También podría gustarte
- 1° Trigonometria - Megarepaso - RalejoDocumento1 página1° Trigonometria - Megarepaso - RalejoAlonso MarceloAún no hay calificaciones
- La ElipseDocumento10 páginasLa ElipseRafael EspinozaAún no hay calificaciones
- CURVASDocumento39 páginasCURVASIgnacio Chi Chuc100% (1)
- Cuerpo RedondoDocumento8 páginasCuerpo RedondoEliana CogolloAún no hay calificaciones
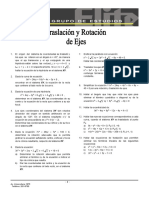
- Tras y Rot EjesDocumento1 páginaTras y Rot EjesWilfredo ReynosoAún no hay calificaciones
- Tarea Mate Aplicación MultivariableDocumento26 páginasTarea Mate Aplicación MultivariableJuan Diego Castro ArevaloAún no hay calificaciones
- 11 RC TALLER No 1 DE GEOMETRIA CIRCUNFERENCIA PARABOLADocumento3 páginas11 RC TALLER No 1 DE GEOMETRIA CIRCUNFERENCIA PARABOLAJohan David SaboyaAún no hay calificaciones
- 5 Reparametrizacion de Una CurvaDocumento12 páginas5 Reparametrizacion de Una CurvaSharon ChristensenAún no hay calificaciones
- I Sistema de CoordenadasDocumento8 páginasI Sistema de Coordenadasmcd.construccionesdimAún no hay calificaciones
- 01 Repaso Geometria AnaliticaDocumento11 páginas01 Repaso Geometria AnaliticaCedrick perezAún no hay calificaciones
- La RectaDocumento7 páginasLa RectavictorAún no hay calificaciones
- 3.1 Plano Cartesiano, Distancia, Punto Medio PDFDocumento7 páginas3.1 Plano Cartesiano, Distancia, Punto Medio PDFsusan lazoAún no hay calificaciones
- Deriv e IntDocumento6 páginasDeriv e IntJoveAún no hay calificaciones
- 1 - Diseño Geométrico Horizontal - Curvas CircularesDocumento43 páginas1 - Diseño Geométrico Horizontal - Curvas CircularesDaniel Doria DoriaAún no hay calificaciones
- Curvas Circulares HorizontalesDocumento17 páginasCurvas Circulares HorizontalesYenifer GomezAún no hay calificaciones
- Polar EsDocumento3 páginasPolar Eschucky ozAún no hay calificaciones
- Semana 1-Sector CircularDocumento5 páginasSemana 1-Sector CircularAlexandro MPAún no hay calificaciones
- Ejercicios de ConicasDocumento5 páginasEjercicios de ConicasOswaldo Daniel Veliz MaciasAún no hay calificaciones
- Metodo de KinchDocumento11 páginasMetodo de Kinchdany condori crispinAún no hay calificaciones
- Proyecto Especial de Astro Segundo ParcialDocumento15 páginasProyecto Especial de Astro Segundo ParcialSergio Rojo SujoAún no hay calificaciones
- Informe de Perforación II-1Documento9 páginasInforme de Perforación II-1Kenia Rojas RodriguezAún no hay calificaciones
- Tema 35.desarrollos CaldereriaDocumento32 páginasTema 35.desarrollos CaldereriamanuelAún no hay calificaciones
- Construcción de ElipsesDocumento5 páginasConstrucción de ElipsesJosch Salcedo CardenasAún no hay calificaciones
- Tarea 2 Grupa 16Documento13 páginasTarea 2 Grupa 16Miguel JiménezAún no hay calificaciones
- Trigonometria - 21 - Transform de Coordenadas - Rotación - Ecuación de 2do GradoDocumento4 páginasTrigonometria - 21 - Transform de Coordenadas - Rotación - Ecuación de 2do Gradobritney manco100% (1)
- U2 VectorialDocumento5 páginasU2 VectorialKevin AnzaAún no hay calificaciones
- Conceptos de Las CónicasDocumento6 páginasConceptos de Las CónicasJosé martinezAún no hay calificaciones
- Coordenadas Cilíndricas y Esféricas Grupo 4 CalculoDocumento13 páginasCoordenadas Cilíndricas y Esféricas Grupo 4 Calculoandreita gafaroAún no hay calificaciones
- Oe Mat 5Documento4 páginasOe Mat 5Jorge CasaAún no hay calificaciones
- Ecuaciones de Los Ejes de Coordenadas PDFDocumento2 páginasEcuaciones de Los Ejes de Coordenadas PDFCamila OrtizAún no hay calificaciones