También podría gustarte
- Relacionar Los Espectros Atómicos y El Origen de Las Líneas Espectrales de Los Átomos de Acuerdo A La Teoría Cuántica.Documento8 páginasRelacionar Los Espectros Atómicos y El Origen de Las Líneas Espectrales de Los Átomos de Acuerdo A La Teoría Cuántica.Pablo Jesús100% (3)
- Manual de Usuario Indurpower 150-170Documento20 páginasManual de Usuario Indurpower 150-170Julio GajardoAún no hay calificaciones
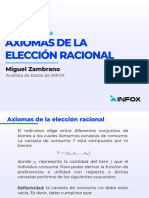
- 1.2 Axiomas de La Elección RacionalDocumento5 páginas1.2 Axiomas de La Elección RacionalAbraham Silva CardenssAún no hay calificaciones
- GRÁFICOS Stata BasicDocumento4 páginasGRÁFICOS Stata BasicAbraham Silva CardenssAún no hay calificaciones
- Trabajo de Macro - Indicadores de La Economía - 03-11Documento34 páginasTrabajo de Macro - Indicadores de La Economía - 03-11Abraham Silva CardenssAún no hay calificaciones
- Actividad Final de MacroeconomiaDocumento15 páginasActividad Final de MacroeconomiaAbraham Silva CardenssAún no hay calificaciones
- ED5 TCP Solucionario PDFDocumento9 páginasED5 TCP Solucionario PDFAbraham Silva CardenssAún no hay calificaciones
- Medios y Comunicación en Tiempos de Posverdad-12-29Documento18 páginasMedios y Comunicación en Tiempos de Posverdad-12-29Abraham Silva CardenssAún no hay calificaciones
- Ilovepdf MergedDocumento11 páginasIlovepdf MergedAbraham Silva CardenssAún no hay calificaciones
- Semana 8Documento29 páginasSemana 8Abraham Silva CardenssAún no hay calificaciones
- Dialnet RelacionLiteraturaYRealidad 7007284Documento11 páginasDialnet RelacionLiteraturaYRealidad 7007284Abraham Silva CardenssAún no hay calificaciones
- Ed1 Opt1 2022 - 1Documento1 páginaEd1 Opt1 2022 - 1Abraham Silva CardenssAún no hay calificaciones
- ED10 2021-II RptasDocumento3 páginasED10 2021-II RptasAbraham Silva CardenssAún no hay calificaciones
- Ed3 E1opt1Documento2 páginasEd3 E1opt1Abraham Silva CardenssAún no hay calificaciones
- ED12 2021-II RptasDocumento4 páginasED12 2021-II RptasAbraham Silva CardenssAún no hay calificaciones
- ESusti FDC 2019 I SolucionarioDocumento3 páginasESusti FDC 2019 I SolucionarioAbraham Silva CardenssAún no hay calificaciones
- Econ Inv20 Preu IntroduccionDocumento2 páginasEcon Inv20 Preu IntroduccionAbraham Silva CardenssAún no hay calificaciones
- Calapenshko-Aritmetica - Paginacion PDFDocumento49 páginasCalapenshko-Aritmetica - Paginacion PDFAbraham Silva Cardenss50% (2)
- Analisis Matematico I PDFDocumento16 páginasAnalisis Matematico I PDFLee Farromeque EyzaguirreAún no hay calificaciones
- L1-Balanza de JollyDocumento13 páginasL1-Balanza de JollyKim Arty SelAún no hay calificaciones
- 3.4 Resumen Tecnicas de Inspeccion VolumetricaDocumento5 páginas3.4 Resumen Tecnicas de Inspeccion VolumetricaDanny libardo León GómezAún no hay calificaciones
- AaaasandfoliDocumento233 páginasAaaasandfoliMario CasasAún no hay calificaciones
- Teoria ElectromagneticaDocumento64 páginasTeoria ElectromagneticaGabriela Mayorga SanchezAún no hay calificaciones
- Actividad 1Documento1 páginaActividad 1Naiden GaitanAún no hay calificaciones
- Historia de La Teoría AtómicaDocumento5 páginasHistoria de La Teoría Atómicaana moralesAún no hay calificaciones
- Medidor Multifasico TopFlow Rev1Documento62 páginasMedidor Multifasico TopFlow Rev1montanovillarroelfabiolalourdeAún no hay calificaciones
- Actividades Tercer Trimestre Ciencias Ii FísicaDocumento3 páginasActividades Tercer Trimestre Ciencias Ii FísicaVicente GuerreroAún no hay calificaciones
- Ejercicios Física Del Estado SólidoDocumento2 páginasEjercicios Física Del Estado SólidoMario Soto MAún no hay calificaciones
- 9 Introduccion Al TelurimetroDocumento7 páginas9 Introduccion Al TelurimetroIvan LorenzattiAún no hay calificaciones
- Informe Laboratorio - OdtDocumento13 páginasInforme Laboratorio - OdtMateo Parada DimateAún no hay calificaciones
- Ejercicios Resueltos Del Libro de Griffiths "Introduction To Electrodynamics".Documento20 páginasEjercicios Resueltos Del Libro de Griffiths "Introduction To Electrodynamics".Gabriela Alessandra Villacorta GarcíaAún no hay calificaciones
- Practica 1 Mediciones y GraficosDocumento16 páginasPractica 1 Mediciones y GraficosfabianAún no hay calificaciones
- 11 TrabesDocumento44 páginas11 TrabesangelicalbotacioaAún no hay calificaciones
- Informe #11 - Variación de La Solubilidad Con La TemperaturaDocumento10 páginasInforme #11 - Variación de La Solubilidad Con La TemperaturaDevra GomezAún no hay calificaciones
- S08.s1 - MaterialDocumento34 páginasS08.s1 - MaterialCristhian ZacariasAún no hay calificaciones
- Mecatronica Jonathan GomezDocumento4 páginasMecatronica Jonathan GomezCristián Alonso Gómez GómezAún no hay calificaciones
- Principios de Las Pruebas TriaxialesDocumento2 páginasPrincipios de Las Pruebas TriaxialesWilmer Cordova CruzAún no hay calificaciones
- Einstein y Tales de MIletoDocumento26 páginasEinstein y Tales de MIletoYari MarreroAún no hay calificaciones
- CBR Soporte de CaliforniaDocumento14 páginasCBR Soporte de CaliforniaCristian GarciaAún no hay calificaciones
- Plantilla de Excel NominaDocumento15 páginasPlantilla de Excel NominaLaura TorresAún no hay calificaciones
- Informe-Fuerza Sobre Superficies SumergidasDocumento4 páginasInforme-Fuerza Sobre Superficies SumergidasMateo IglesiasAún no hay calificaciones
- Prevencion de Riesgos ElectricosDocumento54 páginasPrevencion de Riesgos Electricosgeav25653855Aún no hay calificaciones
- Deber LogaritmoDocumento4 páginasDeber LogaritmoJ NANDOAún no hay calificaciones
- Actividad Previas 2 - Calor de ReacciónDocumento4 páginasActividad Previas 2 - Calor de ReacciónJosh BHAún no hay calificaciones
- LuxoxigesowujuvezozDocumento4 páginasLuxoxigesowujuvezozCARLOS FABRICIO NAVARRETE GAMBOAAún no hay calificaciones
- ElectrodinamicaDocumento37 páginasElectrodinamicaMayki Fuertes AlizaresAún no hay calificaciones