También podría gustarte
- Practica Figueroa - Inchicaqui AlejandroDocumento1 páginaPractica Figueroa - Inchicaqui AlejandroBoris Benites CalenzaniAún no hay calificaciones
- Laboratorio 1 - Sistema de Control Digital - 01Documento19 páginasLaboratorio 1 - Sistema de Control Digital - 01Boris Benites CalenzaniAún no hay calificaciones
- Laboratorio-Sistemas Control Digital-3 PDFDocumento5 páginasLaboratorio-Sistemas Control Digital-3 PDFBoris Benites CalenzaniAún no hay calificaciones
- Laboratorio-Sistemas Control Digital-3 PDFDocumento5 páginasLaboratorio-Sistemas Control Digital-3 PDFBoris Benites CalenzaniAún no hay calificaciones
- Articulo Cientifico - Control y AutomatizacionDocumento4 páginasArticulo Cientifico - Control y AutomatizacionBoris Benites CalenzaniAún no hay calificaciones
- Levitador Magnetico - Sistemas de Control LLDocumento9 páginasLevitador Magnetico - Sistemas de Control LLBoris Benites CalenzaniAún no hay calificaciones
- Ejercicios para Resolver en LadderDocumento2 páginasEjercicios para Resolver en LadderBoris Benites Calenzani100% (1)
- Muestreadores y Retenedores - Control Digital - Tarea OpcionalDocumento10 páginasMuestreadores y Retenedores - Control Digital - Tarea OpcionalBoris Benites CalenzaniAún no hay calificaciones
- 23 Diap Programacion Ladder PLCDocumento24 páginas23 Diap Programacion Ladder PLCBoris Benites CalenzaniAún no hay calificaciones
- 25 Diap Guia para Ingresar Al PLC ZelioDocumento25 páginas25 Diap Guia para Ingresar Al PLC ZelioBoris Benites CalenzaniAún no hay calificaciones
- Monografia - Electronica de Potencia IiDocumento21 páginasMonografia - Electronica de Potencia IiBoris Benites CalenzaniAún no hay calificaciones
- Laboratorio de Procesamiento Digital de SeñalesDocumento4 páginasLaboratorio de Procesamiento Digital de SeñalesBoris Benites CalenzaniAún no hay calificaciones
- Examen Final - Sistemas de Control IiDocumento10 páginasExamen Final - Sistemas de Control IiBoris Benites CalenzaniAún no hay calificaciones
- Diseño en El Espacio de Estados de Un Controlador Basado en El Metodo de Asignacion de Polos para El Control de Un Sistema de Levitacion MagneticaDocumento9 páginasDiseño en El Espacio de Estados de Un Controlador Basado en El Metodo de Asignacion de Polos para El Control de Un Sistema de Levitacion MagneticaBoris Benites CalenzaniAún no hay calificaciones
- Tarea - Sistemas de Control IiDocumento21 páginasTarea - Sistemas de Control IiBoris Benites CalenzaniAún no hay calificaciones
- Examen Parcial PDS 2020aDocumento2 páginasExamen Parcial PDS 2020aBoris Benites CalenzaniAún no hay calificaciones
- Cruzamanda P4Documento9 páginasCruzamanda P4Cruz Chavez Amanda 1IM6Aún no hay calificaciones
- Coello Mendoza Michell Carolina Análisis de Casos AnsiedadDocumento69 páginasCoello Mendoza Michell Carolina Análisis de Casos AnsiedadCatalina GómezAún no hay calificaciones
- ANALISIS DE PARTICIPACION ChocoDocumento18 páginasANALISIS DE PARTICIPACION ChocoRicardo Garnica HuertasAún no hay calificaciones
- Clasificacion de Las BD y Tipos de DatosDocumento13 páginasClasificacion de Las BD y Tipos de DatosSantiago Acosta PinedaAún no hay calificaciones
- S15.s1-s2-Práctica Calificada 2 (2021-AgostoDocumento6 páginasS15.s1-s2-Práctica Calificada 2 (2021-AgostoMariajesus Alexandra Maquera QuispeAún no hay calificaciones
- Sistemas No Lineales EspecialesDocumento9 páginasSistemas No Lineales EspecialesShiomara Villena UrrutiaAún no hay calificaciones
- S9 D4 IV LeemosjuntosDocumento3 páginasS9 D4 IV LeemosjuntosDavid Alva berceraAún no hay calificaciones
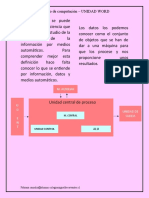
- La Informática Se Puede Definir Como La Ciencia Que Se Encarga Del Estudio de La Obtención de La Información Por Medios AutomáticosDocumento7 páginasLa Informática Se Puede Definir Como La Ciencia Que Se Encarga Del Estudio de La Obtención de La Información Por Medios AutomáticosFabiana Giulia Camelio VasquezAún no hay calificaciones
- Tarea 4Documento6 páginasTarea 4AnaGiselaAún no hay calificaciones
- Unidad de Aprendizaje No 4 Seguimos Con ExcelDocumento10 páginasUnidad de Aprendizaje No 4 Seguimos Con ExcelValentina GazconAún no hay calificaciones
- Actividad Fundamental 1Documento3 páginasActividad Fundamental 1Alfredo TorresAún no hay calificaciones
- Memoria Descriptiva El ParaisoDocumento26 páginasMemoria Descriptiva El ParaisoNc MeliAún no hay calificaciones
- Alcanos, Enos, InosDocumento77 páginasAlcanos, Enos, InosKatherine RamirezAún no hay calificaciones
- Los Altos Grados MasónicosDocumento9 páginasLos Altos Grados MasónicosMarco TapiaAún no hay calificaciones
- Exposicion ProyectoDocumento12 páginasExposicion ProyectoNathaly SanabriaAún no hay calificaciones
- Acuerdo N0. 470 de 2019Documento29 páginasAcuerdo N0. 470 de 2019Johan RubianoAún no hay calificaciones
- Gestión de La Seguridad de La InformaciónDocumento18 páginasGestión de La Seguridad de La InformaciónMARTINEZ/FELIZ JUANAún no hay calificaciones
- Casos AnálogosDocumento24 páginasCasos Análogosl22140435Aún no hay calificaciones
- Pipelina en Español Proteccion CatodicaDocumento117 páginasPipelina en Español Proteccion CatodicaIsrael Babithor Rojas ValgreenAún no hay calificaciones
- Wuolah Free Psicologia Fisiologica Con Las Preguntas Que Puso El Profe en El 1er Parcial 1Documento14 páginasWuolah Free Psicologia Fisiologica Con Las Preguntas Que Puso El Profe en El 1er Parcial 1Celia MartinAún no hay calificaciones
- Boletin Academico Jessica Alexandra Cabrera BecerraDocumento2 páginasBoletin Academico Jessica Alexandra Cabrera BecerraLeidy GuzmanAún no hay calificaciones
- Cuadro Comparativo Actividad 1 Riesgos BiológicosDocumento6 páginasCuadro Comparativo Actividad 1 Riesgos BiológicosKarla MartiinezAún no hay calificaciones
- Comentario de La Película La Decisión Más DifícilDocumento5 páginasComentario de La Película La Decisión Más DifícilRoxanaAún no hay calificaciones
- 1 MEDICIONES DEBER UgDocumento2 páginas1 MEDICIONES DEBER UgAnnabelle MerchanAún no hay calificaciones
- Normograma en SaludDocumento5 páginasNormograma en Saludkiara Bravo MontoyaAún no hay calificaciones
- Estructuras Del Sistema Nervioso y Su Relación Con El LenguajeDocumento3 páginasEstructuras Del Sistema Nervioso y Su Relación Con El LenguajeKate Zamudio RiveraAún no hay calificaciones
- Mapa Conceptual Prehistoria, China y EgiptoDocumento6 páginasMapa Conceptual Prehistoria, China y EgiptoRigoberto LeonAún no hay calificaciones
- Glosario de Estetica y Cosmiatria PDFDocumento22 páginasGlosario de Estetica y Cosmiatria PDFleilithcordova cordova50% (2)
- Luom 2015 R 1Documento1007 páginasLuom 2015 R 1ruthAún no hay calificaciones
- Ae4450a FZ1CDocumento4 páginasAe4450a FZ1CNorberto Ariel GomezAún no hay calificaciones