También podría gustarte
- Diseno Hidraulico Obras de Toma 125-215-1-SMDocumento8 páginasDiseno Hidraulico Obras de Toma 125-215-1-SMEmmanuel MejiaAún no hay calificaciones
- Lista de Cantidades Proyecto CardonDocumento8 páginasLista de Cantidades Proyecto CardonEmmanuel MejiaAún no hay calificaciones
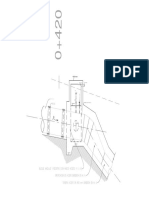
- Cámara Acceso 0+420-Model 1Documento1 páginaCámara Acceso 0+420-Model 1Emmanuel MejiaAún no hay calificaciones
- Unidad 2Documento31 páginasUnidad 2Emmanuel MejiaAún no hay calificaciones
- Lista de Cantidades CorregidasDocumento3 páginasLista de Cantidades CorregidasEmmanuel MejiaAún no hay calificaciones
- 03 29 2021 R7 DDH Vald TunelDocumento15 páginas03 29 2021 R7 DDH Vald TunelEmmanuel MejiaAún no hay calificaciones
- Puntos Las BariasDocumento5 páginasPuntos Las BariasEmmanuel MejiaAún no hay calificaciones
- 10-04-2019 Detalles AceroDocumento13 páginas10-04-2019 Detalles AceroEmmanuel MejiaAún no hay calificaciones
- Falconbridge-EM-Secadero 3-Memoria CalculoDocumento67 páginasFalconbridge-EM-Secadero 3-Memoria CalculoEmmanuel MejiaAún no hay calificaciones
- Proyecto de Tesis Mod - 1Documento51 páginasProyecto de Tesis Mod - 1Emmanuel MejiaAún no hay calificaciones
- Dimensionamiento de Las Correas TransportadorasDocumento1 páginaDimensionamiento de Las Correas TransportadorasEmmanuel MejiaAún no hay calificaciones
- Longitudes Desarrollo y Empalmes Astm-A-615Documento14 páginasLongitudes Desarrollo y Empalmes Astm-A-615Emmanuel MejiaAún no hay calificaciones
- UNIDAD 9 Fuentes de Invalidez. Internas y ExternasDocumento33 páginasUNIDAD 9 Fuentes de Invalidez. Internas y ExternasEmmanuel Mejia100% (1)
- 1 Tecnicasapprox 161107210132Documento40 páginas1 Tecnicasapprox 161107210132Emmanuel MejiaAún no hay calificaciones
- Unidad 2Documento7 páginasUnidad 2Emmanuel MejiaAún no hay calificaciones
- Unidad 1Documento48 páginasUnidad 1Emmanuel MejiaAún no hay calificaciones
- CERCONS-EI-DP-143-2020 Área Industrial-Secciones Cortes y Relleno, Drenaje Pluvial y DetallesDocumento2 páginasCERCONS-EI-DP-143-2020 Área Industrial-Secciones Cortes y Relleno, Drenaje Pluvial y DetallesEmmanuel MejiaAún no hay calificaciones
- Elementos FinitosDocumento5 páginasElementos FinitosEmmanuel MejiaAún no hay calificaciones
- Elementos FinitosDocumento5 páginasElementos FinitosEmmanuel MejiaAún no hay calificaciones
- UNIDAD 10 Estrategias y Métodos de InvestigacionDocumento18 páginasUNIDAD 10 Estrategias y Métodos de InvestigacionEmmanuel MejiaAún no hay calificaciones
- UNIDAD 7 Diseños Transversales, Tipos de DiseñoDocumento17 páginasUNIDAD 7 Diseños Transversales, Tipos de DiseñoEmmanuel MejiaAún no hay calificaciones
- 03 Números Reales Nota de ClaseDocumento186 páginas03 Números Reales Nota de ClaseRicardo EmilioAún no hay calificaciones
- M Todos Matem Ticos e ADocumento42 páginasM Todos Matem Ticos e Afabricio2167Aún no hay calificaciones
- AlgebraDocumento3 páginasAlgebrajessieAún no hay calificaciones
- 2 Raz - Matemàtico PRDocumento4 páginas2 Raz - Matemàtico PRNelson Adrian Mantilla AraujoAún no hay calificaciones
- Apunte de DerivadasDocumento28 páginasApunte de DerivadasEmma NuelAún no hay calificaciones
- Teoria de Conjuntos y Subconjuntos Presentacion Inicial Con 10 EjerciciosDocumento35 páginasTeoria de Conjuntos y Subconjuntos Presentacion Inicial Con 10 EjerciciosAtres GonAún no hay calificaciones
- David Saavedra Ejercicios 1.1 Topología General 2020-2Documento4 páginasDavid Saavedra Ejercicios 1.1 Topología General 2020-2BaphodeathAún no hay calificaciones
- Investigación Aproximación Lineal y DiferencialDocumento5 páginasInvestigación Aproximación Lineal y DiferencialbellAún no hay calificaciones
- Actividad Regresión Polinomial - ARMDocumento5 páginasActividad Regresión Polinomial - ARMArmando Miguel Tapia MezaAún no hay calificaciones
- Unidad 4Documento12 páginasUnidad 4Don CarloAún no hay calificaciones
- ANÁLISIS COMBINATORIO Y PROBABILIDAD ThaliaDocumento8 páginasANÁLISIS COMBINATORIO Y PROBABILIDAD ThaliaThalia AlbitresAún no hay calificaciones
- Fracciones 13 de MayoDocumento7 páginasFracciones 13 de MayoANGEL CORDOVAAún no hay calificaciones
- Temario DCI - 2020-2Documento2 páginasTemario DCI - 2020-2Manuel GarcíaAún no hay calificaciones
- Exposición InterpolaciónDocumento31 páginasExposición InterpolaciónNataly Diaz MeyerAún no hay calificaciones
- MATEMÁTICAS TERCER TRIMESTRE 3er. GRADODocumento2 páginasMATEMÁTICAS TERCER TRIMESTRE 3er. GRADOVictor Hugo Zavala LopezAún no hay calificaciones
- Inducción T05Documento8 páginasInducción T05Diego MurilloAún no hay calificaciones
- Libro Dibujo de Ingenieria-Capitulo5-IndesingDocumento20 páginasLibro Dibujo de Ingenieria-Capitulo5-Indesinguracan 322Aún no hay calificaciones
- Ecuaciones IIDocumento2 páginasEcuaciones IIAlejandro MamaniAún no hay calificaciones
- Funcion LinealDocumento3 páginasFuncion Linealjulio gallardo funesAún no hay calificaciones
- MATRICES y DETERMINANTESDocumento34 páginasMATRICES y DETERMINANTESOscarAún no hay calificaciones
- Apendice B - Ecuación de La RectaAgosto2014Documento4 páginasApendice B - Ecuación de La RectaAgosto2014MiguelRoblesAún no hay calificaciones
- Contenido CientificoDocumento32 páginasContenido CientificoMirtha FloresAún no hay calificaciones
- Práctica Calificada - Zapata Mundaca Gerson AngelDocumento3 páginasPráctica Calificada - Zapata Mundaca Gerson AngelJhon Rander Arana RojasAún no hay calificaciones
- Guia de Aprrndizaje Semana 2 Recuperacion Matematica 3°-IDocumento3 páginasGuia de Aprrndizaje Semana 2 Recuperacion Matematica 3°-ILizabel Clara Yupanqui ReyesAún no hay calificaciones
- Cifras SignificativasDocumento3 páginasCifras SignificativasLauriza Giraldo HuamanAún no hay calificaciones
- NullDocumento3 páginasNullSheyla Gomez RojasAún no hay calificaciones
- Ejemplo 4.1-2-BirdDocumento9 páginasEjemplo 4.1-2-BirdMoisés MedinaAún no hay calificaciones
- Cap 1 Relaciones Parte 3Documento10 páginasCap 1 Relaciones Parte 3gustavoAún no hay calificaciones
- 6 DE LAGRANGE Y CLAIROUTS 66 Nuev Num PDFDocumento6 páginas6 DE LAGRANGE Y CLAIROUTS 66 Nuev Num PDFEd Obito Loayza AduviriAún no hay calificaciones