También podría gustarte
- Electronica IndustrialDocumento1046 páginasElectronica Industrialcomasgif86% (7)
- Capacitacion de Riesgo ElectricoDocumento42 páginasCapacitacion de Riesgo ElectricoFrancisco Javier Perez MartinezAún no hay calificaciones
- Problemas Cap 2 ADocumento35 páginasProblemas Cap 2 AArleth Ticona100% (1)
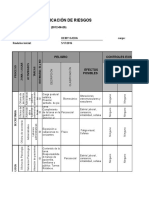
- Evidencia 2 (De Producto) RAP2 - EV02 - Matriz para Identificación de Peligros, Valoración de Riesgos y Determinación de ControlesDocumento45 páginasEvidencia 2 (De Producto) RAP2 - EV02 - Matriz para Identificación de Peligros, Valoración de Riesgos y Determinación de ControlesDeiby Ojeda84% (293)
- Ecuaciones Diferenciales Solucionario Ecuaciones Diferenciales Ing ZuritaDocumento149 páginasEcuaciones Diferenciales Solucionario Ecuaciones Diferenciales Ing ZuritaColin Jackson100% (1)
- 1,2,3Documento7 páginas1,2,3Edwin Daniel Navarro ValenzuelaAún no hay calificaciones
- 8Documento13 páginas8IVAN FELIPE ERAZO CERON100% (2)
- Capitulos 2 - Fem - V12Documento30 páginasCapitulos 2 - Fem - V12Gonzalo Alcazar100% (1)
- Tensiones y DeformacionesDocumento13 páginasTensiones y DeformacionesPamela Deisy Polin ReyesAún no hay calificaciones
- Ecuaciones de Navier StokesDocumento10 páginasEcuaciones de Navier StokesSebastián TorresAún no hay calificaciones
- A 2Documento13 páginasA 2ivan felipe erazo ceronAún no hay calificaciones
- Examen Sustitutorio ED 27-06-2019 SOLUCIONARIODocumento8 páginasExamen Sustitutorio ED 27-06-2019 SOLUCIONARIOArnold Jhony Jara EstebanAún no hay calificaciones
- Ejercicios Miscelaneos Cap. 1Documento1 páginaEjercicios Miscelaneos Cap. 1fffgAún no hay calificaciones
- Me33a Cap07Documento11 páginasMe33a Cap07efcarrionAún no hay calificaciones
- Practica 5Documento2 páginasPractica 5Gorge CallejosAún no hay calificaciones
- 3-Estado Deformacional2017Documento12 páginas3-Estado Deformacional2017Fabio Hereñu OzzyAún no hay calificaciones
- Calculo II - TP - Apendice II - 2020Documento7 páginasCalculo II - TP - Apendice II - 2020Lucas MatíasAún no hay calificaciones
- Tabla Derivadas e IntegralesDocumento3 páginasTabla Derivadas e Integralesduvan alexander usma rendonAún no hay calificaciones
- Solucionario Ecuaciones Diferenciales Ing ZuritaDocumento202 páginasSolucionario Ecuaciones Diferenciales Ing ZuritaDaniel Rodriguez SerrudoAún no hay calificaciones
- Formulas Globalizador ResistenciaDocumento9 páginasFormulas Globalizador ResistenciaFrancisco NavarroAún no hay calificaciones
- Examen para La Practica Del Segundo ParcialDocumento1 páginaExamen para La Practica Del Segundo ParcialJhoao Flores CoriñaupaAún no hay calificaciones
- 9-Ecuaciones Diferenciales de Energía PDFDocumento46 páginas9-Ecuaciones Diferenciales de Energía PDFValeria SosaAún no hay calificaciones
- Ejercicios - Ecuaciones ExactasDocumento1 páginaEjercicios - Ecuaciones ExactasIrma NeyraAún no hay calificaciones
- Estados de Tensión y Deformación (Estabilidad II 64.12)Documento34 páginasEstados de Tensión y Deformación (Estabilidad II 64.12)MonicaChRzAún no hay calificaciones
- Formulario Calculo IDocumento2 páginasFormulario Calculo INatalia LopezAún no hay calificaciones
- Unidad #2 - Guia #3-Integrales Triples-Cal III - UPBDocumento34 páginasUnidad #2 - Guia #3-Integrales Triples-Cal III - UPBDayana Suarez RamosAún no hay calificaciones
- Trasformacion de Esfuerzos PDFDocumento15 páginasTrasformacion de Esfuerzos PDFFrank MedranoAún no hay calificaciones
- Tensiones PDFDocumento18 páginasTensiones PDFMicael UrbanAún no hay calificaciones
- VERDESDocumento27 páginasVERDESMAYCOL ISAAC QUISPE QUISPEAún no hay calificaciones
- FormulasDocumento1 páginaFormulasMazhar IqbalAún no hay calificaciones
- Estado Plano de EsfuerzosDocumento18 páginasEstado Plano de EsfuerzosJose Luis Soria RamirezAún no hay calificaciones
- MAT-119-T Clase 23 Identidades Trigonométricas - ASIGNACIONDocumento3 páginasMAT-119-T Clase 23 Identidades Trigonométricas - ASIGNACIONEdemil EchavarriaAún no hay calificaciones
- Problemas Modelos de La Guia 4 PDFDocumento8 páginasProblemas Modelos de La Guia 4 PDFCarlo OsorioAún no hay calificaciones
- Ecuaciones Diferenciales y SistemasDocumento5 páginasEcuaciones Diferenciales y SistemasJunior Aldair Hidalgo LazoAún no hay calificaciones
- Practica Nº1 Calculo IIIDocumento4 páginasPractica Nº1 Calculo IIIRonaldo CoriAún no hay calificaciones
- Momentos y Centros de MasaDocumento6 páginasMomentos y Centros de MasaYuliana ArenasAún no hay calificaciones
- Trabajo Practico III (Am II-2018-Bianco) - ANÁLISIS MATEMÁTICO 2 (UBA FCE)Documento10 páginasTrabajo Practico III (Am II-2018-Bianco) - ANÁLISIS MATEMÁTICO 2 (UBA FCE)John DoeAún no hay calificaciones
- Calculo de Tensiones PrincipalesDocumento28 páginasCalculo de Tensiones PrincipalesJose MenaAún no hay calificaciones
- 10 - Tensión y Deformación Plana - Semana 4 - Sesión 7 y 8 - 26.05.2020 Al 28.05.2020Documento34 páginas10 - Tensión y Deformación Plana - Semana 4 - Sesión 7 y 8 - 26.05.2020 Al 28.05.2020Eric ManuelAún no hay calificaciones
- Cap 11 Circulo de Mohr en Dos Dimensiones - Prof. Alberto MonsalveDocumento6 páginasCap 11 Circulo de Mohr en Dos Dimensiones - Prof. Alberto MonsalveBastian ParedesAún no hay calificaciones
- Material S14Documento8 páginasMaterial S14Patricia PomaAún no hay calificaciones
- Ejer Cici OsDocumento7 páginasEjer Cici Osedgar custodioAún no hay calificaciones
- 12cap3 CinematicadeFluidosEjerciciosResueltosDocumento13 páginas12cap3 CinematicadeFluidosEjerciciosResueltosAlvaro TorrezAún no hay calificaciones
- Estado Biaxial de EsfuerzosDocumento28 páginasEstado Biaxial de EsfuerzosRonaldo Enriquez CapchaAún no hay calificaciones
- H.P Semana 13-Calculo 2-2019 1Documento2 páginasH.P Semana 13-Calculo 2-2019 1Mirian Torres PoloAún no hay calificaciones
- Tema2 Orden Uno Resueltos PDFDocumento7 páginasTema2 Orden Uno Resueltos PDFSilvia Verónica Varillas FioriAún no hay calificaciones
- EjerciciosDocumento7 páginasEjerciciosRuben ValeraAún no hay calificaciones
- UntitledDocumento6 páginasUntitledNathalie Alejandra Valenzuela CachicasAún no hay calificaciones
- 1025Documento2 páginas1025Juan Manuel EsquecheAún no hay calificaciones
- Solución Derivada ImplicitaDocumento8 páginasSolución Derivada ImplicitaSergioRodriguezAún no hay calificaciones
- 6 Integrales TriplesDocumento21 páginas6 Integrales TriplesSpeetean Ferrari100% (1)
- Taller2 VerificaciónIdentidadesTrigonométricas PDFDocumento2 páginasTaller2 VerificaciónIdentidadesTrigonométricas PDFmaria jose Rodríguez arandaAún no hay calificaciones
- 01-Analisis de Esfuerzos-Parte 1Documento25 páginas01-Analisis de Esfuerzos-Parte 1JHONATAN ALEXANDER ROSALES PORTILLAAún no hay calificaciones
- Soluciones Ecuaciones ExactasDocumento8 páginasSoluciones Ecuaciones Exactasleo assAún no hay calificaciones
- Hoja de Identidades y FormulasDocumento2 páginasHoja de Identidades y FormulasAlan CortezAún no hay calificaciones
- Formulario PDFDocumento12 páginasFormulario PDFJ Deyvid FloresAún no hay calificaciones
- Fuerzas Superficiales, Por Unidad de VolumenDocumento4 páginasFuerzas Superficiales, Por Unidad de VolumenAgustín BrusaAún no hay calificaciones
- Teoría de IntegraciónDocumento24 páginasTeoría de IntegraciónAndrés Ricardo Aldana SaavedraAún no hay calificaciones
- Pauta Solemne 1Documento3 páginasPauta Solemne 1Jonathan Esteban AliagaTroncosoAún no hay calificaciones
- Ejercicios de IntegralesDocumento11 páginasEjercicios de IntegralesJoel Alayo OntonAún no hay calificaciones
- 5. Đề cương 11 1. Đạo hàm 2 HSLG HS hsDocumento12 páginas5. Đề cương 11 1. Đạo hàm 2 HSLG HS hsMạc NamAún no hay calificaciones
- Material Complementario. Clase-3Documento5 páginasMaterial Complementario. Clase-3Jeimy del Carmen Roa LópezAún no hay calificaciones
- Informe 8 de Laboratorio de Física MecanicaDocumento4 páginasInforme 8 de Laboratorio de Física Mecanicatatiana tamayoAún no hay calificaciones
- Informe 1-FiemDocumento8 páginasInforme 1-FiemArius Master 2572Aún no hay calificaciones
- Joseph John ThomsonDocumento10 páginasJoseph John ThomsonHesperius TexcatlipocaAún no hay calificaciones
- 06 Cap - IvDocumento60 páginas06 Cap - IvSergio David Pardo GuerreroAún no hay calificaciones
- 04 Especificación Técnica Instalaciones EléctricasDocumento38 páginas04 Especificación Técnica Instalaciones EléctricasRobinson Franklin Villegas RomanAún no hay calificaciones
- UNIDAD 3 Miembros Sujetos A CompresionDocumento16 páginasUNIDAD 3 Miembros Sujetos A CompresionarlexpucAún no hay calificaciones
- UN PASEO QUE ECHÓ A PERDER UNA BELLA TEORÍA Capitulo VIIIDocumento2 páginasUN PASEO QUE ECHÓ A PERDER UNA BELLA TEORÍA Capitulo VIIIgrupocamelotciencias75% (4)
- Triptico y Llegó La LuzDocumento2 páginasTriptico y Llegó La LuzAngela RamosAún no hay calificaciones
- TXTTDocumento3 páginasTXTTLuz DaryAún no hay calificaciones
- Guia N2 Anual Semana 5 - Equivalente Mecanico de Calor OkDocumento3 páginasGuia N2 Anual Semana 5 - Equivalente Mecanico de Calor Oksamira diazAún no hay calificaciones
- Conducción de Calor en Estado EstacionarioDocumento16 páginasConducción de Calor en Estado EstacionarioAngel FariaAún no hay calificaciones
- Principios de Inventiva - AmetrizDocumento9 páginasPrincipios de Inventiva - AmetrizERIC SALGADOAún no hay calificaciones
- Élie Cartan - Wikipedia, La Enciclopedia LibreDocumento3 páginasÉlie Cartan - Wikipedia, La Enciclopedia LibreFreddy RodriguezAún no hay calificaciones
- Justificacion Maxima Demanda - 13 - 10 - 19Documento4 páginasJustificacion Maxima Demanda - 13 - 10 - 19Luis KokyAún no hay calificaciones
- Informe Sintesis Del Acetato de Isoamilo 26032021Documento5 páginasInforme Sintesis Del Acetato de Isoamilo 26032021ela7cu-614774Aún no hay calificaciones
- DTC Kia - GasolinaDocumento9 páginasDTC Kia - GasolinaJOn saldañaAún no hay calificaciones
- Practica 2 Lab SensoresDocumento10 páginasPractica 2 Lab SensoresIsaac CanoAún no hay calificaciones
- E Utb Fafi Electricidad 000003Documento25 páginasE Utb Fafi Electricidad 000003fernando romero sotoAún no hay calificaciones
- Trabajo Colaborativo de Algebra Lineal Cipa 1Documento29 páginasTrabajo Colaborativo de Algebra Lineal Cipa 1MAYCOL JAVIER GARCIA PACHECO ESTUDIANTE ACTIVOAún no hay calificaciones
- Efecto DopplerDocumento9 páginasEfecto DopplerLuisa Rincon DiazAún no hay calificaciones
- Formato Analisis Equipo de Proteccion PersonalDocumento4 páginasFormato Analisis Equipo de Proteccion PersonalCarolina TiradoAún no hay calificaciones
- Tesina - Vasquez Cortez Rodolfo Delfin PDFDocumento82 páginasTesina - Vasquez Cortez Rodolfo Delfin PDFCarlos sanchezAún no hay calificaciones
- Nomenclatura Inorganica 2024Documento18 páginasNomenclatura Inorganica 2024alexandroorozco602Aún no hay calificaciones
- Clasificacion de RamalesDocumento5 páginasClasificacion de RamalesYamil FloresAún no hay calificaciones
- Taller Quimica de Analitica - Espectroscopia de AbsorcionDocumento14 páginasTaller Quimica de Analitica - Espectroscopia de AbsorcionNachoSebastiánMiranda100% (4)
- Geométria Semana 01Documento7 páginasGeométria Semana 01Michael BarrantesAún no hay calificaciones
- Taller 1 - Convertidor de ParDocumento11 páginasTaller 1 - Convertidor de ParJonathan Smith Santos RiveraAún no hay calificaciones