También podría gustarte
- Practica 1Documento9 páginasPractica 1MartinSena100% (1)
- Ejercicios C1 StudDocumento5 páginasEjercicios C1 StudJuan PuertasAún no hay calificaciones
- Formato de Informe de Práctica de LaboratorioDocumento2 páginasFormato de Informe de Práctica de LaboratorioPayto IdrovoAún no hay calificaciones
- Practica de EstaticaDocumento7 páginasPractica de EstaticaDiego Andres LAún no hay calificaciones
- Meta 1.1Documento16 páginasMeta 1.1RichiyRamirezGarciaAún no hay calificaciones
- EstaticaDocumento6 páginasEstaticadalila8697Aún no hay calificaciones
- Lab 2 EstáticaDocumento6 páginasLab 2 EstáticaPao BelesacaAún no hay calificaciones
- Informe Lab Estatica 1 g10Documento9 páginasInforme Lab Estatica 1 g10Franklin Armando VacaAún no hay calificaciones
- Practica 3 TensionDocumento34 páginasPractica 3 TensionEdgar Hernandez ArrietaAún no hay calificaciones
- Diapo Meca 2Documento22 páginasDiapo Meca 2Jheison Eliacer Quispe HolguinAún no hay calificaciones
- TareasUnidad1 PDFDocumento12 páginasTareasUnidad1 PDFMejia Sepulveda50% (2)
- Cables Estatica ReparadoDocumento12 páginasCables Estatica ReparadoFeelix LeniinnAún no hay calificaciones
- 2 Descomposicion de Fuerzas en Tres DimensionesDocumento5 páginas2 Descomposicion de Fuerzas en Tres DimensionesBrYan Cabrera33% (3)
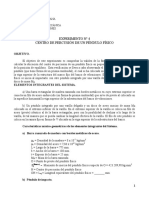
- (014a) Experimento Nº 4 (Centro de Percusión)Documento8 páginas(014a) Experimento Nº 4 (Centro de Percusión)Ricardo ElZelahAún no hay calificaciones
- Estatica Cuerpo Rigido Parctico ColeDocumento2 páginasEstatica Cuerpo Rigido Parctico Colematematica fisica quimica boliviaAún no hay calificaciones
- Práctica de Mecánica Vectorial Cinética.Documento20 páginasPráctica de Mecánica Vectorial Cinética.David Hernández100% (2)
- Solucionario MecanicaDocumento16 páginasSolucionario MecanicaGilmer Aviles Huatuco50% (2)
- Cuestonario Practica 2 Caida LibreDocumento3 páginasCuestonario Practica 2 Caida LibreJessica CastilloAún no hay calificaciones
- Torsion en Barras No CircularesDocumento8 páginasTorsion en Barras No CircularesJaime Paguay SerpaAún no hay calificaciones
- 3.5 A 3.7Documento5 páginas3.5 A 3.7eduardo nietoAún no hay calificaciones
- Lab Estatica TorquesDocumento6 páginasLab Estatica TorquesPamelaLazoAún no hay calificaciones
- 13 Ec Mov Coord Nor Tang ProblDocumento2 páginas13 Ec Mov Coord Nor Tang Probluniuns100% (1)
- Tercera Práctica Calificada de Mecánica Racional I - 2020 (A)Documento1 páginaTercera Práctica Calificada de Mecánica Racional I - 2020 (A)Julio Cesar Del Pino MamaniAún no hay calificaciones
- Taller Tema 3Documento3 páginasTaller Tema 3Sebas ValenciaAún no hay calificaciones
- TPN 4 Tornillo de Transmision Problemas Resueltos 2017Documento11 páginasTPN 4 Tornillo de Transmision Problemas Resueltos 2017Alex Quispe Montesinos0% (1)
- 4 Sumatoria de Fuerzas y TorquesDocumento6 páginas4 Sumatoria de Fuerzas y TorquesLourdes G-p0% (1)
- ESFUERZODocumento16 páginasESFUERZOMauricio Coutiño FerrazAún no hay calificaciones
- Ejercicios de ElectromagnetismoDocumento6 páginasEjercicios de ElectromagnetismoJavier Garcia100% (1)
- PR Ctica Final Fis211Documento6 páginasPR Ctica Final Fis211Manuel AlejandroAún no hay calificaciones
- Marco TeoricoDocumento9 páginasMarco TeoricoJose Luis ArandaAún no hay calificaciones
- Medida Del Potencial de CeldaDocumento6 páginasMedida Del Potencial de CeldaMauro VanAún no hay calificaciones
- Integracion NumericaDocumento81 páginasIntegracion NumericaOliviaSanMiguelHerbasAún no hay calificaciones
- Tarea 1 II 2014Documento2 páginasTarea 1 II 2014Implementacion SotwareAún no hay calificaciones
- Pract 3 Distribucion de Fuerzas en Una VigaDocumento5 páginasPract 3 Distribucion de Fuerzas en Una Vigafernando leon0% (1)
- Ensayo Tension EQUIPO Práctica ING MarDocumento10 páginasEnsayo Tension EQUIPO Práctica ING MarOscar VerzyAún no hay calificaciones
- Guía N°02 - Equilibrio - Equilibrio Del Cuerpo RígidoDocumento8 páginasGuía N°02 - Equilibrio - Equilibrio Del Cuerpo RígidoJean Paul SalasAún no hay calificaciones
- Ejercicios Resueltos Beer Grupo 03Documento40 páginasEjercicios Resueltos Beer Grupo 03Gerardo AriasAún no hay calificaciones
- Guà A N° 2 Práctica de Laboratorio de EstáticaDocumento9 páginasGuà A N° 2 Práctica de Laboratorio de EstáticaScarlet Mabel Medina CascanteAún no hay calificaciones
- Practica 6 - Conductores EléctricosDocumento16 páginasPractica 6 - Conductores EléctricosAdan GonzalezAún no hay calificaciones
- Electricidad y MagnetismoDocumento11 páginasElectricidad y MagnetismoSofia CabreraAún no hay calificaciones
- Funciones TrigonométricasDocumento27 páginasFunciones TrigonométricasLorena Mabel Guiñazú100% (1)
- Laboratorio de FuerzasDocumento8 páginasLaboratorio de FuerzasAndresFelipeChinguadObandoAún no hay calificaciones
- Ejercicios ResueltosDocumento5 páginasEjercicios ResueltosRodrigo Cabrera0% (1)
- 1 Fuerza en Un Plano InclinadoDocumento5 páginas1 Fuerza en Un Plano InclinadoBrYan CabreraAún no hay calificaciones
- Ejercicios Taller 1 Física III UISDocumento6 páginasEjercicios Taller 1 Física III UISJonathan Arley Torres CastañedaAún no hay calificaciones
- 2º Bloque - EstáticaDocumento18 páginas2º Bloque - EstáticaAnto Giardina0% (1)
- TAREA UV-01 Potencia en CADocumento1 páginaTAREA UV-01 Potencia en CADayana VelasquezAún no hay calificaciones
- Momento de InerciaDocumento5 páginasMomento de InerciaazelfxdAún no hay calificaciones
- Transformaciones de Esfuerzos y DeformacionesDocumento23 páginasTransformaciones de Esfuerzos y DeformacionesRosalyn AVAún no hay calificaciones
- Ejercicios Tema 4Documento31 páginasEjercicios Tema 4Tristan Villanueva CoutiñoAún no hay calificaciones
- Armaduras Planas y EspacialesDocumento24 páginasArmaduras Planas y EspacialesJoséSalcedoReáteguiAún no hay calificaciones
- Derivada DireccionalDocumento11 páginasDerivada DireccionalSmith CórdovaAún no hay calificaciones
- 2° Practica de DinamicaDocumento7 páginas2° Practica de DinamicaErick Perez0% (1)
- Practica 1Documento13 páginasPractica 1Eduardo NietoAún no hay calificaciones
- Impulso y Cantidad de Movimiento CattyDocumento7 páginasImpulso y Cantidad de Movimiento Cattycatty2tatiana2ortiz2Aún no hay calificaciones
- Guias Practicas de Laboratorio Sep2012Documento55 páginasGuias Practicas de Laboratorio Sep2012Andres AndradeAún no hay calificaciones
- Guías Prácticas de Laboratorio PDFDocumento51 páginasGuías Prácticas de Laboratorio PDFLuis Fernando100% (1)
- Practica 2Documento7 páginasPractica 2diego100% (1)
- Estatica 21abrilDocumento7 páginasEstatica 21abrilFeLipe MaldOnadoAún no hay calificaciones
- Practica 1Documento9 páginasPractica 1diegoAún no hay calificaciones
- CuadernilloXXV2017 v1Documento11 páginasCuadernilloXXV2017 v1José Muñoz SantonjaAún no hay calificaciones
- Practica de Lab FisicaDocumento5 páginasPractica de Lab FisicaVictor SagastumeAún no hay calificaciones
- Modulo. Administracion IiDocumento131 páginasModulo. Administracion IiMaria Lucia RiosAún no hay calificaciones
- Campos Tematicos MatematicaDocumento52 páginasCampos Tematicos MatematicaWilliam A. Arteaga RengifoAún no hay calificaciones
- Taller Estadistica Descriptiva Medidas de DispersionDocumento6 páginasTaller Estadistica Descriptiva Medidas de DispersionDuvan BastidasAún no hay calificaciones
- Capacidad Que Tienen Las Personas de Formar Ideas y Representaciones de La Realidad en Su MenteDocumento2 páginasCapacidad Que Tienen Las Personas de Formar Ideas y Representaciones de La Realidad en Su MenteSalvador GallardoAún no hay calificaciones
- Modelo de Cartera de InversiónDocumento6 páginasModelo de Cartera de InversiónYhovanny CH CalleAún no hay calificaciones
- Programa MB2Documento4 páginasPrograma MB2Ian MarroquínAún no hay calificaciones
- Actividad 4Documento8 páginasActividad 4Guillermo Ramos0% (1)
- Avance Proyecto Ecuaciones DiferencialesDocumento4 páginasAvance Proyecto Ecuaciones DiferencialesRuben Santiago Torres CabezasAún no hay calificaciones
- Congruencia de Triangulos Geometria de 4to 2023Documento8 páginasCongruencia de Triangulos Geometria de 4to 2023Enrique LizamaAún no hay calificaciones
- Simce Fracciones y DecimalesDocumento7 páginasSimce Fracciones y DecimalesKarina AlejandraAún no hay calificaciones
- Taller 2Documento5 páginasTaller 2Jennifer Murcia collazosAún no hay calificaciones
- Homogeneidad DimensionalDocumento32 páginasHomogeneidad DimensionalFany Monse Mendoza57% (7)
- Plan Finalidad Secundaria FinE S 3 DefinitivoDocumento5 páginasPlan Finalidad Secundaria FinE S 3 DefinitivoIrenemmAún no hay calificaciones
- Ejercicios Del Capítulo 7 Desde El 7-36 Al 7-38Documento6 páginasEjercicios Del Capítulo 7 Desde El 7-36 Al 7-38Joel AlcivarAún no hay calificaciones
- Matriz de DescubrimientoDocumento5 páginasMatriz de Descubrimientoskiti_valma100% (1)
- S2 - Razonamiento MatematicoDocumento3 páginasS2 - Razonamiento MatematicoSyan Denzel Zela RuelasAún no hay calificaciones
- Guia PedagógicaDocumento3 páginasGuia Pedagógicaluis morenoAún no hay calificaciones
- Fuerzas Debido A Los Fluidos en MovmientoDocumento15 páginasFuerzas Debido A Los Fluidos en MovmientoCrlOs MgUel ArAndAún no hay calificaciones
- SolidCast FlowcastDocumento39 páginasSolidCast FlowcastJosue Garcia YarangaAún no hay calificaciones
- Ecuaciones e InecuacionesDocumento16 páginasEcuaciones e InecuacionesCristhian AlejandroAún no hay calificaciones
- 6 M - Examen - U5 - CorregidoDocumento2 páginas6 M - Examen - U5 - CorregidoEsterAún no hay calificaciones
- Curvas Características de Una BombajjjjjDocumento25 páginasCurvas Características de Una BombajjjjjJovani MartinezAún no hay calificaciones
- Tema Acv s05 Foro de Debate Calificado 04 Ep ProbabilidadesDocumento86 páginasTema Acv s05 Foro de Debate Calificado 04 Ep ProbabilidadesKevin Rivas LeonAún no hay calificaciones
- Ta - Metodos Estadisticos para La Investigacion - Pool Perez PeñaDocumento10 páginasTa - Metodos Estadisticos para La Investigacion - Pool Perez PeñaPool Mayker Perez PeñaAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Unidad 3 - Paso 4 - Descripción de La InformaciónDocumento15 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 3 - Paso 4 - Descripción de La InformaciónYeiner ZabalaAún no hay calificaciones
- Matemáticas - Matrices - Tipos de Matrices - WikilibrosDocumento8 páginasMatemáticas - Matrices - Tipos de Matrices - WikilibrostonyAún no hay calificaciones
- Que Es ApotemaDocumento5 páginasQue Es ApotemaJose MerchanAún no hay calificaciones
- Evaluacion Diagnostica Enseñanza Media, MATEMATICADocumento5 páginasEvaluacion Diagnostica Enseñanza Media, MATEMATICAEDOLIA PALLAUTAAún no hay calificaciones