También podría gustarte
- 22 AZ-303-EspañolDocumento552 páginas22 AZ-303-EspañolRoberto Tébar EspuigAún no hay calificaciones
- Plantilla Actividad 2 UNIDAD 3 CFC PPLT (14) 2Documento18 páginasPlantilla Actividad 2 UNIDAD 3 CFC PPLT (14) 2weweAún no hay calificaciones
- Interfazado General Del Computador (Sistema Mínimo)Documento21 páginasInterfazado General Del Computador (Sistema Mínimo)Luis PerezAún no hay calificaciones
- Valery Sovero - Tarea #1 PPDocumento4 páginasValery Sovero - Tarea #1 PPValery SoveroAún no hay calificaciones
- Lab4 G7Documento19 páginasLab4 G7Jhojan Mamani100% (1)
- Tarea Semana 2Documento4 páginasTarea Semana 2Uriel Gamez AlejaldreAún no hay calificaciones
- Unidades de Medición en TelecomunicacionesDocumento46 páginasUnidades de Medición en TelecomunicacionesLuis GomezAún no hay calificaciones
- Elementos Del PseudocodigoDocumento6 páginasElementos Del PseudocodigoMarielos Bautista25% (4)
- Proyecto Final Secuencia 3 SemaforosDocumento16 páginasProyecto Final Secuencia 3 SemaforosMichel ESAún no hay calificaciones
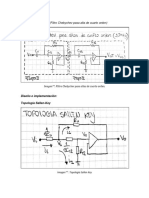
- Filtro ChebyshevDocumento13 páginasFiltro ChebyshevJavier HurtadoAún no hay calificaciones
- Sistemas Operativos - MemoriaDocumento64 páginasSistemas Operativos - MemoriaProf Matias GarciaAún no hay calificaciones
- Informe de RadioDocumento12 páginasInforme de RadioOrlandoAlberCcamaAlvarezAún no hay calificaciones
- Practica Contador 7490Documento7 páginasPractica Contador 7490Arnoldo ZereceroAún no hay calificaciones
- Informe de Laboratorio 3 MicroprocesadoresDocumento8 páginasInforme de Laboratorio 3 MicroprocesadoresLuis Miguel SequeliAún no hay calificaciones
- Preguntas de LaboDocumento2 páginasPreguntas de Laboivan silvaAún no hay calificaciones
- 633 TP 21-2Documento10 páginas633 TP 21-2J A M SAún no hay calificaciones
- Informe de Un Restador en PROTOBOARDDocumento10 páginasInforme de Un Restador en PROTOBOARDIvan Crispin PaucarAún no hay calificaciones
- Práctica 11 - OsciladoresDocumento13 páginasPráctica 11 - Osciladoresdiegofer90100100% (1)
- Laboratorio Calculadora BinariaDocumento7 páginasLaboratorio Calculadora BinariaNicolas OtavoAún no hay calificaciones
- Acoplamiento de ContadoresDocumento9 páginasAcoplamiento de ContadoresAnonymous jv3i8NAAún no hay calificaciones
- LaboratorioDocumento4 páginasLaboratorioRamiroAún no hay calificaciones
- Informe Puente HDocumento6 páginasInforme Puente HJair JoyaAún no hay calificaciones
- Reporte Practica1Documento9 páginasReporte Practica1roman bedollaAún no hay calificaciones
- Minisumo 10x10Documento1 páginaMinisumo 10x10Leo AguileraAún no hay calificaciones
- En CuestaDocumento2 páginasEn CuestaStefany Añazco TavaraAún no hay calificaciones
- Informe DadoDocumento8 páginasInforme DadoPaul Romero Riera100% (1)
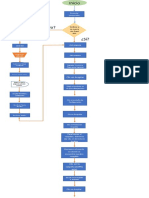
- Flujograma de Restauración de Respaldo de Base de Datos de Una USBDocumento3 páginasFlujograma de Restauración de Respaldo de Base de Datos de Una USBJazmín jsk100% (1)
- Practica 6Documento3 páginasPractica 6Sangu Sumerio Solis CAún no hay calificaciones
- Floyd - Principios de Circuitos Electricos, 2007, 8a EdDocumento5 páginasFloyd - Principios de Circuitos Electricos, 2007, 8a EdIng Castillo SanchezAún no hay calificaciones
- Comparador Analógico Pic16f887Documento1 páginaComparador Analógico Pic16f887Brandon BarriosAún no hay calificaciones
- Practico Practica P 1 SecDisplay PulsantesDocumento8 páginasPractico Practica P 1 SecDisplay PulsantesAndres UrgilezAún no hay calificaciones
- 1-Conceptos Basicos de OODocumento92 páginas1-Conceptos Basicos de OOWilkin Orlando Duran BelloAún no hay calificaciones
- Examen 5Documento33 páginasExamen 5nestor huapayaAún no hay calificaciones
- Configuracion Air RouterDocumento11 páginasConfiguracion Air RouterstevenAún no hay calificaciones
- Practica de TransformadoresDocumento10 páginasPractica de TransformadoresJuan David Torres RodriguezAún no hay calificaciones
- DimmerDocumento6 páginasDimmerAngsusParrizAún no hay calificaciones
- Plan de CuentasDocumento6 páginasPlan de CuentasRuben ChavezAún no hay calificaciones
- Clase 6. ADC y MemoriaDocumento13 páginasClase 6. ADC y MemoriaSergio GuerreroAún no hay calificaciones
- Contador Digital 7490Documento6 páginasContador Digital 7490Frank RomeroAún no hay calificaciones
- Practica AWRDocumento11 páginasPractica AWRCARLOS EDUARDO JOVEN GARCIAAún no hay calificaciones
- 20101sfiec002993 1 PDFDocumento3 páginas20101sfiec002993 1 PDFHomeroOjedaAún no hay calificaciones
- Matemáticas II - Regla Producto y Cociente - Adm. Empresas PDFDocumento12 páginasMatemáticas II - Regla Producto y Cociente - Adm. Empresas PDFYesid MartinezAún no hay calificaciones
- Informe Registro y Contador de 8 Bits Con Flip Flops PDFDocumento4 páginasInforme Registro y Contador de 8 Bits Con Flip Flops PDFarnoldtorresninoAún no hay calificaciones
- Elevador KJKDocumento23 páginasElevador KJKKarenAún no hay calificaciones
- Practica-Convertidores ADC y DAC - I UNIDADDocumento8 páginasPractica-Convertidores ADC y DAC - I UNIDADBryanMendezReynosoAún no hay calificaciones
- Lab2580 6 12019 PDFDocumento3 páginasLab2580 6 12019 PDFMichael pabloAún no hay calificaciones
- Control de LCD en BASICDocumento6 páginasControl de LCD en BASICPollo de la Sexta100% (1)
- Pic Servomotor AssemblerDocumento4 páginasPic Servomotor AssemblerAbraham SAROAún no hay calificaciones
- Solucion Actividad 5 Contabilidad FinancieraDocumento24 páginasSolucion Actividad 5 Contabilidad FinancieraJaime Cruz100% (1)
- Trabajo Flip-Flops Electronica DigitalDocumento17 páginasTrabajo Flip-Flops Electronica DigitalVictor AlfonsoAún no hay calificaciones
- Lógica Binaria CAPITULO II Circuitos LogicosDocumento13 páginasLógica Binaria CAPITULO II Circuitos Logicosangel-allan-x-8458100% (1)
- Informe Compuertas UniversalesDocumento5 páginasInforme Compuertas UniversalesInnova CortinasAún no hay calificaciones
- Diseño e Implementación de Un Multiplicador IterativoDocumento9 páginasDiseño e Implementación de Un Multiplicador IterativoMarco TorresAún no hay calificaciones
- Codigo en MicrocodeDocumento3 páginasCodigo en MicrocodeAngelo AlquingaAún no hay calificaciones
- ACE1 Cap3 MetodosGenerales PDFDocumento25 páginasACE1 Cap3 MetodosGenerales PDFOliver Alexander Tunix PeraltaAún no hay calificaciones
- Método de La Falsa PosiciónDocumento5 páginasMétodo de La Falsa PosiciónBryan Roy Cordova GomezAún no hay calificaciones
- PRACTICA 1 LaboratorioDigitalDocumento23 páginasPRACTICA 1 LaboratorioDigitalRonald Molina FariasAún no hay calificaciones
- Informe Laboratorio Ele Digital 5 Sumador Restador F2Documento5 páginasInforme Laboratorio Ele Digital 5 Sumador Restador F2Diego VargasAún no hay calificaciones
- Informe N°4 Compuertas Nand y NorDocumento7 páginasInforme N°4 Compuertas Nand y NorjorgeAún no hay calificaciones
- Arquitectura Von Neumann y HarvardDocumento26 páginasArquitectura Von Neumann y HarvardUlivari Alexander GomezAún no hay calificaciones
- Lógica de CPUDocumento5 páginasLógica de CPURafael HernandezAún no hay calificaciones
- Arquitectura Von NeumannDocumento8 páginasArquitectura Von NeumannDaniel Medrano IzquierdoAún no hay calificaciones
- FTTH FurukawaDocumento6 páginasFTTH FurukawaoomariniAún no hay calificaciones
- Ingeniería de Tráfico - Lab1Documento8 páginasIngeniería de Tráfico - Lab1Jorgef CondegAún no hay calificaciones
- Guia de Ejercicios N - 11 - TPO Integrador - 24awd6bpDocumento3 páginasGuia de Ejercicios N - 11 - TPO Integrador - 24awd6bpmaxivellaAún no hay calificaciones
- Actividad 2.2 Comentar VideoDocumento3 páginasActividad 2.2 Comentar VideoFidel Reyes UrbaezAún no hay calificaciones
- 7 - Gestión de MemoriaDocumento10 páginas7 - Gestión de MemoriaArturo Daniel CordovaAún no hay calificaciones
- La Convergencia Entre La Seguridad Lógica y La Seguridad FísicaDocumento26 páginasLa Convergencia Entre La Seguridad Lógica y La Seguridad FísicaCarlos IsmaelAún no hay calificaciones
- Edgar CoddDocumento6 páginasEdgar CoddAsl YaelAún no hay calificaciones
- Información Windows Azure PlatformDocumento2 páginasInformación Windows Azure PlatformChandlerBing87Aún no hay calificaciones
- Vocabulario 1 Base de DatosDocumento2 páginasVocabulario 1 Base de DatosJose Edgardo GonzalezAún no hay calificaciones
- PresentaciónDocumento9 páginasPresentaciónIris MoralesAún no hay calificaciones
- AWS EKS CI - CD With AWS CodeCommit + AWS CodeBuild + AWS CodePipeline - Final - En.esDocumento21 páginasAWS EKS CI - CD With AWS CodeCommit + AWS CodeBuild + AWS CodePipeline - Final - En.esYSAAC NOE CORREA DE LA CRUZAún no hay calificaciones
- GR Control ComercialDocumento10 páginasGR Control ComercialCamilo GuiachettiAún no hay calificaciones
- Actividad 1Documento5 páginasActividad 1primer cuentaAún no hay calificaciones
- G1 Conocimientos GeneralesDocumento2 páginasG1 Conocimientos GeneralesduberjAún no hay calificaciones
- Qué Son Los Proveedores de Servicios de InternetDocumento3 páginasQué Son Los Proveedores de Servicios de InternetTdd SanaAún no hay calificaciones
- Ciberseguridad de Instituciones, Órganos y Organismos UEDocumento60 páginasCiberseguridad de Instituciones, Órganos y Organismos UEFreddy LopezAún no hay calificaciones
- 1.5.10 Packet Tracer - Verify Directly Connected Networks YosnelDocumento3 páginas1.5.10 Packet Tracer - Verify Directly Connected Networks YosnelYosnel Alberto Jiménez LedesmaAún no hay calificaciones
- Ficha Técnica - H&S de Un PCDocumento5 páginasFicha Técnica - H&S de Un PCSantiagoCifuentesAún no hay calificaciones
- Manual de Instalación Windows Paso A Paso: RequisitosDocumento5 páginasManual de Instalación Windows Paso A Paso: RequisitosAlejandro EscalanteAún no hay calificaciones
- Evidencia 3 Informe Identificacion de Las Tecnologias de La InformacionDocumento5 páginasEvidencia 3 Informe Identificacion de Las Tecnologias de La InformacionCindy Katherine Camargo GutierrezAún no hay calificaciones
- S8 OSI TCP-IP Rev2Documento33 páginasS8 OSI TCP-IP Rev2Anabella ParedesAún no hay calificaciones
- Ciberdelitos Se Registran 49 Amenazas Por Minuto en La ArgentinaDocumento3 páginasCiberdelitos Se Registran 49 Amenazas Por Minuto en La ArgentinaGervasio CespedesAún no hay calificaciones
- Balanceo de Carga Por Tipo de TraficoDocumento6 páginasBalanceo de Carga Por Tipo de TraficoAirNetworkAún no hay calificaciones
- El MicroprocesadorDocumento11 páginasEl MicroprocesadorConsuelo MarinAún no hay calificaciones
- Actividad 3Documento8 páginasActividad 3Sabrina ZanolettiAún no hay calificaciones
- Colotla Leydi Dispositivos MovilesDocumento2 páginasColotla Leydi Dispositivos MovilesLuis Xavier COLOTLA REYNOSOAún no hay calificaciones
- Plan de Estudios Ingenieria de Sistemas 2021-1Documento6 páginasPlan de Estudios Ingenieria de Sistemas 2021-1Carlos MoscolAún no hay calificaciones
- Sistema Operativo HaikuDocumento3 páginasSistema Operativo Haikusergio reyesAún no hay calificaciones