También podría gustarte
- Copia de PRUEBA DE ADMISION EXCELDocumento78 páginasCopia de PRUEBA DE ADMISION EXCELJohanna Castrillon50% (4)
- Laboratory Ecuaciones CuadraticasDocumento7 páginasLaboratory Ecuaciones CuadraticasmixaAún no hay calificaciones
- Enfriamiento Sensible EJERCIRIOS RESUELTOSDocumento11 páginasEnfriamiento Sensible EJERCIRIOS RESUELTOSMichelle EAún no hay calificaciones
- Tarea de Termo FCDocumento3 páginasTarea de Termo FCgema katiuska parraga brionesAún no hay calificaciones
- Reactor Con RecirculaciónDocumento2 páginasReactor Con RecirculaciónFernandaMunsterAún no hay calificaciones
- Reporte Mecanica Lab - p2Documento6 páginasReporte Mecanica Lab - p2MARIJOSE GONZALEZ DEL REALAún no hay calificaciones
- Sistema de Inventario para DrogueriaDocumento13 páginasSistema de Inventario para DrogueriaJarvi Alexis Mancilla MoraAún no hay calificaciones
- Práctica de Laboratorio Sobre Lentes DelgadasDocumento9 páginasPráctica de Laboratorio Sobre Lentes DelgadasEduardo PantojaAún no hay calificaciones
- Act. 2. Razon de Cambio y Tangente de Una CurvaDocumento6 páginasAct. 2. Razon de Cambio y Tangente de Una CurvabaktunAún no hay calificaciones
- Tarea 03Documento2 páginasTarea 03Roger Rojas PadillaAún no hay calificaciones
- Reacciones SimplesDocumento5 páginasReacciones SimplesFRANS ROMOAún no hay calificaciones
- Actividad #01. Sistema de Unidades. Factores Numéricos de Conversión. Ecuaciones Dimensionales. Física I. USMP. Ciclo 2016 - IDocumento5 páginasActividad #01. Sistema de Unidades. Factores Numéricos de Conversión. Ecuaciones Dimensionales. Física I. USMP. Ciclo 2016 - IGrecia Velásquez MalcaAún no hay calificaciones
- Tarea 5 SoluciónDocumento4 páginasTarea 5 SoluciónLuis Enrique Sanchez Mercado :DAún no hay calificaciones
- Proyecto FinalDocumento11 páginasProyecto FinalKarol HoyosAún no hay calificaciones
- Cuestionario ARTDocumento32 páginasCuestionario ARTMARCOS CAMILO LOPEZ MAMALLACTAAún no hay calificaciones
- Asig. #25, Mat I, Grupo #1, Ii-2021Documento11 páginasAsig. #25, Mat I, Grupo #1, Ii-2021SanDiego Motor PartsAún no hay calificaciones
- Optimizacion de 3 Reactores Tipo Tanque en MatlabDocumento3 páginasOptimizacion de 3 Reactores Tipo Tanque en MatlabRiki EGAún no hay calificaciones
- Tema 7 Materia 11-12Documento4 páginasTema 7 Materia 11-12Anonymous Wy6IvmAún no hay calificaciones
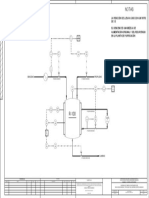
- P&id Reactor BencenoDocumento1 páginaP&id Reactor BencenoAxmel vlogsAún no hay calificaciones
- Actividad EvaporadoresDocumento16 páginasActividad EvaporadoresAnita Paz RodríguezAún no hay calificaciones
- Balance de MateriaDocumento23 páginasBalance de MateriaDaniel Moroco RiveraAún no hay calificaciones
- Actividad Chi - Cuadrada y T-StudentDocumento4 páginasActividad Chi - Cuadrada y T-StudentCamilo RuizAún no hay calificaciones
- Extra L-LDocumento18 páginasExtra L-LRenato RtzAún no hay calificaciones
- Guia 2 Parcial: Equilibrio Liquido VaporDocumento5 páginasGuia 2 Parcial: Equilibrio Liquido VaporRocio Andrea CasillaAún no hay calificaciones
- Tarea 5 - Oper UnitDocumento23 páginasTarea 5 - Oper UnitLuis MolloAún no hay calificaciones
- Reacciones Homogeneas Catalizadas y AutocatalizadasDocumento4 páginasReacciones Homogeneas Catalizadas y AutocatalizadasMarcos Condorí PacoAún no hay calificaciones
- Ejercicio 2.72Documento9 páginasEjercicio 2.72WILLIAMS CASTRO GUZMANAún no hay calificaciones
- Variables ComplejasDocumento4 páginasVariables ComplejasRocio RojasAún no hay calificaciones
- Unidad 10 FluidizaciónDocumento70 páginasUnidad 10 FluidizaciónGilberto MartínezAún no hay calificaciones
- PRQ 3219 Tema 8 PDFDocumento9 páginasPRQ 3219 Tema 8 PDFAle SuaznabarAún no hay calificaciones
- Eeym U2 A3 JaqmDocumento7 páginasEeym U2 A3 JaqmJavier Quintero MonsivaisAún no hay calificaciones
- Calculo de Tasa de Interés DesconocidasDocumento3 páginasCalculo de Tasa de Interés DesconocidasYORDY QUECAÑO QUISPEAún no hay calificaciones
- Pirolisis de Etano-Reformacion de MetanoDocumento4 páginasPirolisis de Etano-Reformacion de MetanoDUANE MADELEINE MONTERO MENDEZAún no hay calificaciones
- Reactor CSTR Saponificacion Grupo 5Documento27 páginasReactor CSTR Saponificacion Grupo 5rivaldoAún no hay calificaciones
- Calculos en El LaboratorioDocumento8 páginasCalculos en El LaboratorioMarito LacayoAún no hay calificaciones
- Métodos Numéricos NotasDocumento160 páginasMétodos Numéricos Notaspeloton10Aún no hay calificaciones
- Método de Newton ClaseDocumento6 páginasMétodo de Newton ClaseLupita MAún no hay calificaciones
- Problemas Resueltos de Factor de Fondo de Amortización en Series Uniformes A-F y Valor Presente en Series Uniformes A-PDocumento4 páginasProblemas Resueltos de Factor de Fondo de Amortización en Series Uniformes A-F y Valor Presente en Series Uniformes A-PJose Antonio Carreyo IIAún no hay calificaciones
- 3.superposicion de Dos Movimientos Armonicos SimplesDocumento8 páginas3.superposicion de Dos Movimientos Armonicos SimplesGissella VillaAún no hay calificaciones
- Brazo de ReinaDocumento10 páginasBrazo de ReinaSindy MuñozAún no hay calificaciones
- Laboratorio Virtual Ley de OhmDocumento3 páginasLaboratorio Virtual Ley de OhmwilsonherreraAún no hay calificaciones
- Procesos de Contacto ContinuoDocumento5 páginasProcesos de Contacto ContinuoLesly RodBelAún no hay calificaciones
- Exposicion Sensor Efecto CoriolisDocumento14 páginasExposicion Sensor Efecto CoriolisLuis Enrique PariapazaAún no hay calificaciones
- Taller Diseño de Reactores Preguntas ParesDocumento10 páginasTaller Diseño de Reactores Preguntas ParesCamilo PradaAún no hay calificaciones
- Problema 1.a-3.fenomenos de Transporte-BirdDocumento7 páginasProblema 1.a-3.fenomenos de Transporte-BirdYesenia NuGaAún no hay calificaciones
- DeberDocumento10 páginasDebererikaAún no hay calificaciones
- Experimento de Joule & Motores de CombustiónDocumento50 páginasExperimento de Joule & Motores de CombustiónBrando VistinAún no hay calificaciones
- Cap. 8 de Operaciones Unitarias en Ing. QuimicaDocumento4 páginasCap. 8 de Operaciones Unitarias en Ing. QuimicaMonica Harumi Torres GutierrezAún no hay calificaciones
- Tarea 1Documento6 páginasTarea 1Bento PlayerAún no hay calificaciones
- Distrib de Velocidad Flujo Laminar Sist Rectang Ejercicio 1 Distrib de Velocidad Flujo Laminar Sist Rectang Ejercicio 1Documento10 páginasDistrib de Velocidad Flujo Laminar Sist Rectang Ejercicio 1 Distrib de Velocidad Flujo Laminar Sist Rectang Ejercicio 1JesusAlbertoMizgerAún no hay calificaciones
- Qdoc - Tips Solucionario de Termodinamica CengelDocumento4 páginasQdoc - Tips Solucionario de Termodinamica CengelAngela RamirezAún no hay calificaciones
- Cuadro ComparativoDocumento8 páginasCuadro Comparativoleonel gonzalo bautista garciaAún no hay calificaciones
- Tabla Resumen de GeometriaDocumento2 páginasTabla Resumen de GeometriaBackdrag Sirius VargasAún no hay calificaciones
- PrimerParcial METROLOGIADocumento5 páginasPrimerParcial METROLOGIADILAN CONAHER SUY MIRANDAAún no hay calificaciones
- 1borrador Examen Final 020819PILAR CABILDO MIRANDADocumento17 páginas1borrador Examen Final 020819PILAR CABILDO MIRANDARicardo SierraAún no hay calificaciones
- Taller 3Documento4 páginasTaller 3Juan Castro FrancoAún no hay calificaciones
- Ecuaciones de Estado para Gases RealesDocumento25 páginasEcuaciones de Estado para Gases RealesKEVIN ARNOLDO PEREZ RIVASAún no hay calificaciones
- Rpe2 2Documento2 páginasRpe2 2Flores Manzo AranzazúAún no hay calificaciones
- Modelacion Dinamica de Sistemas de Control Unidad 2Documento20 páginasModelacion Dinamica de Sistemas de Control Unidad 2Fernando GarciaAún no hay calificaciones
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- Practica 4Documento7 páginasPractica 4PanchosucuAún no hay calificaciones
- Guia de Actividades y Rubrica de Evaluacion - Unidad 1 - Fase 2 - Identificacion de Variables Estadisticas PDFDocumento10 páginasGuia de Actividades y Rubrica de Evaluacion - Unidad 1 - Fase 2 - Identificacion de Variables Estadisticas PDFCarlos LòpezAún no hay calificaciones
- PrimeroDocumento2 páginasPrimeroShirosama HerreraAún no hay calificaciones
- 5 Pasos Iniciar Tu CybercafeDocumento46 páginas5 Pasos Iniciar Tu CybercafegennicsAún no hay calificaciones
- Seguridad SQLDocumento16 páginasSeguridad SQLManuel Pedro Lendínez EcheverríaAún no hay calificaciones
- Normas ISO 27KDocumento19 páginasNormas ISO 27KJavi JorAún no hay calificaciones
- Elementos y Equipos Utilizados en Los Sistemas de Automatización Industrial PDFDocumento148 páginasElementos y Equipos Utilizados en Los Sistemas de Automatización Industrial PDFDiego GuantayAún no hay calificaciones
- Laboratorio 24 de AbrilDocumento6 páginasLaboratorio 24 de AbrilBrayan JulianAún no hay calificaciones
- Entrega 1 Devision de ArquitecturaDocumento11 páginasEntrega 1 Devision de ArquitecturaKATTIA MIRELLA GONZALES OLIVERAAún no hay calificaciones
- Procesador de TextoDocumento3 páginasProcesador de TextoNoe BarriosAún no hay calificaciones
- Pid para PLC Micrlogix 1100 (Nov 14 - 2016)Documento8 páginasPid para PLC Micrlogix 1100 (Nov 14 - 2016)jesustarin557105100% (1)
- Semana de La Ingeniería ITM 2020Documento10 páginasSemana de La Ingeniería ITM 2020MARIA ISABEL QUINTERO HENAOAún no hay calificaciones
- Artículo Científico (Póster)Documento1 páginaArtículo Científico (Póster)nrr98pmv69Aún no hay calificaciones
- Unidad 2 Redes de ComputadorasDocumento16 páginasUnidad 2 Redes de ComputadorasDorian Ferreira GarciaAún no hay calificaciones
- Apaza Solon EnsamblajeDocumento4 páginasApaza Solon EnsamblajeAracely PerezAún no hay calificaciones
- Recuperar Archivos Borrados Desde Android.Documento5 páginasRecuperar Archivos Borrados Desde Android.Osber PinedaAún no hay calificaciones
- CV 2015 Junio Es ModeloDocumento5 páginasCV 2015 Junio Es ModeloIsmael DelgadoAún no hay calificaciones
- Tarea2 Alejandra RinconDocumento7 páginasTarea2 Alejandra RinconalejandraAún no hay calificaciones
- SEICDocumento8 páginasSEICacostaandresAún no hay calificaciones
- ManualDocumento33 páginasManualFatima CasanovaAún no hay calificaciones
- SM4154ES - 360 Vital Signs Management Solution - Sales BrochureDocumento5 páginasSM4154ES - 360 Vital Signs Management Solution - Sales BrochureLigday Stefani Rojas FlorezAún no hay calificaciones
- SPECTRA IV Series Dome Drive Manual EspDocumento100 páginasSPECTRA IV Series Dome Drive Manual EspKori Torres CarpioAún no hay calificaciones
- 5 Ga1 Aa3 Ev01 482554 Downloadable 4443201Documento6 páginas5 Ga1 Aa3 Ev01 482554 Downloadable 4443201include iostreamAún no hay calificaciones
- Apuntes273 - PARCIAL1 v.2Documento43 páginasApuntes273 - PARCIAL1 v.2Soto Cruz KevinAún no hay calificaciones
- Actividad 2. Monitorear Un Sensor LDRDocumento11 páginasActividad 2. Monitorear Un Sensor LDREnrique ChanAún no hay calificaciones
- Guía Rápida de Meet EstudiantesDocumento8 páginasGuía Rápida de Meet EstudiantesYolandaVergaraAún no hay calificaciones
- Historia de Redes de ComputoDocumento5 páginasHistoria de Redes de ComputoCarlos Enrique Zarate SuarezAún no hay calificaciones
- Guía de Instalación y Configuración de TACACS+ en LinuxDocumento7 páginasGuía de Instalación y Configuración de TACACS+ en LinuxLisbeth ErazoAún no hay calificaciones