También podría gustarte
- Mina Los Rosales: Ubicación, historia y proceso de extracción mineral en Puno, PerúDocumento5 páginasMina Los Rosales: Ubicación, historia y proceso de extracción mineral en Puno, PerúJhoel Quispe TiconaAún no hay calificaciones
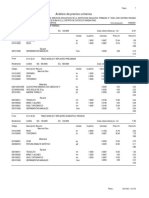
- Análisis de precios unitarios para mejora de servicios educativosDocumento6 páginasAnálisis de precios unitarios para mejora de servicios educativosJhoel Quispe TiconaAún no hay calificaciones
- 4.2.1 Relacion de Recursos Por ComponenteDocumento1 página4.2.1 Relacion de Recursos Por ComponenteJhoel Quispe TiconaAún no hay calificaciones
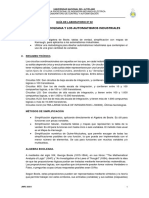
- Guia Laboratorio 2 - 2020 - IDocumento9 páginasGuia Laboratorio 2 - 2020 - IJESUS MIGUEL APAZA ARISACAAún no hay calificaciones
- ALEXKJFSJFJDocumento1 páginaALEXKJFSJFJJhoel Quispe TiconaAún no hay calificaciones
- Proyecto de Cancha DeportivaDocumento1 páginaProyecto de Cancha DeportivaJhoel Quispe TiconaAún no hay calificaciones
- Yeni SKJHKDSKGHJHDSDocumento2 páginasYeni SKJHKDSKGHJHDSJhoel Quispe TiconaAún no hay calificaciones
- 745-Texto Del Artículo-3014-1-10-20210405Documento13 páginas745-Texto Del Artículo-3014-1-10-20210405Jhoel Quispe TiconaAún no hay calificaciones
- 4.2.1 Relacion de Recursos Por ComponenteDocumento2 páginas4.2.1 Relacion de Recursos Por ComponenteJhoel Quispe TiconaAún no hay calificaciones
- Vivienda UnifilarDocumento1 páginaVivienda UnifilarJhoel Quispe TiconaAún no hay calificaciones
- Proyecto - Unap-2021Documento2 páginasProyecto - Unap-2021Jhoel Quispe TiconaAún no hay calificaciones
- Practica 1 - Wilder Jhoel Quispe TiconaDocumento1 páginaPractica 1 - Wilder Jhoel Quispe TiconaJhoel Quispe TiconaAún no hay calificaciones
- Primer Examen Parcial de Sistemas de Potencia 2021 - IDocumento2 páginasPrimer Examen Parcial de Sistemas de Potencia 2021 - IJhoel Quispe TiconaAún no hay calificaciones
- Componentes y funcionamiento básico de un SCADADocumento1 páginaComponentes y funcionamiento básico de un SCADAJhoel Quispe TiconaAún no hay calificaciones
- ALEXKJFSJFJDocumento1 páginaALEXKJFSJFJJhoel Quispe TiconaAún no hay calificaciones
- Arranque Estrella TrianguloDocumento1 páginaArranque Estrella TrianguloJhoel Quispe TiconaAún no hay calificaciones
- Arranque Estrella TrianguloDocumento1 páginaArranque Estrella TrianguloJhoel Quispe TiconaAún no hay calificaciones
- Inversión de Giro de Un Motor TrifásicoDocumento1 páginaInversión de Giro de Un Motor TrifásicoJhoel Quispe TiconaAún no hay calificaciones
- Josue MMHKDSHDSDocumento2 páginasJosue MMHKDSHDSJhoel Quispe TiconaAún no hay calificaciones
- AUTOMATIZACIONDocumento1 páginaAUTOMATIZACIONJhoel Quispe TiconaAún no hay calificaciones
- Calcular La Potencia Necesaria en El TransformadorDocumento1 páginaCalcular La Potencia Necesaria en El TransformadorJhoel Quispe TiconaAún no hay calificaciones
- 04 CADE DibujarDocumento3 páginas04 CADE DibujarCamiloTrujilloAún no hay calificaciones
- Automatas y Control BibliografíaDocumento1 páginaAutomatas y Control BibliografíaJhoel Quispe TiconaAún no hay calificaciones
- GCC-EXC-INDEPDocumento3 páginasGCC-EXC-INDEPJhoel Quispe TiconaAún no hay calificaciones
- Configurar CADDocumento17 páginasConfigurar CADJosé Antonio100% (1)
- 03 Cade EditarDocumento2 páginas03 Cade EditarRomer J Hinojosa MaldonadoAún no hay calificaciones
- Examen sustitutorio de máquinas eléctricas II de la Universidad Nacional del Altiplano - PunoDocumento1 páginaExamen sustitutorio de máquinas eléctricas II de la Universidad Nacional del Altiplano - PunoJhoel Quispe TiconaAún no hay calificaciones
- 05 Cade Modo1Documento1 página05 Cade Modo1jccorazonAún no hay calificaciones
- 01 AyudaDocumento4 páginas01 AyudaJhoel Quispe TiconaAún no hay calificaciones
- 174603-Matricula 2021-I (F)Documento1 página174603-Matricula 2021-I (F)Jhoel Quispe TiconaAún no hay calificaciones
- Mapa Mental 3Documento1 páginaMapa Mental 3David Vito López MoralesAún no hay calificaciones
- Agujero de GusanoDocumento14 páginasAgujero de GusanoOscar OchoaAún no hay calificaciones
- Preguntas Multiple Choice Ley de Coulomb Campo Electrico PotencialDocumento2 páginasPreguntas Multiple Choice Ley de Coulomb Campo Electrico PotencialRocio Belen De La Iglesia100% (1)
- Estudio Primer Parcial CEMyODocumento37 páginasEstudio Primer Parcial CEMyOSara kombe boteAún no hay calificaciones
- Magnons in Low Dimensional Collinear FerromagnetsDocumento51 páginasMagnons in Low Dimensional Collinear FerromagnetsjitenderthakurAún no hay calificaciones
- Guía de Quimica Grado Séptimo P II de 2021Documento12 páginasGuía de Quimica Grado Séptimo P II de 2021Jose MoraAún no hay calificaciones
- Tarea 1 FIS290Documento3 páginasTarea 1 FIS290Diego LorenzoAún no hay calificaciones
- Conceptos y Consideraciones Generales: TemaDocumento32 páginasConceptos y Consideraciones Generales: Temaebert orcco taypeAún no hay calificaciones
- Infografia InterferenciaDocumento1 páginaInfografia InterferenciaDavid González MoralesAún no hay calificaciones
- Sustentacion TC Calculo 3Documento5 páginasSustentacion TC Calculo 3Jennifer GomezAún no hay calificaciones
- Tarea de 415Documento8 páginasTarea de 415angel vivasAún no hay calificaciones
- X 4to DeterminantesDocumento43 páginasX 4to DeterminantesalexhubertAún no hay calificaciones
- Algebra EjerciciosDocumento2 páginasAlgebra EjerciciosivezuAún no hay calificaciones
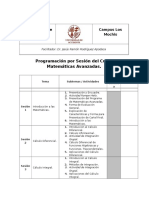
- Planeación Por Día de Matemáticas AvanzadasDocumento3 páginasPlaneación Por Día de Matemáticas AvanzadasLucero Lopez TuzAún no hay calificaciones
- Un IV - Ecuaciones de EstadoDocumento15 páginasUn IV - Ecuaciones de EstadoRaul Gerardo PerezAún no hay calificaciones
- Elipse Centro en El OrigenDocumento9 páginasElipse Centro en El OrigenEmanuel BenAún no hay calificaciones
- Inductancia Propia de Un ConductorDocumento4 páginasInductancia Propia de Un ConductorJosé Alberto MichacaAún no hay calificaciones
- Examen Parcial Teoria de CamposDocumento5 páginasExamen Parcial Teoria de CamposYOSVIN KEVIN GONZALES ANTICONAAún no hay calificaciones
- Configuracion Electronica (33 D)Documento33 páginasConfiguracion Electronica (33 D)Esdras Sanchez PerezAún no hay calificaciones
- Mapa Conceptual de Los Estados de La MateriaDocumento1 páginaMapa Conceptual de Los Estados de La MateriaDandie JharonAún no hay calificaciones
- Cadenas de Markov 2 - Pot de Una Matriz PDFDocumento15 páginasCadenas de Markov 2 - Pot de Una Matriz PDFMarco Andres Munoz AvilaAún no hay calificaciones
- Trabajo de Frontera MovilDocumento11 páginasTrabajo de Frontera MovilRichard PinosAún no hay calificaciones
- Campo ElectricoDocumento24 páginasCampo ElectricoRocio Belen De La IglesiaAún no hay calificaciones
- Deduccion de La Ec Lineal para Un Fluido CompresibleDocumento2 páginasDeduccion de La Ec Lineal para Un Fluido CompresiblePercyAún no hay calificaciones
- Los QuarksDocumento22 páginasLos QuarksBryan PiguaveAún no hay calificaciones
- Conexión (Matemática)Documento2 páginasConexión (Matemática)DRYHFJDAún no hay calificaciones
- Taller 2 Integral Definida PDFDocumento4 páginasTaller 2 Integral Definida PDFDiegoBarcoAún no hay calificaciones
- Derivacion Parcial - GradienteDocumento4 páginasDerivacion Parcial - GradienteC3BAún no hay calificaciones
- Curvas Tec Con Pau PDFDocumento4 páginasCurvas Tec Con Pau PDFlolohgAún no hay calificaciones
- Dinámica de Estructuras-C07 PDFDocumento28 páginasDinámica de Estructuras-C07 PDFjose luisAún no hay calificaciones