También podría gustarte
- Sistema de Control Lógica CableadaDocumento42 páginasSistema de Control Lógica CableadaLeonardo BenitezAún no hay calificaciones
- WEG Reles Electronicos 50034664 Catalogo EspanolDocumento40 páginasWEG Reles Electronicos 50034664 Catalogo EspanolElias Nassif GomezAún no hay calificaciones
- Controles Eléctricos - Manual de Prácticas 2021Documento71 páginasControles Eléctricos - Manual de Prácticas 2021dali mojicaAún no hay calificaciones
- 3 Lectura e Interpretacion de Esquemas ElectricosDocumento30 páginas3 Lectura e Interpretacion de Esquemas ElectricosMariu LugoAún no hay calificaciones
- Logica CableadaDocumento37 páginasLogica Cableadanikoll1953100% (1)
- Laboratorio 04 Transmisores de TemperaturaDocumento26 páginasLaboratorio 04 Transmisores de TemperaturaMauro GerardoAún no hay calificaciones
- Pasos para El Cálculo de Una Instalación Eléctrica DomiciliariaDocumento26 páginasPasos para El Cálculo de Una Instalación Eléctrica DomiciliariaSergio AndradeAún no hay calificaciones
- Diagrama PsicrometricoDocumento118 páginasDiagrama PsicrometricoJose PaivaAún no hay calificaciones
- Protocolos de Pruebas de Tableros EléctricosDocumento236 páginasProtocolos de Pruebas de Tableros EléctricosRamiro Escobar IporreAún no hay calificaciones
- Contenido - Mantenimiento Preventivo y Verificacion de Tarjetas Electronicas Analogas y Digitales.Documento6 páginasContenido - Mantenimiento Preventivo y Verificacion de Tarjetas Electronicas Analogas y Digitales.Pifias MLSAún no hay calificaciones
- Electronica Industrial YAutomatizacion Cekit - Text Tomo 1Documento162 páginasElectronica Industrial YAutomatizacion Cekit - Text Tomo 1Miguel coronelAún no hay calificaciones
- WildiDocumento74 páginasWildiIsai ReyesAún no hay calificaciones
- Dtcxsl01es en FR Selector Smart LCDDocumento16 páginasDtcxsl01es en FR Selector Smart LCDYan marco MamaniAún no hay calificaciones
- Contactores TrifasicosDocumento10 páginasContactores TrifasicosGabriel TorresAún no hay calificaciones
- Automatismos Industriales - SensoresDocumento40 páginasAutomatismos Industriales - SensoresRonny Ramírez100% (1)
- Servicio Hornos MicroondasDocumento20 páginasServicio Hornos MicroondasNeida Moreno100% (1)
- Alternancia de BombasDocumento3 páginasAlternancia de BombasWilliams Ancco MendozaAún no hay calificaciones
- BAW MPR - 53 - 53S - A3918 EspañolDocumento17 páginasBAW MPR - 53 - 53S - A3918 EspañolAlejandro Martinat100% (1)
- Adiestramiento en Módulo Lógico de SiemensDocumento77 páginasAdiestramiento en Módulo Lógico de SiemensMili EspinozaAún no hay calificaciones
- Catalogo Resistencias LiquidosDocumento38 páginasCatalogo Resistencias LiquidosAlfredo Romero EchevarriaAún no hay calificaciones
- Caldera 2016 InformeDocumento13 páginasCaldera 2016 InformechristianAún no hay calificaciones
- Guia TallerDocumento122 páginasGuia TallerJason Fernández GarciaAún no hay calificaciones
- C5 5 - 4 PLC Control Continuo 2018-2Documento30 páginasC5 5 - 4 PLC Control Continuo 2018-2Alternador AlternadoAún no hay calificaciones
- 1-Tipos de Cargas y Demanda de Una InstalaciónDocumento11 páginas1-Tipos de Cargas y Demanda de Una InstalaciónLeandroAún no hay calificaciones
- Control y Distribucion Baja Tension SIEMDocumento260 páginasControl y Distribucion Baja Tension SIEMRamon Pujols P100% (1)
- Automatismos y Sistemas de Control. Unidad 2BDocumento55 páginasAutomatismos y Sistemas de Control. Unidad 2Bseleuco100% (2)
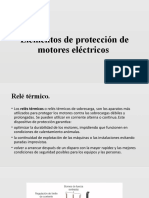
- Rele Termico y Guarda MotorDocumento7 páginasRele Termico y Guarda Motordharwin cruzAún no hay calificaciones
- Diagnostico de Automatismos ElectricosDocumento22 páginasDiagnostico de Automatismos ElectricosLUIS ICHAICOTO BONCANCAAún no hay calificaciones
- Cómo Leer Manómetros de RefrigeraciónDocumento5 páginasCómo Leer Manómetros de RefrigeraciónDomingo Gomez50% (2)
- Dispositivos y Tableros ElectricosDocumento65 páginasDispositivos y Tableros ElectricosMax Ryoga100% (1)
- Informe Controles BasicosDocumento7 páginasInforme Controles BasicosMilton ChoqueAún no hay calificaciones
- Logica CableadaDocumento19 páginasLogica CableadaEric Alex Chocano HernandezAún no hay calificaciones
- Sensores CapacitivosDocumento2 páginasSensores CapacitivosMaria Jose100% (1)
- Control de Maquinas Electricas PDFDocumento99 páginasControl de Maquinas Electricas PDFKarenJ.Flores100% (2)
- Calculos para MotoresDocumento12 páginasCalculos para Motoresnicolas bogadoAún no hay calificaciones
- Metodología para La Realización de Automatismo Con PLCDocumento14 páginasMetodología para La Realización de Automatismo Con PLCrafaoliveraAún no hay calificaciones
- Automatismos, Autómatas y Control IndustrialDocumento60 páginasAutomatismos, Autómatas y Control IndustrialPaul Jacome Freund100% (1)
- ClimatizaciónDocumento14 páginasClimatizaciónAndrey Pachón FrancoAún no hay calificaciones
- Apunte Instr - Med.mag - Electr.Documento22 páginasApunte Instr - Med.mag - Electr.Alez89Aún no hay calificaciones
- Resumen CADE SIMU 3Documento7 páginasResumen CADE SIMU 3Abel Jiménez RodríguezAún no hay calificaciones
- Catalogo Sica IndustrialDocumento24 páginasCatalogo Sica IndustrialmiguelarcienegaAún no hay calificaciones
- Amperimetros y Voltimetros PDFDocumento63 páginasAmperimetros y Voltimetros PDFRusmael Lagos PeraltaAún no hay calificaciones
- Examen 2do Parcial practico/Laboratorio/Control y Automatización IndustrialDocumento4 páginasExamen 2do Parcial practico/Laboratorio/Control y Automatización IndustrialAngel R. Mamani C.Aún no hay calificaciones
- Automatizmos CableadosDocumento25 páginasAutomatizmos CableadosjuanaAún no hay calificaciones
- VC 2Documento151 páginasVC 2eduardoAún no hay calificaciones
- Automatización Por Contactores 3 Marzo 2023Documento64 páginasAutomatización Por Contactores 3 Marzo 2023AndresLozadaAún no hay calificaciones
- Control Automatico de Procesos IndustrialesDocumento11 páginasControl Automatico de Procesos IndustrialesLeonardo Vence OrdoñezAún no hay calificaciones
- Automatismos EléctricosDocumento3 páginasAutomatismos EléctricosLenin Rafael Quilca ManriqueAún no hay calificaciones
- CX305 Manual ESDocumento20 páginasCX305 Manual ESCesar AnguloAún no hay calificaciones
- CIPer Model 50 Installation and Commissioning Instructions 2019 31-00233EFS - En.es PDFDocumento51 páginasCIPer Model 50 Installation and Commissioning Instructions 2019 31-00233EFS - En.es PDFMarcos Perez FriasAún no hay calificaciones
- Cartilla Básica Instalaciones EléctricasDocumento40 páginasCartilla Básica Instalaciones EléctricasMarco CarvajalAún no hay calificaciones
- Control PIDDocumento65 páginasControl PIDChristian OqAún no hay calificaciones
- Trabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoDocumento46 páginasTrabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoWalter Jesus100% (1)
- Practica No 3 de Cconversion de La EnergiaDocumento31 páginasPractica No 3 de Cconversion de La EnergiaJuan Carlos Figueroa VegaAún no hay calificaciones
- Capacitor de MarchaDocumento9 páginasCapacitor de MarchacheuqueleivaAún no hay calificaciones
- Instalaciones SCEDocumento12 páginasInstalaciones SCEAlejandro GonzalezAún no hay calificaciones
- ACS310 Variador ABBDocumento386 páginasACS310 Variador ABBAlejandro Rodriguez100% (1)
- Capitulo 3 Subestaciones EléctricaDocumento204 páginasCapitulo 3 Subestaciones Eléctricaivan montoya100% (1)
- Curso LOGICA CABLEADADocumento62 páginasCurso LOGICA CABLEADAAntolin soto sena100% (2)
- Informacion LOGICA CABLEADA PDFDocumento62 páginasInformacion LOGICA CABLEADA PDFJean Paul Soto VeraAún no hay calificaciones
- Microsoft Word - Temario CURSO SEGURIDAD ELÉCTRICA Modulo 2 Proteccion Contra Choques EléctricosDocumento4 páginasMicrosoft Word - Temario CURSO SEGURIDAD ELÉCTRICA Modulo 2 Proteccion Contra Choques EléctricosGuillermo FurnariAún no hay calificaciones
- Actividad 1 AlgoritmosDocumento4 páginasActividad 1 Algoritmosdario basualdoAún no hay calificaciones
- Ministerio de Economia Secretaria de Estado de Obras Y Servicios Publicos Listado de ItemsDocumento21 páginasMinisterio de Economia Secretaria de Estado de Obras Y Servicios Publicos Listado de Itemsdario basualdoAún no hay calificaciones
- Actividad 2 Algoritmos ComputacionalesDocumento5 páginasActividad 2 Algoritmos Computacionalesdario basualdoAún no hay calificaciones
- ManualDocumento83 páginasManualCristina Miguélez100% (1)
- Circuitos Electricos Ejercicios ResueltoDocumento8 páginasCircuitos Electricos Ejercicios ResueltoMirla CrespoAún no hay calificaciones
- FP Instalaciones ElectrotecnicasDocumento8 páginasFP Instalaciones ElectrotecnicasAntonio LucenaAún no hay calificaciones
- Temario Curso Electricidad DomiciliariaDocumento4 páginasTemario Curso Electricidad Domiciliariadario basualdoAún no hay calificaciones
- 28 Enoro de 2022.-: Qfa Jwjnlin"Documento1 página28 Enoro de 2022.-: Qfa Jwjnlin"dario basualdoAún no hay calificaciones
- ESTRUCTURADocumento1 páginaESTRUCTURAdario basualdoAún no hay calificaciones
- Planilla de CarpinteriaDocumento1 páginaPlanilla de Carpinteriadario basualdoAún no hay calificaciones
- Iluminacion 2Documento1 páginaIluminacion 2dario basualdoAún no hay calificaciones
- Memoria Descriptiva: Yerba Buena Febrero 2022Documento3 páginasMemoria Descriptiva: Yerba Buena Febrero 2022dario basualdoAún no hay calificaciones
- DPG 0212a Documentación PL - ElectricosDocumento111 páginasDPG 0212a Documentación PL - Electricosdario basualdoAún no hay calificaciones
- Circuitos R L C SerieDocumento11 páginasCircuitos R L C SerieTécnico ElectrónicaAún no hay calificaciones
- Correccion Del Factor de PotenciaDocumento27 páginasCorreccion Del Factor de Potenciadario basualdoAún no hay calificaciones
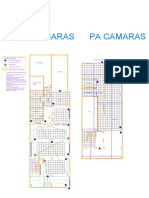
- Camaras 2Documento1 páginaCamaras 2dario basualdoAún no hay calificaciones
- Factibilidad de CargaDocumento1 páginaFactibilidad de Cargadario basualdoAún no hay calificaciones
- Memo Aula N.I.Documento1 páginaMemo Aula N.I.dario basualdoAún no hay calificaciones
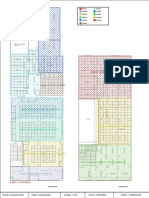
- Carestino - Tucuman - SectorizacionDocumento1 páginaCarestino - Tucuman - Sectorizaciondario basualdoAún no hay calificaciones
- ComoEnfrentarProblemasDificiles GuíaDocumento34 páginasComoEnfrentarProblemasDificiles Guíadario basualdoAún no hay calificaciones
- Alarma 2Documento1 páginaAlarma 2dario basualdoAún no hay calificaciones
- Sensores 2Documento1 páginaSensores 2dario basualdoAún no hay calificaciones
- Esc 354Documento36 páginasEsc 354dario basualdoAún no hay calificaciones
- Memoria Baño DiscapacitadoDocumento1 páginaMemoria Baño Discapacitadodario basualdoAún no hay calificaciones
- Remod - Sanitarios DamasDocumento1 páginaRemod - Sanitarios Damasdario basualdoAún no hay calificaciones
- Listado Esc 110Documento1 páginaListado Esc 110dario basualdoAún no hay calificaciones
- RemediosDocumento6 páginasRemediosdario basualdoAún no hay calificaciones
- Incidencias Luces Emerg. - (8 Bocas)Documento1 páginaIncidencias Luces Emerg. - (8 Bocas)dario basualdoAún no hay calificaciones
- Presupuesto Modulo Descap.Documento2 páginasPresupuesto Modulo Descap.dario basualdoAún no hay calificaciones
- Maquinas ElectricasDocumento12 páginasMaquinas ElectricasAngelica GuijarroAún no hay calificaciones
- Características de Las Radiaciones LuminosasDocumento3 páginasCaracterísticas de Las Radiaciones LuminosasgrediAún no hay calificaciones
- ELECTRICIDAD AUTOMOTRIZ - Como Instalar Un Rele Universal de 5 PatasDocumento11 páginasELECTRICIDAD AUTOMOTRIZ - Como Instalar Un Rele Universal de 5 Patasteroplas50% (2)
- Usos de Circutos de Primer Orden en La Vida CotidianaDocumento3 páginasUsos de Circutos de Primer Orden en La Vida CotidianaJorge Peña TorresAún no hay calificaciones
- PC2 - 2020 - 2 - Parte 1Documento1 páginaPC2 - 2020 - 2 - Parte 1Okay?Aún no hay calificaciones
- Taller CapacitanciaDocumento2 páginasTaller Capacitanciahary lealAún no hay calificaciones
- ANALISIS INSTRUMENTAL PRIMERA UNIDAD - (Semana 1-7 NumeradoDocumento66 páginasANALISIS INSTRUMENTAL PRIMERA UNIDAD - (Semana 1-7 NumeradoCesar Arpasi ChuraAún no hay calificaciones
- 3.-Material para Imprimir ESP.7 Al 11 Sept Esp.Documento7 páginas3.-Material para Imprimir ESP.7 Al 11 Sept Esp.Laura Daniela Leija Avalos100% (1)
- Estructura Atomica 2019 PDFDocumento104 páginasEstructura Atomica 2019 PDFSeba MolinaAún no hay calificaciones
- Pratica de Ley de OhmDocumento4 páginasPratica de Ley de OhmArminda Lopez CalichoAún no hay calificaciones
- Experimento 3Documento3 páginasExperimento 3Jeyson CalderonAún no hay calificaciones
- Acoplamiento MagnéticoDocumento35 páginasAcoplamiento MagnéticoAlexander SuárezAún no hay calificaciones
- Examen SolucionDocumento5 páginasExamen SolucionYahir OstosAún no hay calificaciones
- Practica 01Documento19 páginasPractica 01TGAAún no hay calificaciones
- 1.33 - 1.51Documento4 páginas1.33 - 1.51Jesus Alejandro Salas SanchezAún no hay calificaciones
- Preinforme 2 - Laboratorio Química InstrumentalDocumento8 páginasPreinforme 2 - Laboratorio Química InstrumentalLydia Montoya HernandezAún no hay calificaciones
- R4 Lcei Salgado JocelyneDocumento9 páginasR4 Lcei Salgado JocelyneHomeroOjedaAún no hay calificaciones
- 2021 Tri 3 TALLER 1Documento2 páginas2021 Tri 3 TALLER 1Guille Diaz MardonesAún no hay calificaciones
- TP 4Documento4 páginasTP 4Leon ArdoAún no hay calificaciones
- Sistemas Bifasico y TrifasicosDocumento21 páginasSistemas Bifasico y TrifasicosJanan FloresAún no hay calificaciones
- Laboratorio 2 Mantto - PredictivoDocumento27 páginasLaboratorio 2 Mantto - PredictivoVictor TumbajulcaAún no hay calificaciones
- Ejercicio 12 de Aplicación de Ecuaciones Diferenciales de Primer OrdenDocumento3 páginasEjercicio 12 de Aplicación de Ecuaciones Diferenciales de Primer Ordenhildelbrando correasalcedoAún no hay calificaciones
- Principio de Funcionamiento de Las Maquinas ElectricasDocumento17 páginasPrincipio de Funcionamiento de Las Maquinas ElectricasMaycol JavierAún no hay calificaciones
- 25 Motores 2Documento31 páginas25 Motores 2panthom2064Aún no hay calificaciones
- Primer Parcial ElectromagnetismoDocumento5 páginasPrimer Parcial ElectromagnetismoRicardo Alfonso Perez CervantesAún no hay calificaciones
- Principios Del ElectromagnetismoDocumento6 páginasPrincipios Del ElectromagnetismoJhoan CamachoAún no hay calificaciones
- Catalogo - WEG Correcion Del Factor de PotenciaDocumento64 páginasCatalogo - WEG Correcion Del Factor de PotenciamtotaitiveAún no hay calificaciones
- Trabajo Práctico 2 - Efecto FotoeléctricoDocumento7 páginasTrabajo Práctico 2 - Efecto FotoeléctricoJuan Pablo SustersicAún no hay calificaciones
- El Átomo y Los Modelos Atómicos CNEA (1) LecturaDocumento11 páginasEl Átomo y Los Modelos Atómicos CNEA (1) LecturaMateo ArceAún no hay calificaciones
- Taller Grupal 2 Fisica II IUE 2020-2Documento1 páginaTaller Grupal 2 Fisica II IUE 2020-2DanielAún no hay calificaciones