También podría gustarte
- 100 Circuitos de Audio (ES) - volume 1De Everand100 Circuitos de Audio (ES) - volume 1Calificación: 5 de 5 estrellas5/5 (2)
- Control de Calidad DecátodosDocumento58 páginasControl de Calidad DecátodosRodrigo Andres100% (5)
- Presupuesto APP MOVILDocumento6 páginasPresupuesto APP MOVILViktor Olivares100% (1)
- Esquema Simulador ECU 5Documento1 páginaEsquema Simulador ECU 5Max0% (1)
- Metodos para La Medicion de Tierra RDocumento5 páginasMetodos para La Medicion de Tierra RRob ZapAún no hay calificaciones
- Baf-1585 AmplificadorDocumento1 páginaBaf-1585 AmplificadorGonzalo Rios86% (7)
- GUIA #02 Aplicando El Método AQPDocumento1 páginaGUIA #02 Aplicando El Método AQPistpcAún no hay calificaciones
- Diagrama Esquemático de Un Inversor de Voltaje DCDocumento4 páginasDiagrama Esquemático de Un Inversor de Voltaje DCalexis jonathanAún no hay calificaciones
- Sanway d20k Diagrama Out Clase DDocumento1 páginaSanway d20k Diagrama Out Clase DMoises Shente50% (6)
- Plano 7 Esquema Unifilar CGMP Servicios Generales PDFDocumento1 páginaPlano 7 Esquema Unifilar CGMP Servicios Generales PDFGusAún no hay calificaciones
- Claves descarga FTP programas radiosDocumento3 páginasClaves descarga FTP programas radiosDavid Josué Fernández PascualAún no hay calificaciones
- Apuntes Versión 2Documento151 páginasApuntes Versión 2ivanAún no hay calificaciones
- Laboratorio 2 ControlavanzadoDocumento12 páginasLaboratorio 2 ControlavanzadoOrlando Bustamante FernandezAún no hay calificaciones
- Diagrama Del Mezclador de 4 CanalesDocumento1 páginaDiagrama Del Mezclador de 4 CanalesWalter Estady SG100% (1)
- Max 310X 410X 710X Circuito Con AnotacionesDocumento1 páginaMax 310X 410X 710X Circuito Con Anotacioneslucas delamer100% (1)
- Examen de Unidad 4 InstrumentaciónDocumento8 páginasExamen de Unidad 4 InstrumentaciónRíos Luna MauricioAún no hay calificaciones
- Estacion de Calor - 01Documento1 páginaEstacion de Calor - 01Kellys GonzalezAún no hay calificaciones
- 208 InyeccionDocumento3 páginas208 InyeccionEzequielAún no hay calificaciones
- Subwoofer Activo CompletoDocumento2 páginasSubwoofer Activo CompletoLucas YeniddinAún no hay calificaciones
- Manual Usuario AmplificadorDocumento6 páginasManual Usuario AmplificadorDaniel Tenezaca BejaranoAún no hay calificaciones
- PWMDocumento1 páginaPWMJAEM9509030% (1)
- AmplificadorDocumento6 páginasAmplificadorLuis Enrique VaqueraAún no hay calificaciones
- Electrificador Picana Solar - Ipk4 (Reforma)Documento1 páginaElectrificador Picana Solar - Ipk4 (Reforma)eov47Aún no hay calificaciones
- Practica 12Documento6 páginasPractica 12LuchoSangoquizaAún no hay calificaciones
- PWM-Modulador de ancho de pulsoDocumento7 páginasPWM-Modulador de ancho de pulsoMichael Infantes HuacancaAún no hay calificaciones
- Circuito de protección con fusible electrónico regulable hasta 10ADocumento1 páginaCircuito de protección con fusible electrónico regulable hasta 10Arogermantilla08Aún no hay calificaciones
- Receptor 2 Metros SencilloDocumento1 páginaReceptor 2 Metros SencilloJUAN CARLOS OSORIO TORRESAún no hay calificaciones
- Circ 3-Contador Fotoelectrico Personas ObjetosDocumento1 páginaCirc 3-Contador Fotoelectrico Personas ObjetosDavid ChavezAún no hay calificaciones
- Diagrama Standar de Arranque Directo - Tableros de Pozos Lote IV. (23885)Documento1 páginaDiagrama Standar de Arranque Directo - Tableros de Pozos Lote IV. (23885)ann100% (1)
- Simulaciones de circuitos electrónicosDocumento2 páginasSimulaciones de circuitos electrónicosLuis Mauricio Averanga VergaraAún no hay calificaciones
- Proyecto Carro 4x4 BluetoothDocumento5 páginasProyecto Carro 4x4 BluetoothyerryAún no hay calificaciones
- 3° Preinforme Epii - Canales Escalante, Carlos Andrés (1513220485)Documento5 páginas3° Preinforme Epii - Canales Escalante, Carlos Andrés (1513220485)Carlos AndrésAún no hay calificaciones
- Practica Huaman Informe 2.2Documento7 páginasPractica Huaman Informe 2.2REINER HUAMAN ONOFREAún no hay calificaciones
- Guia Laboratorio 555 y Flip FlopDocumento4 páginasGuia Laboratorio 555 y Flip FlopXavier PositivoAún no hay calificaciones
- SPWMDocumento3 páginasSPWMRobertoCollantesSaenzAún no hay calificaciones
- TP4 InversorDocumento2 páginasTP4 InversorestancierobrisaAún no hay calificaciones
- PRACTICA7 Inversor Medio Puente 2019BDocumento4 páginasPRACTICA7 Inversor Medio Puente 2019BJaime GarciaAún no hay calificaciones
- Schema Electrica 2Documento1 páginaSchema Electrica 2Lupu SorinAún no hay calificaciones
- Contador00-59 373Documento6 páginasContador00-59 373Leo EscobarAún no hay calificaciones
- Práctica No - 1 Comparador de VentanaDocumento3 páginasPráctica No - 1 Comparador de VentanaCristian DamianAún no hay calificaciones
- Circuito v2 Cancelador de QRM ValvularDocumento1 páginaCircuito v2 Cancelador de QRM ValvularFernando MoralesAún no hay calificaciones
- Diagrama CH3_5Vx3ADocumento1 páginaDiagrama CH3_5Vx3Aguelba2024Aún no hay calificaciones
- Practica 4 Electronica Ii PDFDocumento2 páginasPractica 4 Electronica Ii PDFexodusAún no hay calificaciones
- Informe LM35Documento9 páginasInforme LM35Jimmy JimenezAún no hay calificaciones
- Gradiente K-341Documento14 páginasGradiente K-341jampcarlosAún no hay calificaciones
- Inversor SG3525 Version Mejorada 2019Documento1 páginaInversor SG3525 Version Mejorada 2019Alfredo De La Hoz Guarin100% (4)
- Generador SPWM con Arduino para inversor monofásicoDocumento3 páginasGenerador SPWM con Arduino para inversor monofásicoGustavo Rodriguez0% (1)
- Amp ExpandibleDocumento21 páginasAmp ExpandibleJuanda AlvarezAún no hay calificaciones
- Unidad VII Elkai1 PDFDocumento6 páginasUnidad VII Elkai1 PDFOmar Alonso Mendoza VillaAún no hay calificaciones
- Sensor de NivelDocumento3 páginasSensor de NivelAndres VásquezAún no hay calificaciones
- 16 - SISTEMA DE ENCENDIDO - CONTROLADOR CDI+i3sDocumento16 páginas16 - SISTEMA DE ENCENDIDO - CONTROLADOR CDI+i3scamilo perazaAún no hay calificaciones
- Fuente Conmutada EDA-6515 .AscDocumento1 páginaFuente Conmutada EDA-6515 .AscJacintoRodriguesAún no hay calificaciones
- Plano Diagrama Elemental de Control e Instrumentacion de Crimpeadora Electroneumatica-ModelDocumento1 páginaPlano Diagrama Elemental de Control e Instrumentacion de Crimpeadora Electroneumatica-ModelMoises Tacuri MataqqueAún no hay calificaciones
- PROTECTORESDocumento4 páginasPROTECTORESRicardo Viera91% (46)
- Amplificador monofónico de 400W de potencia con diagrama eléctrico y valores recomendadosDocumento9 páginasAmplificador monofónico de 400W de potencia con diagrama eléctrico y valores recomendadosjayanathAún no hay calificaciones
- Conexionado MM430Documento2 páginasConexionado MM430Pablo ZirpoloAún no hay calificaciones
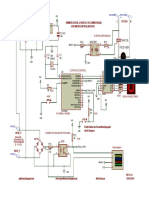
- Dimmer Digital Con Microcontrolador PIC PDFDocumento1 páginaDimmer Digital Con Microcontrolador PIC PDFEdwin Llico FustamanteAún no hay calificaciones
- Dimmer Digital Con Microcontrolador PIC PDFDocumento1 páginaDimmer Digital Con Microcontrolador PIC PDFEdwin Llico FustamanteAún no hay calificaciones
- Practica No 7 Amplificador de InstrumentacionDocumento4 páginasPractica No 7 Amplificador de InstrumentacionLuis AlbaveraAún no hay calificaciones
- Planos AtecDocumento11 páginasPlanos AtecYeimy CoretAún no hay calificaciones
- Analisis de Pozos Con Alta Producción de AguaDocumento6 páginasAnalisis de Pozos Con Alta Producción de AguaLouse InnobaAún no hay calificaciones
- Ficha Tecnica Fabricacion de LadrilloDocumento2 páginasFicha Tecnica Fabricacion de LadrilloLiliana OrduzAún no hay calificaciones
- Química Autocalificables Semana 3 .... Segunda VueltaDocumento3 páginasQuímica Autocalificables Semana 3 .... Segunda VueltaDavid CruzAún no hay calificaciones
- GJFDGDocumento16 páginasGJFDGluigi AlbertAún no hay calificaciones
- Puesta A Tierra Con BalanceoDocumento17 páginasPuesta A Tierra Con BalanceoRosse Bernardo TandaypanAún no hay calificaciones
- Cómo Hacer Un Cuadernillo A5 en WordDocumento2 páginasCómo Hacer Un Cuadernillo A5 en WordPayasoTecnoAún no hay calificaciones
- Taller de ReactoresDocumento13 páginasTaller de ReactoresDiego CerqueraAún no hay calificaciones
- Enzimas en Producción de PapelDocumento2 páginasEnzimas en Producción de PapeldinerAún no hay calificaciones
- Requisitos mínimos instalaciones y condiciones laboralesDocumento5 páginasRequisitos mínimos instalaciones y condiciones laboralesLeidy Johana Gomez GomezAún no hay calificaciones
- CTE DB (HE4 y HE5)Documento46 páginasCTE DB (HE4 y HE5)albertoAún no hay calificaciones
- Evaluación Técnica HuaweiDocumento5 páginasEvaluación Técnica HuaweiAdriana Mastrascusa CantilloAún no hay calificaciones
- Matba Ing 6559 TRP-S4 N°1Documento5 páginasMatba Ing 6559 TRP-S4 N°1Aracely SeguraAún no hay calificaciones
- TesisDocumento13 páginasTesisGenaro Elmer Sifuentes DamiánAún no hay calificaciones
- Motor síncrono: introducción, funcionamiento y característicasDocumento4 páginasMotor síncrono: introducción, funcionamiento y característicasJuanLojaObregonAún no hay calificaciones
- Universidad Nacional de Ingenieria FrancisDocumento29 páginasUniversidad Nacional de Ingenieria FrancisFrancisco MartinezAún no hay calificaciones
- Configurar AP modo WDS+APDocumento12 páginasConfigurar AP modo WDS+APHenry PintoAún no hay calificaciones
- Xiaopan 0Documento5 páginasXiaopan 0Daniel RraAún no hay calificaciones
- Reporteec Rentas 10460461630 20230409181529Documento2 páginasReporteec Rentas 10460461630 20230409181529Luis GarroAún no hay calificaciones
- Tipos de BombasDocumento6 páginasTipos de BombasSahara BolivarAún no hay calificaciones
- Qué es la potencia eléctricaDocumento5 páginasQué es la potencia eléctricaEdwinAún no hay calificaciones
- Funvisis PDFDocumento120 páginasFunvisis PDFjailyneAún no hay calificaciones
- Dinamica y Estatica de Fluidos 1 - 2018Documento8 páginasDinamica y Estatica de Fluidos 1 - 2018Jhonny David Iquise Ope100% (1)
- Novedades Personal Universal 2019Documento29 páginasNovedades Personal Universal 2019alejandraAún no hay calificaciones
- Mecánica 07Documento52 páginasMecánica 07Derlis Romero100% (3)
- Ficha Electrica Videobroncoscopio Bf-1th190Documento2 páginasFicha Electrica Videobroncoscopio Bf-1th190DEPARTAMENTO TECNICOAún no hay calificaciones