Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Control AMRLevitacionmagnetica Rev UC5
Control AMRLevitacionmagnetica Rev UC5
Cargado por
Rey GussyTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Control AMRLevitacionmagnetica Rev UC5
Control AMRLevitacionmagnetica Rev UC5
Cargado por
Rey GussyCopyright:
Formatos disponibles
Control de un sistema de levitación magnética
resultando la siguiente ecuación característica: da posible. Finalmente, el compensador para el siste-
ma de levitación se expresa como una función de
( s 2 − 1000)( s + 50) = 0 (25) transferencia de la forma:
89 (s + 25)
Los polos del sistema están ubicados en Gc (s) = − (26)
s1 = 31.6228, s2 = –31.6228, s3 = – 50. Se observa que (s + 300)
hay un polo en el semiplano derecho del plano de la
frecuencia compleja s = σ + jω. De esto se deduce que LUGAR DE LAS RAICES
el sistema de levitación es inestable. Como paso ini- 100
cial para tratar de obtener un sistema de levitación
estable se graficó el lugar de las raíces del sistema en
lazo cerrado teniendo como salida la posición del ob- 50
jeto levitado. Ahora la entrada del sistema es el valor POLOS DE LAZO CERRADO
de referencia de la posición deseada. En la Figura 2 se
EJE IMAGINARIO
muestra el lugar de la raíces. Se observa que no existe 0
un valor de la ganancia K en la cual el sistema en lazo
cerrado sea estable. Por esta razón es necesario agre- -50
gar un compensador de manera que exista un rango de
la ganancia K donde el sistema de lazo cerrado sea
estable. -100
-80 -60 -40 -20 0 20 40 60
LUGAR DE LAS RAICES EJE REAL
100
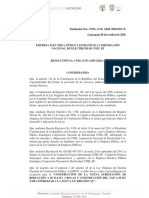
Figura 3. Lugar de las raíces del sistema de levitación
80
60 compensado.
40
5. CONTROL ADAPTATIVO POR
20
MODELO DE REFERENCIA
EJE IMAGINARIO
-20
Hay dos procedimientos generales de control
adaptativo. El primero dispone de un “mecanismo de
-40
adaptación” el cual observa las señales del sistema y
-60 adapta los parámetros del controlador para mantener
-80
el desempeño, incluso si ocurren cambios en los pará-
metros de la planta. El desempeño deseado se caracte-
-100
-140 -120 -100 -80 -60 -40 -20 0 20 40 60 riza con un “modelo de referencia” y el controlador
EJE REAL
procura hacer que el sistema de lazo cerrado se com-
porte como el modelo de referencia, incluso si la plan-
Figura 2. Lugar de las raíces del sistema de levitación no
ta cambia. En el segundo enfoque general se utiliza un
compensado.
método de identificación on-line para estimar los pa-
Se diseñó un compensador con un cero en rámetros de la planta y un “módulo de ajuste del con-
s = –25 y un polo en s = –300 con la finalidad de mo- trolador” para especificar los parámetros del controla-
ver los polos del sistema de lazo cerrado y éstos se dor. Si los parámetros de la planta cambian, la identi-
ubicaron como se muestra en la Figura 3. Para esta ficación proporcionará las estimaciones de estos y el
ubicación de los polos del sistema de levitación en “módulo de ajuste” afinará al controlador [11, 12].
lazo cerrado el valor de la ganancia del compensador
es Kc = -89. El control adaptativo por modelo de referencia
(Model Reference Adaptive Control, MRAC) fue pro-
El valor de la ganancia Kc se escogió tratando puesto por investigadores del MIT en 1958 al estudiar
de obtener el menor sobreimpulso máximo de la res- los servomecanismos con ganancia variable [14]. El
puesta al escalón unitario y una respuesta lo más rápi- método MRAC se basa en un concepto muy simple:
se desea que el comportamiento del proceso sea
10 Rev. INGENIERÍA UC. Vol. 14, No 2, Agosto 2007
Picón y De La Cruz
“idéntico” al de un modelo que se da como referencia. donde γ, o ganancia de adaptación, determina la velo-
Si existe diferencia entre las salidas del proceso y del cidad de adaptación del controlador y ∂e/∂t es la sen-
modelo un mecanismo de adaptación intenta minimi- sibilidad derivativa, es decir, la sensibilidad del error
zarla ajustando los parámetros del controlador, o aña- con respecto a los parámetros θ.
diendo una variación en la acción sobre el sistema
físico. La Figura 4 muestra el diagrama clásico de 5.1 Adaptación de la ganancia de lazo directo
MRAC.
ym(t) Asumiendo que la función de transferencia de
Modelo de Referencia
la planta o proceso del sistema a controlar está dada
Error por KG(s) donde G(s) es conocida y K es un paráme-
e(t) tro desconocido, la idea del diseño consiste en un con-
Mecanismo
trolador realimentado tal que la función de transferen-
de cia del modelo sea Gm(s) = K0 G(s) , donde K0 es una
Parametros ajuste
del controlador constante deseada. Con el controlador realimentado
Señal de
referencia Señal de expresado por la ecuación:
r(t) Control
CONTROLADOR PLANTA
u(t) Salida
y(t) u = θ u c (30)
Figura 4. Diagrama de bloques clásico del MRAC. Donde u es la señal de salida del controlador y
uc es la señal de comando, la función de transferencia
El controlador puede ajustarse a través de dos entre la salida y la señal de comando es θ K G(s). Esta
lazos: un lazo de realimentación para la compensación función de transferencia es igual a Gm(s) si el paráme-
de la planta o el proceso y el otro lazo para ajustar los tro θ se escoge tal que:
parámetros del controlador de forma tal que el error
K0
e(t) sea lo más pequeño posible, donde e(t) está defi- θ = (31)
nido como la diferencia entre la salida de la planta a K
controlar y(t) y la salida del modelo de referencia ym
(t), o sea: Aplicando la regla MIT donde K es ahora cono-
cida, el error es:
e (t ) = y (t ) − y m (t ) (27)
e = y − y m = KG ( p )θ u c − K 0 G ( p )θ u c (32)
El mecanismo de ajuste de los parámetros se
denomina “regla MIT” [11]. Para esto se busca mini- Donde uc es la señal de comando, ym es la salida
mizar la función de costo J(θ) expresada como el error del modelo, y es la salida de la planta, θ es el paráme-
cuadrático medio: tro ajustable y p es el operador diferencial d/dt .
1 2 1 La sensibilidad derivativa está dada por:
(y )
2
J (θ ) = e = − ym (28)
2 2
∂e K
= K G ( p )u c = ym (33)
Donde e es el error definido en la ecuación (27) ∂θ K0
y θ representa los parámetros del controlador. Existen
diferentes formas de ajustar los parámetros de forma Ahora la regla MIT estará dada por la siguiente
tal que se minimice J. Una manera de hacerlo es por ley de adaptación:
el método descendente del gradiente donde el cambio
dθ K
en los parámetros dθ/dt se realiza en la dirección del = −γ ′ y m e = −γ y m e (34)
gradiente negativo de J, esto es: dt K0
dθ ∂J ∂e El diagrama de bloques de la implementación
= −γ = −γ e (29) del sistema para una planta G(s) se muestra en la Fi-
dt ∂θ ∂θ
gura 5. La función de transferencia G(s) debe ser esta-
Rev. INGENIERÍA UC. Vol. 14, No 2, Agosto 2007 11
Control de un sistema de levitación magnética
ble, por lo tanto, en el caso de este estudio, correspon- Finalmente, se simuló el sistema MRAC, usan-
de al sistema de levitación compensado. Este diagra- do todos los subsistemas antes mencionados, es decir,
ma se usará como referencia para la simulación usan- el sistema de levitación linealizado, el compensador y
do el software Matlab. el modelo de referencia, siguiendo el esquema dado
en la Figura 5. Se modificó el valor del parámetro γ y
Modelo se obtuvieron las respuestas mostradas en la Figura 7.
K 0G ( s ) ym
EFECTO DEL PARAMETRO γ EN LA RESPUESTA DEL SISTEMA
3
- 2.5
γ e
− Π ∑
s
+ 2
θ
Proceso
SALIDA
uc u y 1.5
Π KG ( s )
1
Figura 5. Diagrama de bloque de un MRAS con γ = 0.144
γ = 0.2
ajuste de la ganancia. 0.5 γ = 0.1
0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
TIEMPO
La idea principal del control por modelo refe-
rencia es que si la salida de la planta que se desea con-
trolar presenta variabilidad por la dinámica interna de Figura 7. Influencia del parámetro en la
la planta o porque se le suman señales no deseadas a respuesta del sistema.
la señal de medición de la variable controlada, enton-
ces los parámetros de la planta se adapten de manera Seleccionando un valor de γ = 0.144, en la Fi-
que la salida siga la respuesta del modelo de referen- gura 8 se muestran las gráficas de la respuesta al esca-
cia. lón unitario tanto de la planta controlada por modelo
de referencia y del sistema seleccionado como modelo
Una ventaja importante en este tipo de control de referencia. En esta se observa cómo la respuesta de
se manifiesta en la aplicación dada en este trabajo, la planta sigue a la salida del modelo de referencia
debido a que la planta que se utilizará es tipo cero y eliminando el error en estado estacionario.
por razones de estabilidad del sistema en lazo cerrado
no es posible aplicar un controlador que agregue una Finalmente, se experimentó aplicando una señal
acción integral. Con el control por modelo de referen- con variación sinusoidal al sistema con control adap-
cia es posible anular el error en estado estacionario sin tativo MRAC para determinar si el sistema es capaz
agregar un controlador con acción integral. de mantener esta dinámica. En la Figura 9 se muestra
el resultado obtenido.
6. SIMULACIÓN DEL SISTEMA RESPUESTA DEL SISTEMA A UNA ENTRADA ESCALON
4
CON MRAC Levitador
Referencia
3.5 Modelo ref
Para completar el esquema MRAC se seleccio- 3
nó como modelo referencia un sistema realimentado 2.5
de segundo orden tipo 1 cuyo diagrama de bloque se
AMPLITUD
2
muestra en la Figura 6. Este modelo posee un error en
1.5
estado estacionario cero para una entrada escalón.
1
uc 100 yc
+ 0.5
– s ( s + 5) 0
0 0.5 1 1.5 2 2.5
TIEMPO
3 3.5 4 4.5 5
Figura 8. Respuestas al escalón unitario del sistema con
Figura 6. Modelo de referencia. MRAC.
12 Rev. INGENIERÍA UC. Vol. 14, No 2, Agosto 2007
Picón y De La Cruz
RESPUESTA DEL SISTEMA A UNA ENTRADA SINUSOIDAL [5] Airea G., Acosta M.,Bartesaghi R., Canetti R.
3
Levitador (1997) “Levitador Magnético: Un Prototipo
Referencia
2.5
Modelo ref Experimental para la enseñanza y la Investiga-
ción en el Área del Control Automático”. XVII
2 Jornadas de Ingeniería Eléctrica y Electrónica.
Escuela Politécnica Nacional, Quito, Ecuador.
AMPLITUD
1.5
[6] Palmieri D., Pucci M. (2004). “Construcción de
1
un Sistema de Levitación Magnética para Labo-
0.5 ratorio Controlado por PC en Tiempo Real”.
Proyecto de fin de carrera. IACI, Universidad
0
0 5 10 15 20 25 30
Nacional de Quilmas. Argentina.
TIEMPO
[7] Arteaga F., Morillo A., Obediente L. (2003).
Figura 9. Respuesta del sistema con MRAC a una
“Estabilización de un sistema de suspensión
entrada sinusoidal.
magnética aplicando una forma canónica
Hamiltoniana de pasividad y linealización exac-
7. CONCLUSIONES
ta por realimentación”. Revista INGENIERIA
UC. Vol. 10, No. 3, 50-58.
A pesar de la aparente complejidad del esque-
ma MRAC su realización es bastante sencilla. Los
[8] Al-Muthairi N.F. and Zribi M. (2004). “Sliding
resultados obtenidos son completamente satisfactorios
Mode Control of a Magnetic Levitation Sys-
al obtenerse una respuesta sin sobreimpulso y con un
tem”. Mathematical Problems in Engineering
adecuado tiempo de asentamiento, además de eliminar
Vol. 2, 93–107.
el error de estado estacionario sin el empleo directo de
un controlador con acción integral. Es notable que el
[9] Hassan I. and Mohamed A. (2001). “Variable
sistema con MRAC sea capaz de seguir la dinámica
Structure Control of a Magnetic Levitation Sys-
de una entrada sinusoidal. La siguiente etapa contem-
tem”. Proceedings of the American Control
plada para la continuación de esta investigación es la
Conference. Arlington, VA.
realización física del sistema de levitación y del con-
trolador.
[10] Lin, J–L. and Tho B–C. (1998). “Analysis and
µ-Based Controller Design for an Electromag-
8. REFERENCIAS
netic Suspension System”. IEEE Transactions
on Education, Vol. 41, No. 2, 116–129.
[1] Wong, T. H. (1986). “Design of a magnetic
levitation control system: an undergraduate pro-
[11] K.J. Åström, and B. Wittenmark. (1995).
ject. IEEE Transactions on Education”, Vol. 29,
“Adaptive Control: Second Edition. Reading”,
196-200.
MA: Addison-Wesley.
[2] Hurley, W. G. and Wölfle, W. (1997).
[12] Slotine J.-J. E., Li, W. (1991). “Applied
“Electromagnetic Design of a Magnetic Sus-
Nonlinear Control”. Prentice-Hall Inc.
pension System”, IEEE Trans. On Education,
Vol. 40, No. 2, 124-130.
[13] Ogata, K. (2003). “Ingeniería de Control Mo-
derna”. Pearson Educación, S. A. Madrid.
[3] Shiao, Y. S. (2001). “Design and Implementa-
tion of a Controller for a Magnetic Levitation
[14] H.P. Whitaker, J. Yamron, and A. Kezer.
System”. Proc. Natl. Sci. Counc. ROC(D) Vol.
(1958). “Design of model reference adaptive
11, No. 2. 88-94.
control systems for aircraft”. Instrumentation
Laboratory, M.I.T.
[4] Golob M, Tovornik B. (2003). “Modeling and
control of the magnetic suspension system”.
ISA Trans. Jan. Vol. 42, No. 1, 89-100.
Rev. INGENIERÍA UC. Vol. 14, No 2, Agosto 2007 13
View publication stats
También podría gustarte
- Tarea 2 Control AnalogoDocumento22 páginasTarea 2 Control Analogoerick DHoz100% (1)
- Cnel Ste DC 2020 0321 oDocumento2 páginasCnel Ste DC 2020 0321 oRey GussyAún no hay calificaciones
- Cnel Ste DD 2020 1734 MDocumento53 páginasCnel Ste DD 2020 1734 MRey GussyAún no hay calificaciones
- Documento Electrico 3Documento4 páginasDocumento Electrico 3Rey GussyAún no hay calificaciones
- Informe Electrico 5Documento7 páginasInforme Electrico 5Rey GussyAún no hay calificaciones
- Informe Electrico 2Documento4 páginasInforme Electrico 2Rey GussyAún no hay calificaciones
- Documento Electrico 4Documento4 páginasDocumento Electrico 4Rey GussyAún no hay calificaciones
- HDTG Transformadores Monofásicos Padmounted 1Documento3 páginasHDTG Transformadores Monofásicos Padmounted 1Rey GussyAún no hay calificaciones
- 01 MM Daniel y Sus AmigosDocumento13 páginas01 MM Daniel y Sus AmigosRey GussyAún no hay calificaciones
- G1. Geometria GeneralDocumento24 páginasG1. Geometria GeneralRey GussyAún no hay calificaciones
- Análisis DinámicoDocumento26 páginasAnálisis Dinámicoluis barriosAún no hay calificaciones
- Practica 4Documento6 páginasPractica 4paula rodriguez carreroAún no hay calificaciones
- Analisis Por Metodos Convencionales - 2Documento26 páginasAnalisis Por Metodos Convencionales - 2JHONATAN ENRIQUEZ ENRIQUEZ SAAVEDRAAún no hay calificaciones
- Definicion Del Lugar de Las Raices y Sus PropiedadesDocumento10 páginasDefinicion Del Lugar de Las Raices y Sus PropiedadesCristóbal S. FloresAún no hay calificaciones
- Practica 8 Lab de Control 1Documento7 páginasPractica 8 Lab de Control 1Carlos J Duran ForeAún no hay calificaciones
- Lugar de RaicesDocumento28 páginasLugar de RaicesKarlos Antonio Salinas MoralesAún no hay calificaciones
- Lugar Geométrico de Las Raíces (LGR)Documento16 páginasLugar Geométrico de Las Raíces (LGR)Jose Juan MoralesAún no hay calificaciones
- Practica de Matlab Diseño de Controladores UmssDocumento14 páginasPractica de Matlab Diseño de Controladores UmssmarrAún no hay calificaciones
- Fundamentos de Automatica ETSIIDocumento52 páginasFundamentos de Automatica ETSIItheoqAún no hay calificaciones
- Scilab Programacion y SimulacionDocumento9 páginasScilab Programacion y Simulaciondibujantecad0% (1)
- Práctica 1Documento4 páginasPráctica 1moisesAún no hay calificaciones
- Reglas Del Lugar de Las RaicesDocumento14 páginasReglas Del Lugar de Las RaicesAthziri Rodriguez OteroAún no hay calificaciones
- Sanchez MorochoDocumento18 páginasSanchez MorochoWilson MorochoAún no hay calificaciones
- IC Laboratorio8Documento5 páginasIC Laboratorio8Dámaris NoahAún no hay calificaciones
- Unidad 5Documento4 páginasUnidad 5MENDOZA_92Aún no hay calificaciones
- 13 LGR Metodo GraficarDocumento25 páginas13 LGR Metodo GraficarZkeiik Zaloo AlarconAún no hay calificaciones
- Curso de Control Con MATLABlDocumento71 páginasCurso de Control Con MATLABlDILBER OCTAVIO PERALTA SUAREZAún no hay calificaciones
- Matlab PDFDocumento41 páginasMatlab PDFleruriAún no hay calificaciones
- Relgas de EvansDocumento7 páginasRelgas de Evansfernando herreraAún no hay calificaciones
- Resumen ControlDocumento11 páginasResumen ControlalexAún no hay calificaciones
- Practica 5 LGRDocumento6 páginasPractica 5 LGRMarco Jonathan Ponce BernalAún no hay calificaciones
- Control 2.7 y 2.8Documento11 páginasControl 2.7 y 2.8jovanny garciaAún no hay calificaciones
- Control ToolboxDocumento53 páginasControl ToolboxLucas EmanuelAún no hay calificaciones
- Compensandores en Adelanto y RetrasoDocumento3 páginasCompensandores en Adelanto y RetrasoAntonio SalazarAún no hay calificaciones
- Ejemplo 1Documento18 páginasEjemplo 1Eliseo Ccanto de la CruzAún no hay calificaciones
- Lugar de Las Raices Alumnos PDFDocumento44 páginasLugar de Las Raices Alumnos PDFEdgar EduardoAún no hay calificaciones
- CTM Ejemplo - Lugar de Raíces Control Del Modelo Del Péndulo Invertido PDFDocumento12 páginasCTM Ejemplo - Lugar de Raíces Control Del Modelo Del Péndulo Invertido PDFWilson Barco MAún no hay calificaciones
- Cancelacion de Los PolosDocumento7 páginasCancelacion de Los PolosAlbert Ferrari ArcuriAún no hay calificaciones