de DiseñoDocumento12 páginas(UML) y Patrones de Diseñocotesrodriguez.00Aún no hay calificaciones
- UD2 P04 Microprocesadores Alumnos PDFDocumento50 páginasUD2 P04 Microprocesadores Alumnos PDFpro100% (1)
- Test Redes 2 2012, SebasDocumento7 páginasTest Redes 2 2012, SebasSebastian de AraAún no hay calificaciones
- UF1 - 3. Permisos Básicos de Carpetas y Archivos en Windows (Pestañas Compartir y Seguridad) PDFDocumento3 páginasUF1 - 3. Permisos Básicos de Carpetas y Archivos en Windows (Pestañas Compartir y Seguridad) PDFraikaIIIAún no hay calificaciones
- UNIDAD 4 Redes InalambricasDocumento10 páginasUNIDAD 4 Redes InalambricasPedrosky MoralesAún no hay calificaciones
- TAI - Bloque III - AnexosDocumento78 páginasTAI - Bloque III - AnexosJosé Antonio FernándezAún no hay calificaciones
- Configuración básica de cluster HA con Corosync y PacemakerDocumento13 páginasConfiguración básica de cluster HA con Corosync y PacemakerluchoalcoAún no hay calificaciones
- Analisis de Componentes CpuDocumento16 páginasAnalisis de Componentes CpuJesús Melchor Hau NohAún no hay calificaciones
- Guia de Laboratorio 1Documento6 páginasGuia de Laboratorio 1toño ruisAún no hay calificaciones
- Partes Internas de Una PCDocumento15 páginasPartes Internas de Una PCMundo Vasquez100% (1)
- Taller de Sistemas Operativos 2Documento2 páginasTaller de Sistemas Operativos 2Juan Pablo GómezAún no hay calificaciones
- Tema 4 - LinuxDocumento18 páginasTema 4 - LinuxRaul RodriguezAún no hay calificaciones
- Apuntes Sistemas OperativosDocumento4 páginasApuntes Sistemas OperativosVíctor AndradeAún no hay calificaciones
- El Infierno de Las DLLDocumento10 páginasEl Infierno de Las DLLJhon Fernandez GarciaAún no hay calificaciones
- Acividades Dispositivos AlmacenamientoDocumento2 páginasAcividades Dispositivos AlmacenamientoFrancisco Manuel García VallejoAún no hay calificaciones
- Periféricos informática bloque II tema 2Documento7 páginasPeriféricos informática bloque II tema 2Cesar MfAún no hay calificaciones
- Generaciones UsbDocumento1 páginaGeneraciones UsbCesar MfAún no hay calificaciones
- B2 T2 Arbol de Conocimientos MinimosDocumento1 páginaB2 T2 Arbol de Conocimientos MinimosCesar MfAún no hay calificaciones
- 2 Como Funciona Una CPUDocumento5 páginas2 Como Funciona Una CPUCesar MfAún no hay calificaciones
- FichaINFBASICA REV0319Documento9 páginasFichaINFBASICA REV0319Cesar MfAún no hay calificaciones
- 3 Video Lecciones - 2 Arquitectura de La CPUDocumento6 páginas3 Video Lecciones - 2 Arquitectura de La CPUCesar MfAún no hay calificaciones
- 4 Video Lecciones - 3 MemoriasDocumento2 páginas4 Video Lecciones - 3 MemoriasCesar MfAún no hay calificaciones
- B2 T1 Árbol de Conocimientos MínimosDocumento1 páginaB2 T1 Árbol de Conocimientos MínimosCesar MfAún no hay calificaciones
- El Ordenador (Partes)Documento43 páginasEl Ordenador (Partes)Fernanda VargasAún no hay calificaciones
- Cabrera - Alexander - EnsayoDocumento2 páginasCabrera - Alexander - EnsayoAlexander CabreraAún no hay calificaciones
- Programacion - Horario - Pagos - Instituto Tec - 24 - 05 - 20Documento6 páginasProgramacion - Horario - Pagos - Instituto Tec - 24 - 05 - 20FERNANDO paredesAún no hay calificaciones
- Redes Industriales ModbusDocumento23 páginasRedes Industriales ModbusFranco venturaAún no hay calificaciones
- 1.3.4 Práctica de Laboratorio Visualizar A Los Hackers de Sombrero NegroDocumento3 páginas1.3.4 Práctica de Laboratorio Visualizar A Los Hackers de Sombrero NegroFrank GuzmanAún no hay calificaciones
- Programación Java ExamenDocumento5 páginasProgramación Java Examenelkin vegaAún no hay calificaciones
- Introduccion y Medidas de RendimientoDocumento14 páginasIntroduccion y Medidas de RendimientoJesús David Morán ValenciaAún no hay calificaciones
- Mapa conceptual sobre software, internet y sus serviciosDocumento3 páginasMapa conceptual sobre software, internet y sus serviciosMateo EchavarriaAún no hay calificaciones
- Ampli 1Documento2 páginasAmpli 1Visa ConsultingAún no hay calificaciones
- Yealink+SIP-T21P+E2+Datasheet ES (LA)Documento2 páginasYealink+SIP-T21P+E2+Datasheet ES (LA)RENZO ARTURO PORTILLA ARIASAún no hay calificaciones
- Ian SommervilleDocumento3 páginasIan SommervilleOzkr KnoAún no hay calificaciones
- Numeros BinariosDocumento20 páginasNumeros BinariosJulieta García Da RosaAún no hay calificaciones
- Desarrollo de Software vs Ingeniería de SoftwareDocumento8 páginasDesarrollo de Software vs Ingeniería de SoftwareBrayan MejiaAún no hay calificaciones
- Trabajo FinalDocumento12 páginasTrabajo FinalDonerys MeloAún no hay calificaciones
- Ejemplos de Los Diferentes Tipos de ComunicaciónDocumento3 páginasEjemplos de Los Diferentes Tipos de ComunicaciónABDIIEL HERNANDEZAún no hay calificaciones
- Taller de Router - GloriaDocumento5 páginasTaller de Router - GloriaGloria Arrieta DiazAún no hay calificaciones
- Proteccion de SoftwareDocumento20 páginasProteccion de SoftwareDevid IngenieriaAún no hay calificaciones
- U2 - NET AvanzadoDocumento17 páginasU2 - NET AvanzadoCripto TraderpyAún no hay calificaciones
- Transformación Digital - Mapa ConceptualDocumento1 páginaTransformación Digital - Mapa ConceptualLuis Ramos Flores33% (3)
- Símbolos y definiciones de diagramas de flujoDocumento1 páginaSímbolos y definiciones de diagramas de flujoYehilyn Garro Mora100% (1)
- Instalador y Administrador de Redes Informaticas - 0Documento47 páginasInstalador y Administrador de Redes Informaticas - 0Ferchu VeliAún no hay calificaciones
- Presentacion Webinar SEGURIDADDocumento24 páginasPresentacion Webinar SEGURIDADfranka99Aún no hay calificaciones
- Consulta 4 Delgado BurgosDocumento8 páginasConsulta 4 Delgado BurgosLeonardo DelgadoAún no hay calificaciones
- UploadedFile 129993131961603011Documento353 páginasUploadedFile 129993131961603011Maxus LordAún no hay calificaciones
- Arquitectura masiva y prueba de capítuloDocumento6 páginasArquitectura masiva y prueba de capítuloJosé Manuel Matehuala Avilés100% (2)
- Componentes de Un Diagrama de FlujoDocumento5 páginasComponentes de Un Diagrama de Flujoluis ichi .torresAún no hay calificaciones
- Dialnet Ciberseguridad 6115620Documento46 páginasDialnet Ciberseguridad 6115620NORMA RODRIGUEZAún no hay calificaciones
- Estructura de Llamada - PortaDocumento36 páginasEstructura de Llamada - PortaHugo HuamanAún no hay calificaciones
- Informe 09 2021Documento54 páginasInforme 09 2021Jhoel Cabello IzaguirreAún no hay calificaciones
- ODBC y ADO - NET - JDocumento17 páginasODBC y ADO - NET - JCarolina Cerón MéndezAún no hay calificaciones