También podría gustarte
- CI 1.1 Antiderivadas Mov RectDocumento6 páginasCI 1.1 Antiderivadas Mov RectUlises Ramos AJAún no hay calificaciones
- Practica #11Documento8 páginasPractica #11jocdavid1Aún no hay calificaciones
- Gravimetro Lacoste RombergDocumento4 páginasGravimetro Lacoste RombergLuis Alberto Heredia MorenoAún no hay calificaciones
- Diseño de La Sarta de Perforación DS1Documento152 páginasDiseño de La Sarta de Perforación DS1Ernesto de la CarcovaAún no hay calificaciones
- 3er C PARCIALDocumento2 páginas3er C PARCIALFer fasaAún no hay calificaciones
- Inductancia y AutoinduccionDocumento26 páginasInductancia y AutoinduccionVXIXAún no hay calificaciones
- Taller Recuperación Física 10° DécimoDocumento1 páginaTaller Recuperación Física 10° DécimoYuli Paola Sanjuan HernandezAún no hay calificaciones
- Articulo Biomecanica ESDocumento9 páginasArticulo Biomecanica ESGina GuerraAún no hay calificaciones
- BALANCEO ESTáTICODocumento4 páginasBALANCEO ESTáTICOHAROLD PADILLAAún no hay calificaciones
- Mezclas GaseosasDocumento5 páginasMezclas GaseosasJosue ReyesAún no hay calificaciones
- Orientación 2Documento24 páginasOrientación 2SaurumBlackAún no hay calificaciones
- Conclusion IntoduccionDocumento5 páginasConclusion IntoduccionLuis GalindoAún no hay calificaciones
- Solucion Examen Final 10210 Mecanica Upn Fludos1Documento7 páginasSolucion Examen Final 10210 Mecanica Upn Fludos1Juan Chilon B100% (1)
- Ley de HookeDocumento4 páginasLey de HookeJose GabrielAún no hay calificaciones
- Isaac Newton PDFDocumento14 páginasIsaac Newton PDFMarta de la Plaza GarciaAún no hay calificaciones
- Laboratorio #03 - PRINCIPIO DE BERNOULLIDocumento5 páginasLaboratorio #03 - PRINCIPIO DE BERNOULLIWilber IrrarazabalAún no hay calificaciones
- Teoria Cinetica MolecularDocumento2 páginasTeoria Cinetica Molecularsaul M.cAún no hay calificaciones
- Elasticidad y ResortesDocumento4 páginasElasticidad y Resortescarlos4146100% (1)
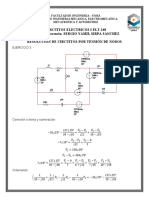
- Circuitos Electricos I Elt-240 Auxiliar de Docencia: SERGIO YAMIL SIRPA SANCHEZ Resolución de Circuitos Por Tensión de NodosDocumento3 páginasCircuitos Electricos I Elt-240 Auxiliar de Docencia: SERGIO YAMIL SIRPA SANCHEZ Resolución de Circuitos Por Tensión de NodosCristian Rodrigo Candia QuisbertAún no hay calificaciones
- Sistema de Masa VariableDocumento5 páginasSistema de Masa VariableAbdiel Isai Castro RamirezAún no hay calificaciones
- 03-Fabricación de Un MotorDocumento10 páginas03-Fabricación de Un Motorfreddy da silvaAún no hay calificaciones
- TEMA-30 Fuerza, Trabajo, Potencia y EnergíaDocumento50 páginasTEMA-30 Fuerza, Trabajo, Potencia y Energíayolanda100% (2)
- Fisica Trabajo EncargadoDocumento9 páginasFisica Trabajo Encargadolk.quitoguAún no hay calificaciones
- Calculo Momento de InerciaDocumento12 páginasCalculo Momento de InerciavaleriaAún no hay calificaciones
- Luis Velasquez Intercambiadores de CalorDocumento17 páginasLuis Velasquez Intercambiadores de CalorNex Saifer100% (1)
- Lab 11 Experimento de Davisson GermerDocumento4 páginasLab 11 Experimento de Davisson GermerSebastian Effio EspinozaAún no hay calificaciones
- 3era - Tarea Dep. Fisica I. Mayo 2017Documento3 páginas3era - Tarea Dep. Fisica I. Mayo 2017Jovanny ReynaAún no hay calificaciones
- Elementos Sujetos A Carga AxialDocumento49 páginasElementos Sujetos A Carga AxialCarballo HndzAún no hay calificaciones
- Curso Puente Trasero Camiones Transporte Volvo PDFDocumento23 páginasCurso Puente Trasero Camiones Transporte Volvo PDFSQ Yosbd100% (1)
- Lineas de Campo Magnetico y Flujo Magnético PDFDocumento7 páginasLineas de Campo Magnetico y Flujo Magnético PDFRoger CubasAún no hay calificaciones