También podría gustarte
- Guia para El Registro de Nuevo Usuario DeclaraNet PDFDocumento4 páginasGuia para El Registro de Nuevo Usuario DeclaraNet PDFJose Alcala MolinaAún no hay calificaciones
- Cin2015a20121 PDFDocumento15 páginasCin2015a20121 PDFLucio ChAún no hay calificaciones
- Formato de La Declaracion de Modificacion2020Documento20 páginasFormato de La Declaracion de Modificacion2020Karla Areli VFAún no hay calificaciones
- DronesDocumento5 páginasDronesmagdhieloAún no hay calificaciones
- Declaración patrimonialDocumento20 páginasDeclaración patrimonialOsiel CanoAún no hay calificaciones
- Gu A R Pida DeclaraNet 2020Documento15 páginasGu A R Pida DeclaraNet 2020Martin PerezAún no hay calificaciones
- Guia para La Recuperación de Contraseña DeclaraNetDocumento5 páginasGuia para La Recuperación de Contraseña DeclaraNethectorAún no hay calificaciones
- Formato de La Declaracion de Conclusion2020Documento21 páginasFormato de La Declaracion de Conclusion2020Leticia GomezAún no hay calificaciones
- GUIA PRACTICA DE USUARIO DEL SISTEMA DeclaraNet PDFDocumento20 páginasGUIA PRACTICA DE USUARIO DEL SISTEMA DeclaraNet PDFOscar Miguel Alanis RivasAún no hay calificaciones
- Cot. Ep0246 - Equipamiento para Invernadero Sistema NFTDocumento1 páginaCot. Ep0246 - Equipamiento para Invernadero Sistema NFTmagdhieloAún no hay calificaciones
- TERCERA PARTE Solucion Nutritiva Cultivos Hidrop+ NicosDocumento12 páginasTERCERA PARTE Solucion Nutritiva Cultivos Hidrop+ NicosFaBenRa147Aún no hay calificaciones
- In Verna DeroDocumento16 páginasIn Verna DeroGerardo SánchezAún no hay calificaciones
- Manejo postcosecha berriesDocumento5 páginasManejo postcosecha berriesmagdhieloAún no hay calificaciones
- Produccion Hidroponica de FresaDocumento6 páginasProduccion Hidroponica de FresaGiorgio Sánchez100% (1)
- Sistemas Hidroponicos y Soluciones Nutritivas para Fresas PDFDocumento4 páginasSistemas Hidroponicos y Soluciones Nutritivas para Fresas PDFJosé EspinosaAún no hay calificaciones
- La Industria de Los Cultivos HidroponicosDocumento4 páginasLa Industria de Los Cultivos HidroponicosmagdhieloAún no hay calificaciones
- Cot. Ep0246 - Equipamiento para Invernadero Sistema NFTDocumento1 páginaCot. Ep0246 - Equipamiento para Invernadero Sistema NFTmagdhieloAún no hay calificaciones
- Opciones de Ácidos para Disminuir La Alcalinidad Del AguaDocumento11 páginasOpciones de Ácidos para Disminuir La Alcalinidad Del AguamagdhieloAún no hay calificaciones
- Spanish Module 5 Fertilizer - SpeakerNotes - 2016 06 PDFDocumento33 páginasSpanish Module 5 Fertilizer - SpeakerNotes - 2016 06 PDFJuan GarayAún no hay calificaciones
- Propuesta de Un Modelo de Negocio para La Producción de Lechuga PDFDocumento92 páginasPropuesta de Un Modelo de Negocio para La Producción de Lechuga PDFYersen N. Espinoza ChavezAún no hay calificaciones
- Preparacion Fertilizantes para Fertirriego 2018 PDFDocumento46 páginasPreparacion Fertilizantes para Fertirriego 2018 PDFYul Geronimo Pardo Berastein100% (1)
- Tesis - Pedro Marván García de QuevedoDocumento90 páginasTesis - Pedro Marván García de QuevedolordthedarksideAún no hay calificaciones
- Planificación de La ProducciónDocumento8 páginasPlanificación de La ProducciónIsabel Rocio Vilcas TacsaAún no hay calificaciones
- Otro 622 Soluciones NutritivasDocumento118 páginasOtro 622 Soluciones NutritivasAriel GuerreroAún no hay calificaciones
- Negocios Hidopónicos Retiro AntioquiaDocumento54 páginasNegocios Hidopónicos Retiro AntioquiaFrannSanguinetiArenaAún no hay calificaciones
- Castañeda Francisco - Manual de HidroponiaDocumento68 páginasCastañeda Francisco - Manual de HidroponiaEduardo100% (20)
- Manual de Hidroponia MediaDocumento32 páginasManual de Hidroponia Mediagheoda8926100% (1)
- Solucion NutriDocumento2 páginasSolucion NutrimagdhieloAún no hay calificaciones
- Nutrición Hidroponia MioDocumento27 páginasNutrición Hidroponia MiomagdhieloAún no hay calificaciones
- Formulación vegetativa 0-30 días optimizada paraDocumento20 páginasFormulación vegetativa 0-30 días optimizada paramagdhieloAún no hay calificaciones
- Tipos de Cereales de Mayor Consumo en El Estado PortuguesaDocumento24 páginasTipos de Cereales de Mayor Consumo en El Estado PortuguesaKarina SilvaAún no hay calificaciones
- Origen Fertilidad de Suelos Ed - Chilon 2018Documento20 páginasOrigen Fertilidad de Suelos Ed - Chilon 2018EduardochilonAún no hay calificaciones
- Costos de Producion Cultivo de PlatanoDocumento1 páginaCostos de Producion Cultivo de PlatanoCarlos PadreAún no hay calificaciones
- Zapallo SigiaDocumento9 páginasZapallo SigiaOsderuz 95Aún no hay calificaciones
- LOMBRICULTURADocumento19 páginasLOMBRICULTURAEVA ARECHIGA CORONA100% (1)
- Formación de Formadores Prácticas AgroecológicasDocumento5 páginasFormación de Formadores Prácticas Agroecológicassamuel medinaAún no hay calificaciones
- Botanica - Agricultura - Libro - Pequeña Enciclopedia de Agricultura 06 La Cria Del Ganado (Larbaletrier A - 1900)Documento179 páginasBotanica - Agricultura - Libro - Pequeña Enciclopedia de Agricultura 06 La Cria Del Ganado (Larbaletrier A - 1900)Ignacio VenturiniAún no hay calificaciones
- NMX Aa 180 Scfi 2018Documento52 páginasNMX Aa 180 Scfi 2018Ever BioverdemexAún no hay calificaciones
- Generalidades de La ApiculturaDocumento2 páginasGeneralidades de La ApiculturacarmenAún no hay calificaciones
- NMX FF 037 1994Documento10 páginasNMX FF 037 1994Cristian MartinezAún no hay calificaciones
- Cosechadora e ImplementosDocumento16 páginasCosechadora e ImplementosCemza Morales ZamudioAún no hay calificaciones
- Cancionero InfantilDocumento15 páginasCancionero InfantilAlcides RuanoAún no hay calificaciones
- Desarrollo Socioeconómico GuatemalaDocumento57 páginasDesarrollo Socioeconómico GuatemalaSucel IbáñezAún no hay calificaciones
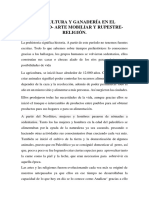
- Agricultura y Ganadería en El NeoliticoDocumento4 páginasAgricultura y Ganadería en El NeoliticoPatricia Gabela ErazoAún no hay calificaciones
- Control Granja de Los AnimalesDocumento4 páginasControl Granja de Los AnimalesPablo Leonardo Troncoso Castro100% (1)
- Flores TulipanesDocumento7 páginasFlores TulipanesMaria Guadalupe Elías López100% (2)
- Ficha Tecnica - Portulaca GrandifloraDocumento1 páginaFicha Tecnica - Portulaca GrandifloraCristiam Loayza RoaAún no hay calificaciones
- Importancia de la agronomía y sus divisionesDocumento7 páginasImportancia de la agronomía y sus divisionesSebastian Raul Renteria LinaresAún no hay calificaciones
- Val 04 Marzo - Adicional N°02Documento51 páginasVal 04 Marzo - Adicional N°02Luis Enrique Napa RamirezAún no hay calificaciones
- Sesión 7 Cultura ChavínDocumento11 páginasSesión 7 Cultura ChavínJose AlarconAún no hay calificaciones
- Machaca Vladimir Quispe EbertDocumento117 páginasMachaca Vladimir Quispe EbertChristian H. VelasquezAún no hay calificaciones
- BACTHONDocumento4 páginasBACTHONjose lisandroAún no hay calificaciones
- PPF víctimas desplazamientoDocumento101 páginasPPF víctimas desplazamientoalferfory1979Aún no hay calificaciones
- Cultura moche: arte, religión y sociedad de los señores del norte peruanoDocumento15 páginasCultura moche: arte, religión y sociedad de los señores del norte peruanoMarco Antonio Amapanqui BroncanoAún no hay calificaciones
- Bonilla Juan Prueba2Documento3 páginasBonilla Juan Prueba2juan bonillaAún no hay calificaciones
- Ensayo-Patrones de DeforestaciónDocumento25 páginasEnsayo-Patrones de Deforestaciónmaría JoséAún no hay calificaciones
- BoliviaDocumento4 páginasBoliviadavidAún no hay calificaciones
- Huertos urbanos y ODSDocumento4 páginasHuertos urbanos y ODSNat PlusAún no hay calificaciones
- EvaluacionDocumento33 páginasEvaluacionJersonLimaymantaSalazar100% (1)
- Quinua Instantánea en Polvo: Universidad Mayor de San Simón Facultad de Ciencias Farmacéuticas Y BioquímicasDocumento17 páginasQuinua Instantánea en Polvo: Universidad Mayor de San Simón Facultad de Ciencias Farmacéuticas Y BioquímicasIllanes CarmenAún no hay calificaciones
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (116)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaDe EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaCalificación: 5 de 5 estrellas5/5 (1)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetDe EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetCalificación: 5 de 5 estrellas5/5 (7)
- Auditoría de seguridad informática: Curso prácticoDe EverandAuditoría de seguridad informática: Curso prácticoCalificación: 5 de 5 estrellas5/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Aprender Illustrator 2020 con 100 ejercicios prácticosDe EverandAprender Illustrator 2020 con 100 ejercicios prácticosAún no hay calificaciones
- El trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoDe EverandEl trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoCalificación: 4 de 5 estrellas4/5 (30)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Gestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosDe EverandGestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosCalificación: 5 de 5 estrellas5/5 (3)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- APLICACIONES PRACTICAS CON EXCELDe EverandAPLICACIONES PRACTICAS CON EXCELCalificación: 4.5 de 5 estrellas4.5/5 (6)
- AngularJS: Conviértete en el profesional que las compañías de software necesitan.De EverandAngularJS: Conviértete en el profesional que las compañías de software necesitan.Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Guía de HTML5, CSS3 y Javascript. La Web 2.0De EverandGuía de HTML5, CSS3 y Javascript. La Web 2.0Calificación: 3.5 de 5 estrellas3.5/5 (2)
- Guía De Hacking De Computadora Para Principiantes: Cómo Hackear Una Red Inalámbrica Seguridad Básica Y Pruebas De Penetración Kali Linux Su Primer HackDe EverandGuía De Hacking De Computadora Para Principiantes: Cómo Hackear Una Red Inalámbrica Seguridad Básica Y Pruebas De Penetración Kali Linux Su Primer HackAún no hay calificaciones
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- G.P.S. para jovenes CristianosDe EverandG.P.S. para jovenes CristianosCalificación: 4.5 de 5 estrellas4.5/5 (3)