También podría gustarte
- Caso SpotifyDocumento5 páginasCaso SpotifyRamosManzanoMarianoAún no hay calificaciones
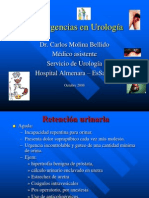
- Emergencias en UrologíaDocumento58 páginasEmergencias en UrologíaGamarra Pazo Jose100% (2)
- Iacc Hacking Ético Tarea S2Documento13 páginasIacc Hacking Ético Tarea S2loadmasther100% (1)
- Labores Verticales Inclinadas y HorizontalesDocumento43 páginasLabores Verticales Inclinadas y Horizontalescharles3488Aún no hay calificaciones
- Tarea 1 GuitarraDocumento9 páginasTarea 1 GuitarraCristian RicauteAún no hay calificaciones
- Etapa 2 Grupo 203052 64Documento31 páginasEtapa 2 Grupo 203052 64Cristian Ricaute100% (1)
- Tarea 2 Catedra SocialDocumento2 páginasTarea 2 Catedra SocialCristian RicauteAún no hay calificaciones
- Tarea 2 TelecontrolDocumento10 páginasTarea 2 TelecontrolCristian RicauteAún no hay calificaciones
- Tarea 3 10.3.5 Packet Tracer - Implement Basic ConnectivityDocumento15 páginasTarea 3 10.3.5 Packet Tracer - Implement Basic ConnectivityCristian RicauteAún no hay calificaciones
- Tarea 3 9.2.9 Packet Tracer - Implement Basic ConnectivityDocumento16 páginasTarea 3 9.2.9 Packet Tracer - Implement Basic ConnectivityCristian RicauteAún no hay calificaciones
- Tarea 2 2..9.1 Packet Tracer - Implement Basic ConnectivityDocumento18 páginasTarea 2 2..9.1 Packet Tracer - Implement Basic ConnectivityCristian RicauteAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Unidad 2 - Tarea 2 - Acondicionar Señales AnalógicasDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 2 - Tarea 2 - Acondicionar Señales AnalógicasCristian RicauteAún no hay calificaciones
- Tarea 3 12.6.6 Packet Tracer - Implement Basic ConnectivityDocumento18 páginasTarea 3 12.6.6 Packet Tracer - Implement Basic ConnectivityCristian RicauteAún no hay calificaciones
- Tarea 3 GuitarraDocumento12 páginasTarea 3 GuitarraCristian RicauteAún no hay calificaciones
- Ejercicios 1 - Distribución BinomialDocumento10 páginasEjercicios 1 - Distribución BinomialCristian RicauteAún no hay calificaciones
- Ejercicios 1 - Distribución BinomialDocumento10 páginasEjercicios 1 - Distribución BinomialCristian RicauteAún no hay calificaciones
- Ejercicios 1 - Distribución BinomialDocumento10 páginasEjercicios 1 - Distribución BinomialCristian RicauteAún no hay calificaciones
- UNAD - Física General - 100413: Freddy Alexander TorresDocumento36 páginasUNAD - Física General - 100413: Freddy Alexander TorresCristian RicauteAún no hay calificaciones
- Digital 1Documento17 páginasDigital 1Cristian RicauteAún no hay calificaciones
- Ejemplos Resueltos Contrastes HipotesisDocumento29 páginasEjemplos Resueltos Contrastes HipotesisManuelAún no hay calificaciones
- Gravimetria HierroDocumento6 páginasGravimetria HierroLuis Eduardo RenteriaAún no hay calificaciones
- Desgaste Piñones Caja de CambiosDocumento4 páginasDesgaste Piñones Caja de CambiosDiego VargasAún no hay calificaciones
- Agua Viscocidad PDFDocumento1 páginaAgua Viscocidad PDFcristo haro100% (1)
- Matriz Comparativa de RucDocumento7 páginasMatriz Comparativa de RucJESUSAún no hay calificaciones
- Inglés 1 - Unidad 2Documento20 páginasInglés 1 - Unidad 2FacundoAún no hay calificaciones
- El Diario de Ana FrankDocumento11 páginasEl Diario de Ana FranklaurigatiAún no hay calificaciones
- Antropoides y HomínidosDocumento31 páginasAntropoides y Homínidosvioedy80% (5)
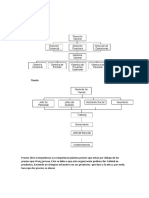
- 3 OrganigramaDocumento4 páginas3 OrganigramaErick rivera vegaAún no hay calificaciones
- Clase 03 Gases Industriales 2Documento14 páginasClase 03 Gases Industriales 2Heidy AlcarrazAún no hay calificaciones
- Lab 5 Brayan Sabillon 21911131Documento16 páginasLab 5 Brayan Sabillon 21911131Brayan SabillonAún no hay calificaciones
- El Bambu o Caña GuaduaDocumento16 páginasEl Bambu o Caña GuaduaWill Y. MoonAún no hay calificaciones
- Red de Proveedores A Nivel Nacional 27 08 2021 PDFDocumento29 páginasRed de Proveedores A Nivel Nacional 27 08 2021 PDFAnibal SalazarAún no hay calificaciones
- Proyecto de Investigación..1Documento6 páginasProyecto de Investigación..1Aguado Yovera Juan FelipeAún no hay calificaciones
- Philip Crosby-6Documento13 páginasPhilip Crosby-6Lian Mamani CopaAún no hay calificaciones
- Cuadro ComparativoDocumento2 páginasCuadro ComparativoSebastianAún no hay calificaciones
- Lineamientos de Evaluación AA1Documento3 páginasLineamientos de Evaluación AA1Rosmendy Marcelino Holguin RiveraAún no hay calificaciones
- (UML) y Patrones de DiseñoDocumento12 páginas(UML) y Patrones de Diseñocotesrodriguez.00Aún no hay calificaciones
- Sensor de BiomagnetismoDocumento11 páginasSensor de BiomagnetismodiegoAún no hay calificaciones
- Repaso Área ADocumento9 páginasRepaso Área AJeferson YucraAún no hay calificaciones
- TRANSMISIONDocumento6 páginasTRANSMISIONJulio javier Callisaya viadezAún no hay calificaciones
- Lista de Chequeo Actividad 3 PDFDocumento1 páginaLista de Chequeo Actividad 3 PDFJulian OrozAún no hay calificaciones
- 50 Verbos Regulares en Ingles y Espanol en Presente y PasadoDocumento2 páginas50 Verbos Regulares en Ingles y Espanol en Presente y PasadoAndy TrujilloAún no hay calificaciones
- Q Fue KausaDocumento5 páginasQ Fue KausaDiego kevin Ticona PerccaAún no hay calificaciones
- Sem 22 Act 5 Mat 5°Documento29 páginasSem 22 Act 5 Mat 5°Luis fabiano Rivera canalesAún no hay calificaciones
- Semana 4 Guia 5 AutobiografiaDocumento3 páginasSemana 4 Guia 5 AutobiografiaAnonymous aZ4G6LJHAún no hay calificaciones