También podría gustarte
- Fundamentos Teoría Máquinas. Simón, Bataller, Cabreara, Ezquerro, Guerra, Nadal, Ortiz 3 2009Documento257 páginasFundamentos Teoría Máquinas. Simón, Bataller, Cabreara, Ezquerro, Guerra, Nadal, Ortiz 3 2009berthing100% (10)
- Acero Herramientas 10Documento1 páginaAcero Herramientas 10berthingAún no hay calificaciones
- Instrumentación Planta Productora Café PUCPDocumento61 páginasInstrumentación Planta Productora Café PUCPberthingAún no hay calificaciones
- Acero para Herramientas2Documento1 páginaAcero para Herramientas2berthing0% (1)
- Acero Herramientas 9Documento1 páginaAcero Herramientas 9berthingAún no hay calificaciones
- Acero para Herramientas3Documento1 páginaAcero para Herramientas3berthingAún no hay calificaciones
- Acero para Herramientas 4Documento1 páginaAcero para Herramientas 4berthingAún no hay calificaciones
- Mantenimiento Máquinas. BAUTISTA, MUÑOZ, PEÑADocumento185 páginasMantenimiento Máquinas. BAUTISTA, MUÑOZ, PEÑAberthing100% (2)
- Vibraciones Mecánicas. ARTURO MACEDO SILVA 2014Documento148 páginasVibraciones Mecánicas. ARTURO MACEDO SILVA 2014berthing100% (2)
- Historia Perú. Berthing Gutiérrez BrenisDocumento21 páginasHistoria Perú. Berthing Gutiérrez BrenisberthingAún no hay calificaciones
- MS Project BJGBDocumento31 páginasMS Project BJGBberthingAún no hay calificaciones
- Bartender Capacitate para El EmpleoDocumento18 páginasBartender Capacitate para El Empleoberthing100% (1)
- Motores Combustión Interna Problemas Resueltos. HALVA - 95pgDocumento95 páginasMotores Combustión Interna Problemas Resueltos. HALVA - 95pgberthingAún no hay calificaciones
- Motores Combustión Interna UNI. GUIDO PINEDODocumento42 páginasMotores Combustión Interna UNI. GUIDO PINEDOberthing50% (2)
- Motores Combustión Interna UNI. GUIDO PINEDO - 42pgDocumento42 páginasMotores Combustión Interna UNI. GUIDO PINEDO - 42pgberthingAún no hay calificaciones
- Diseño Motores Combustión Interna. ARTURO MACEDO SILVADocumento41 páginasDiseño Motores Combustión Interna. ARTURO MACEDO SILVAberthing100% (3)
- Trabajo de MagnetoterapiaDocumento3 páginasTrabajo de MagnetoterapiaJulian VisentiniAún no hay calificaciones
- Tema 9 - Fisiopatología de La InmunidadDocumento7 páginasTema 9 - Fisiopatología de La InmunidadblancaAún no hay calificaciones
- Ajuste - 087 Abr18 Cap - Infografía U6 - Servidor Público 4Documento1 páginaAjuste - 087 Abr18 Cap - Infografía U6 - Servidor Público 4CLUB SUPER V.I.PAún no hay calificaciones
- Taqui y BradiarritmiasDocumento33 páginasTaqui y BradiarritmiasUrgencias HRS100% (1)
- Moniliasis VaginalDocumento3 páginasMoniliasis VaginalGlen FigueroaAún no hay calificaciones
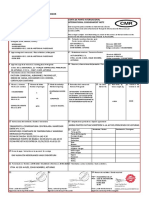
- Ejemplar para El Remitente / Copy For Sender Carta de Porte Internacional International Consignment NoteDocumento4 páginasEjemplar para El Remitente / Copy For Sender Carta de Porte Internacional International Consignment NoteAngel Garcia GarciaAún no hay calificaciones
- Primero Segundo y Tercero JunioDocumento4 páginasPrimero Segundo y Tercero JunioCecilia Villarroel MarinAún no hay calificaciones
- Las Ideas Esteticas de Paul ValeryDocumento14 páginasLas Ideas Esteticas de Paul ValeryWalter Andrés Páez Gaviria100% (1)
- Biologìa - SemilleroDocumento5 páginasBiologìa - SemilleroLUCIO TORRESAún no hay calificaciones
- Guia Laboratorio 1 Qgi-2018-2018Documento59 páginasGuia Laboratorio 1 Qgi-2018-2018Alejandro Mármol100% (1)
- Resumen Analitico Capitulo 10 Ciclos de Potencia de Vapor y CombinadosDocumento12 páginasResumen Analitico Capitulo 10 Ciclos de Potencia de Vapor y CombinadosSantiago BallesterosAún no hay calificaciones
- Guia Riego 2021Documento181 páginasGuia Riego 2021Cristian SegoviaAún no hay calificaciones
- LeibnizDocumento9 páginasLeibnizdani ramirezAún no hay calificaciones
- GlosarioDocumento3 páginasGlosarioyeimi castañedaAún no hay calificaciones
- Tubos de Descarga y Rayos Catódicos P3Documento2 páginasTubos de Descarga y Rayos Catódicos P3Genaro AbrahamAún no hay calificaciones
- Ecofor ServiciosDocumento4 páginasEcofor ServiciosFrancisco Javier AgüeroAún no hay calificaciones
- 21.T5.Electricidad y Magnetismo - CP 10Documento5 páginas21.T5.Electricidad y Magnetismo - CP 10david rodriguezAún no hay calificaciones
- Identifique El Tipo de Lenguaje Empleado y Anote El Nmero Que Correspond ADocumento3 páginasIdentifique El Tipo de Lenguaje Empleado y Anote El Nmero Que Correspond Amedea2mil2534Aún no hay calificaciones
- 78 Ajoblanco 36Documento68 páginas78 Ajoblanco 36PERE FERRAN ANDUGAR LOPEZAún no hay calificaciones
- Mapa MentalDocumento1 páginaMapa MentalGINNA GABRIELA RIOZEWSKY FERROAún no hay calificaciones
- Taller 1. Clei 3. Fisica. Ciencias NaturalesDocumento3 páginasTaller 1. Clei 3. Fisica. Ciencias Naturalessebastian rivero marinAún no hay calificaciones
- Informe ÉticaDocumento13 páginasInforme ÉticaJhovana Limachi ApazaAún no hay calificaciones
- 1-Preguntas - Tejido Sanguineo, Hematopoyesis y Medula OseaDocumento3 páginas1-Preguntas - Tejido Sanguineo, Hematopoyesis y Medula OseaYoel Yaret SoMa0% (1)
- Catalogo Proveedores 2019Documento93 páginasCatalogo Proveedores 2019atoulourAún no hay calificaciones
- Índice Biespectral Durante Craneotomías DormidasDocumento8 páginasÍndice Biespectral Durante Craneotomías DormidasAlexander AriasAún no hay calificaciones
- Examen. Mesoamérica.Documento6 páginasExamen. Mesoamérica.Mauricio CésarAún no hay calificaciones
- Seminario. Cáculo de Las NETDocumento4 páginasSeminario. Cáculo de Las NETPaulaAún no hay calificaciones
- Explotación de CanterasDocumento59 páginasExplotación de CanterasAlejandra OlarteAún no hay calificaciones
- Partes Del CuerpoDocumento3 páginasPartes Del CuerpoYorka Leon CiranoAún no hay calificaciones
- Cómo Cambiar Los Discos de Freno Traseros Del Ford Focus 2 DA DiéselDocumento27 páginasCómo Cambiar Los Discos de Freno Traseros Del Ford Focus 2 DA DiéselJosé Alberto Ramos RieraAún no hay calificaciones