También podría gustarte
- Caso PrácticoDocumento3 páginasCaso PrácticoGabriela Llerena0% (2)
- Cinematica de Robots - IIDocumento42 páginasCinematica de Robots - IIGabriela LlerenaAún no hay calificaciones
- Dina MicaDocumento21 páginasDina MicaGabriela LlerenaAún no hay calificaciones
- Resumen Unidad 3Documento5 páginasResumen Unidad 3Gabriela LlerenaAún no hay calificaciones
- Implantación de RobotsDocumento29 páginasImplantación de RobotsGabriela Llerena100% (1)
- 2023-156-001-0001 Ma Cto - Contrato Laboral Gerente - Hotel One SixteenDocumento8 páginas2023-156-001-0001 Ma Cto - Contrato Laboral Gerente - Hotel One SixteenRaul pedrazaAún no hay calificaciones
- 1 Enigmas en El AireDocumento7 páginas1 Enigmas en El AireRubén RVAún no hay calificaciones
- 1.toyota Llave G PDFDocumento38 páginas1.toyota Llave G PDFWILLIAM AGUDELO100% (3)
- Curso de Electrónica - Electrónica Digital - Parte 9 - Contadores Digitales (CUR6002S)Documento32 páginasCurso de Electrónica - Electrónica Digital - Parte 9 - Contadores Digitales (CUR6002S)PabloAún no hay calificaciones
- Angel Redondo JoseLuis FOL01 TareaDocumento13 páginasAngel Redondo JoseLuis FOL01 Tareatrianapumpum100% (1)
- Examen de Excel 2016Documento5 páginasExamen de Excel 2016kevin Acosta ChAún no hay calificaciones
- Código BCD, GREY, ASCIIDocumento8 páginasCódigo BCD, GREY, ASCIIhola2Aún no hay calificaciones
- Informe Requerimiento 2018-IDocumento3 páginasInforme Requerimiento 2018-IEduardo Benique Mendoza100% (3)
- Pasos para Validar Licencia - Autodesk AutoCAD Civil 3D 2018Documento22 páginasPasos para Validar Licencia - Autodesk AutoCAD Civil 3D 2018Saniel MartinezAún no hay calificaciones
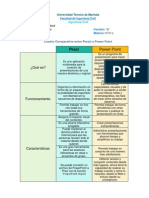
- Cuandro Comparativo Prezzi y PPT - Ayrton - OrtizDocumento1 páginaCuandro Comparativo Prezzi y PPT - Ayrton - OrtizAyrton OrtizAún no hay calificaciones
- Arquitectura y Configuracion en IBM Blade Center Revision Tecnica Conectividad y Open FabricDocumento79 páginasArquitectura y Configuracion en IBM Blade Center Revision Tecnica Conectividad y Open FabricLuis Nicolas Vasquez PercovichAún no hay calificaciones
- Guia - Joaquin Barbera - Herramientas de Inteligencia Artificial (LM-IA-V-1-0-Abril-2023)Documento12 páginasGuia - Joaquin Barbera - Herramientas de Inteligencia Artificial (LM-IA-V-1-0-Abril-2023)humbertof9Aún no hay calificaciones
- EXAMEN FINAL TEORIA DE COTROL - 2020.okDocumento5 páginasEXAMEN FINAL TEORIA DE COTROL - 2020.okRoberto BuelvasAún no hay calificaciones
- LAYOUT DISEÑO DE PLANTA Ingenieria de MetodosDocumento4 páginasLAYOUT DISEÑO DE PLANTA Ingenieria de MetodosMayron F. Terán SilesAún no hay calificaciones
- Ejemplo Marco AplicacionDocumento6 páginasEjemplo Marco AplicacionVirinei PexioxaAún no hay calificaciones
- Datos Faltantes Con MatlabDocumento6 páginasDatos Faltantes Con MatlabPAULO CESAR CARHUANCHO VERAAún no hay calificaciones
- 2 - 2 Catalogo de Puestos PDFDocumento2 páginas2 - 2 Catalogo de Puestos PDFAnel Cuéllar HernándezAún no hay calificaciones
- WWW Gamalevante Com DibalDocumento6 páginasWWW Gamalevante Com DibalSamuel Rivero JimenezAún no hay calificaciones
- Google Ads Measurement Certification Exam Answers ES+LATAM Version New VersionDocumento303 páginasGoogle Ads Measurement Certification Exam Answers ES+LATAM Version New VersionAnoni HomemAún no hay calificaciones
- Esquemas SICDocumento6 páginasEsquemas SICNegrowaag ArizmendyAún no hay calificaciones
- Unidad 2 Algoritmos Basicos de Dibujo en 2 Dimensiones PDFDocumento40 páginasUnidad 2 Algoritmos Basicos de Dibujo en 2 Dimensiones PDFCarlos MichuAún no hay calificaciones
- Actividad2 - POO - Bruno Gayosso ReenvidaDocumento9 páginasActividad2 - POO - Bruno Gayosso ReenvidaTakeshi KovacsAún no hay calificaciones
- Modelo CanvasDocumento13 páginasModelo CanvasDybeth GomezAún no hay calificaciones
- Ups CT005203Documento128 páginasUps CT005203Juan Carlos FajardoAún no hay calificaciones
- Ingenieros Excel 2010 y 2007Documento225 páginasIngenieros Excel 2010 y 2007Arturo VelascoAún no hay calificaciones
- Tecnológico Nacional de México Instituto Tecnológico de AcapulcoDocumento3 páginasTecnológico Nacional de México Instituto Tecnológico de AcapulcoCoffee BearAún no hay calificaciones
- 9plan de Clase Tecnología 9° 2PDocumento9 páginas9plan de Clase Tecnología 9° 2PFaver AnguloAún no hay calificaciones
- Exposición de Correo ElectrónicoDocumento10 páginasExposición de Correo ElectrónicomeliyirmariAún no hay calificaciones
- Empezando Con Alfresco PDFDocumento24 páginasEmpezando Con Alfresco PDFRodolfo Enrique SuarezAún no hay calificaciones
- Taller Rap 3 ResueltoDocumento11 páginasTaller Rap 3 ResueltoSebastián Carvajal100% (1)