También podría gustarte
- 4 SismologiaDocumento28 páginas4 SismologiaJhosemarCcama100% (1)
- 04-Diseño Estructural-Titijoni PDFDocumento34 páginas04-Diseño Estructural-Titijoni PDFJhosemarCcamaAún no hay calificaciones
- Decreto Supremo #029-2019-ViviendaDocumento37 páginasDecreto Supremo #029-2019-ViviendaLa Ley67% (12)
- Apuntes de Ingenieria SanitariaDocumento266 páginasApuntes de Ingenieria SanitariaGuillermo Garcia HernandezAún no hay calificaciones
- TOPERSDocumento2 páginasTOPERSJhosemarCcamaAún no hay calificaciones
- Brochure - Tijerales Metalicos.2023Documento5 páginasBrochure - Tijerales Metalicos.2023JhosemarCcamaAún no hay calificaciones
- Sanitarias 1Documento1 páginaSanitarias 1JhosemarCcamaAún no hay calificaciones
- A B C D: Segundo Y Tercer Piso Aligerado AzoteaDocumento1 páginaA B C D: Segundo Y Tercer Piso Aligerado AzoteaJhosemarCcamaAún no hay calificaciones
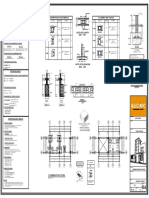
- Estructuras GeneralDocumento1 páginaEstructuras GeneralJhosemarCcamaAún no hay calificaciones
- Elevación Frontal Corte A - ADocumento1 páginaElevación Frontal Corte A - AJhosemarCcamaAún no hay calificaciones
- Arquitectura y DetallesDocumento1 páginaArquitectura y DetallesJhosemarCcamaAún no hay calificaciones
- Estructuras Vigas y AligeradoDocumento1 páginaEstructuras Vigas y AligeradoJhosemarCcamaAún no hay calificaciones
- Arquitectura GeneralDocumento1 páginaArquitectura GeneralJhosemarCcamaAún no hay calificaciones
- Electricas 1Documento1 páginaElectricas 1JhosemarCcamaAún no hay calificaciones
- Pu - FroilanDocumento1 páginaPu - FroilanJhosemarCcamaAún no hay calificaciones
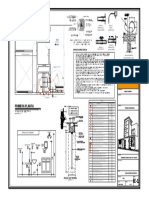
- Primer Piso Segundo Piso: Detalle de Caja de RegistroDocumento1 páginaPrimer Piso Segundo Piso: Detalle de Caja de RegistroJhosemarCcamaAún no hay calificaciones
- Class 1Documento24 páginasClass 1JhosemarCcamaAún no hay calificaciones
- Sismología: Maestría en Ingeniería Estructural y SísmicaDocumento12 páginasSismología: Maestría en Ingeniería Estructural y SísmicaJhosemarCcamaAún no hay calificaciones
- NormaDocumento5 páginasNormahumberto cuevaAún no hay calificaciones
- Ds #002 2017 ViviendaDocumento5 páginasDs #002 2017 ViviendaBenjämin F. Jaimes RojasAún no hay calificaciones
- 03-Estudio Hidrologico e Hidraulico-TitijoniDocumento32 páginas03-Estudio Hidrologico e Hidraulico-TitijoniJhosemarCcamaAún no hay calificaciones
- 03.03 Configuracionde NivelesDocumento17 páginas03.03 Configuracionde NivelesJhosemarCcamaAún no hay calificaciones
- 02-Estudio Geologico y Geotecnico-TitijoniDocumento10 páginas02-Estudio Geologico y Geotecnico-TitijoniJhosemarCcamaAún no hay calificaciones
- 03 01 Vinculacion e Importacion de Arhivos CadDocumento16 páginas03 01 Vinculacion e Importacion de Arhivos CadJose Luis UchihaAún no hay calificaciones
- 01-Estudio Topografico PDFDocumento13 páginas01-Estudio Topografico PDFJhosemarCcamaAún no hay calificaciones
- Vincular modelos en Revit para modelado estructuralDocumento16 páginasVincular modelos en Revit para modelado estructuralJhosemarCcamaAún no hay calificaciones
- 02.02 Editando Elementos PDFDocumento9 páginas02.02 Editando Elementos PDFJhosemarCcamaAún no hay calificaciones
- 01-Estudio Topografico PDFDocumento13 páginas01-Estudio Topografico PDFJhosemarCcamaAún no hay calificaciones
- 02 03 Herramietnas Basicas de BocetoDocumento16 páginas02 03 Herramietnas Basicas de BocetoJhosemarCcamaAún no hay calificaciones
- 02.04 Mas Herramientas de BocetoDocumento9 páginas02.04 Mas Herramientas de BocetoJhosemarCcamaAún no hay calificaciones
- Procedimiento Prueba Hidrostatica - Asme Secc Viii Div1 - 2012.1Documento6 páginasProcedimiento Prueba Hidrostatica - Asme Secc Viii Div1 - 2012.1Jonathan Espinoza MejiaAún no hay calificaciones
- Resistencia Al Cortante de Las Arcillas Parcialmente SaturadasDocumento2 páginasResistencia Al Cortante de Las Arcillas Parcialmente SaturadasGustavo Diaz sarzoAún no hay calificaciones
- Tarea de Muro-Fuerza Lateral PISCINADocumento25 páginasTarea de Muro-Fuerza Lateral PISCINAIvhonne BlancoAún no hay calificaciones
- UnidadDocumento59 páginasUnidadYarlin Tatiana Ortiz BecerraAún no hay calificaciones
- Flujo IncomprensibleDocumento3 páginasFlujo IncomprensibleMarisol JesusAún no hay calificaciones
- Examen de Apoyo 11 Mecanica de Fluidos Hidrostatica 2023 II PDocumento2 páginasExamen de Apoyo 11 Mecanica de Fluidos Hidrostatica 2023 II Pmggp100% (1)
- Materiales aislantes térmicos y eléctricosDocumento16 páginasMateriales aislantes térmicos y eléctricosGénesis RosarioAún no hay calificaciones
- 6 Metodologia Calculo Instalaciones Suelo Radiante ORKLI Fenercom-2017 PDFDocumento20 páginas6 Metodologia Calculo Instalaciones Suelo Radiante ORKLI Fenercom-2017 PDFJayro Espejo Nina0% (1)
- 6° Año - Ciencias - Prueba Capas de La TierraDocumento3 páginas6° Año - Ciencias - Prueba Capas de La TierraMaría José RodríguezAún no hay calificaciones
- Taller1 FisicaMecanicaDocumento3 páginasTaller1 FisicaMecanicaNicolas QuintanaAún no hay calificaciones
- Tesis Saraín Flores Bautista, Juan Flores VillaDocumento62 páginasTesis Saraín Flores Bautista, Juan Flores VillayonnysainzAún no hay calificaciones
- Practica No 3Documento2 páginasPractica No 3VANIA VARGAS VELASQUEZAún no hay calificaciones
- Fallas Por Delaminacion PDFDocumento7 páginasFallas Por Delaminacion PDFJuan Carlos Contreras CherresAún no hay calificaciones
- Enlaces Quimica InorganicaDocumento18 páginasEnlaces Quimica InorganicaRuth WikiAún no hay calificaciones
- Informe Efecto Fotoelectrico PDFDocumento7 páginasInforme Efecto Fotoelectrico PDFFrank LozanoAún no hay calificaciones
- Manual Modelacion Estructuras de Ha 10Documento13 páginasManual Modelacion Estructuras de Ha 10Francisco CarrascoAún no hay calificaciones
- Laboratorio 6Documento2 páginasLaboratorio 6Esnaidert ZuñigaAún no hay calificaciones
- Movimiento armónico simple: ecuaciones, magnitudes y conclusionesDocumento6 páginasMovimiento armónico simple: ecuaciones, magnitudes y conclusionesEugenioAún no hay calificaciones
- 1.3 Distribucion Electronica Modelo Atã'mico de BohrDocumento33 páginas1.3 Distribucion Electronica Modelo Atã'mico de Bohrismael martinezAún no hay calificaciones
- Diseño Albañileria Ing. Rosas.Documento12 páginasDiseño Albañileria Ing. Rosas.Alonso RSAún no hay calificaciones
- Resumen Cinematica PDFDocumento3 páginasResumen Cinematica PDFmin suk kwonAún no hay calificaciones
- Mecánica de SolidosDocumento19 páginasMecánica de Solidosjose israel hernandez bautistaAún no hay calificaciones
- Secado de Partículas SuspendidasDocumento3 páginasSecado de Partículas SuspendidasDULCE GARCIAAún no hay calificaciones
- Informe de Valle ViruDocumento10 páginasInforme de Valle ViruJuan Gabriel Curay SosaAún no hay calificaciones
- Analisis Estabilidad Dinámico (Diseño) - ItascaDocumento92 páginasAnalisis Estabilidad Dinámico (Diseño) - ItascaMark HernándezAún no hay calificaciones
- Capitulo Del Libro de CementaciónDocumento23 páginasCapitulo Del Libro de Cementaciónwilliam rojas vargasAún no hay calificaciones
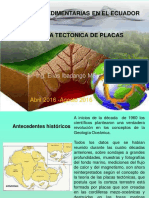
- 1 - Tectonica de Placas 2016-2016Documento53 páginas1 - Tectonica de Placas 2016-2016PabloXavierAún no hay calificaciones
- ENERGÍADocumento26 páginasENERGÍAElioAguilarFLoresAún no hay calificaciones
- Ari-Fig - 12 046Documento4 páginasAri-Fig - 12 046UrybertoAún no hay calificaciones