También podría gustarte
- Innovacion Social en CommonsDocumento26 páginasInnovacion Social en CommonsAndres MorenoAún no hay calificaciones
- Deber 10 (Prueba Hipot. Media y Varianza)Documento2 páginasDeber 10 (Prueba Hipot. Media y Varianza)Andres MorenoAún no hay calificaciones
- Deber 12 (Bondad de Ajuste)Documento5 páginasDeber 12 (Bondad de Ajuste)Andres MorenoAún no hay calificaciones
- Deber 9 (Intervalos de Confianza)Documento3 páginasDeber 9 (Intervalos de Confianza)Andres Moreno0% (1)
- Pensamiento Ambiental - Somos NaturalezaDocumento1 páginaPensamiento Ambiental - Somos NaturalezaAndres MorenoAún no hay calificaciones
- Resumen de La Revolución Científica y TecnológicaDocumento1 páginaResumen de La Revolución Científica y TecnológicaAndres MorenoAún no hay calificaciones
- En La Era de La Información, Información, Tecnología y Estudio Del ComportamientoDocumento5 páginasEn La Era de La Información, Información, Tecnología y Estudio Del ComportamientoAndres MorenoAún no hay calificaciones
- Divergencia y Rotacional de Un Campo Vectorial PDFDocumento8 páginasDivergencia y Rotacional de Un Campo Vectorial PDFAndres MorenoAún no hay calificaciones
- Conclusiones Sobre Las Exposiciones "En La Era de La Información, Información, Tecnología y Estudio Del Comportamiento"Documento1 páginaConclusiones Sobre Las Exposiciones "En La Era de La Información, Información, Tecnología y Estudio Del Comportamiento"Andres MorenoAún no hay calificaciones
- Debate Sobre SwadeshiDocumento4 páginasDebate Sobre SwadeshiAndres MorenoAún no hay calificaciones
- Curva de La OfertaDocumento1 páginaCurva de La OfertaAndres Moreno100% (1)
- Campos Escalares PDFDocumento14 páginasCampos Escalares PDFAndres MorenoAún no hay calificaciones
- Introducción, Límites y Continuidad PDFDocumento23 páginasIntroducción, Límites y Continuidad PDFAndres MorenoAún no hay calificaciones
- Orden Dia 24 Abril 2019Documento38 páginasOrden Dia 24 Abril 2019islenaAún no hay calificaciones
- V de Gowin 3practicaDocumento1 páginaV de Gowin 3practicaMaria Jose Olivero CarrascalAún no hay calificaciones
- Guía de Trabajo N°8 Historia 2° Básico 25 Al 29 de MayoDocumento3 páginasGuía de Trabajo N°8 Historia 2° Básico 25 Al 29 de MayoSanti Las BrisasAún no hay calificaciones
- Chaves - Diseño y Comunicación, Teorías y Enfoques Críticos (Reseña)Documento8 páginasChaves - Diseño y Comunicación, Teorías y Enfoques Críticos (Reseña)judaco1Aún no hay calificaciones
- Prcesos ConstructivosDocumento4 páginasPrcesos ConstructivosDaniel Felipe Rojas ParraAún no hay calificaciones
- Infografia Etica EmpresarialDocumento4 páginasInfografia Etica Empresarialyina fernandez gilAún no hay calificaciones
- Fenómenos Naturales - OkDocumento20 páginasFenómenos Naturales - OkLucia Catita Tarqui CajanAún no hay calificaciones
- 1.0.giner, S. (2011) - Teoría Sociológica Clásica. Capítulo 1, Hacia Una Ciencia de La Sociedad Págs. 17-28.Documento12 páginas1.0.giner, S. (2011) - Teoría Sociológica Clásica. Capítulo 1, Hacia Una Ciencia de La Sociedad Págs. 17-28.Lizeth JuárezAún no hay calificaciones
- Esquemas de Vacunacion Niños y Adultos.Documento9 páginasEsquemas de Vacunacion Niños y Adultos.Natalia Martinez RdzAún no hay calificaciones
- Redefinir La Vida Cristiana VictoriosaDocumento3 páginasRedefinir La Vida Cristiana VictoriosaHoracio AlcarazAún no hay calificaciones
- Carbohidratos en OdontologíaDocumento3 páginasCarbohidratos en Odontologíaally_directioner100% (1)
- Informacion Machu PicchuDocumento4 páginasInformacion Machu PicchuAlexander GuzmanAún no hay calificaciones
- Reporte de VisitaDocumento4 páginasReporte de Visitafernando100% (1)
- Aspecto LiterarioDocumento7 páginasAspecto LiterarioMoni PimientoAún no hay calificaciones
- Clasificacion de Brazos RoboticosDocumento12 páginasClasificacion de Brazos RoboticosRichard Muñoz100% (1)
- 1 Memoria de Un Proyecto TecnologicoDocumento1 página1 Memoria de Un Proyecto TecnologicoAnonymous NzY5h9z6GAún no hay calificaciones
- Curso de Guitarra - Jean PierreDocumento85 páginasCurso de Guitarra - Jean PierreEmanuelAún no hay calificaciones
- BMCDocumento4 páginasBMCRocío Gutiérrez de CabiedesAún no hay calificaciones
- Pedagogia Del SillpanchoDocumento2 páginasPedagogia Del SillpanchoEdwin Gustavo Layme MareñoAún no hay calificaciones
- Analisis Vertical y Horizontal Del Estado de Resultados 12Documento6 páginasAnalisis Vertical y Horizontal Del Estado de Resultados 12Fany Esperanza Castro PalominoAún no hay calificaciones
- Certificado PDFDocumento2 páginasCertificado PDFzlatna marcela mejia molinaAún no hay calificaciones
- Fiche Mon Sac À Dos Et Le Verbe AvoirDocumento2 páginasFiche Mon Sac À Dos Et Le Verbe AvoirAinhoa Lucas GriñanAún no hay calificaciones
- Cálculo de Sobreancho en CurvasDocumento15 páginasCálculo de Sobreancho en CurvasAlejandro GonzalezAún no hay calificaciones
- The Guardian NovelaDocumento6 páginasThe Guardian NovelaDanielaAún no hay calificaciones
- Oficio TolucaDocumento3 páginasOficio TolucaDiana Caroina L. N.Aún no hay calificaciones
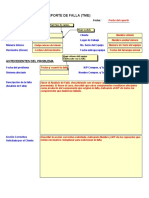
- Reporte de Falla - GarantiaDocumento5 páginasReporte de Falla - GarantiaWladimir Franz Rodríguez SaloméAún no hay calificaciones
- Recopilatorio Erótico "Juego de Verano"Documento72 páginasRecopilatorio Erótico "Juego de Verano"Patricia K. Olivera100% (3)
- La Última HojaDocumento8 páginasLa Última HojaKemberli gualdronAún no hay calificaciones
- I. Diagrama de ParetoDocumento3 páginasI. Diagrama de ParetoJamirAún no hay calificaciones
- Crítica Literaria y GéneroDocumento164 páginasCrítica Literaria y GéneroAnaLauraAún no hay calificaciones