También podría gustarte
- AutoDocumento1 páginaAutoAngela Marcela Diaz FernandezAún no hay calificaciones
- Formulación y Evaluación de Proyectos de IngenieríaDocumento13 páginasFormulación y Evaluación de Proyectos de IngenieríaAngela Marcela Diaz FernandezAún no hay calificaciones
- Accion de Mejora Proceso Servicio Al Cliente en La Empresa Inversiones Nevada LtdaDocumento3 páginasAccion de Mejora Proceso Servicio Al Cliente en La Empresa Inversiones Nevada LtdaAngela Marcela Diaz FernandezAún no hay calificaciones
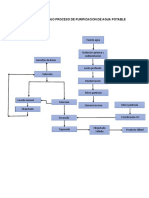
- Diagrama de Flujo Proceso de Purificacion de Agua PotableDocumento4 páginasDiagrama de Flujo Proceso de Purificacion de Agua PotableAngela Marcela Diaz Fernandez67% (3)
- Guía de Actividades y Rúbrica de Evaluación - Tarea 1 - Generalidades Del Dibujo de IngenieríaDocumento6 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 1 - Generalidades Del Dibujo de Ingenieríarafael velasquezAún no hay calificaciones
- Guia de Actividades y Rúbrica de Evaluación - Unidad 1-Fase 1 - Reconocimiento Del CursoDocumento7 páginasGuia de Actividades y Rúbrica de Evaluación - Unidad 1-Fase 1 - Reconocimiento Del CursoIngenieroAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Tarea 2 - Dibujo A Mano AlzadaDocumento8 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 2 - Dibujo A Mano Alzadarafael velasquezAún no hay calificaciones
- Guia de Actividades y Rúbrica de Evaluación - Unidad 1-Fase 1 - Reconocimiento Del CursoDocumento7 páginasGuia de Actividades y Rúbrica de Evaluación - Unidad 1-Fase 1 - Reconocimiento Del CursoIngenieroAún no hay calificaciones
- Guía de Actividades y Rubrica de Evaluación - Tarea 2 - Funciones y Validación de DatosDocumento10 páginasGuía de Actividades y Rubrica de Evaluación - Tarea 2 - Funciones y Validación de DatosAndres AlzateAún no hay calificaciones
- Paso2 NederRodriguezDocumento2 páginasPaso2 NederRodriguezAngela Marcela Diaz FernandezAún no hay calificaciones
- Fase - Final - Grupo 212029 - 41Documento19 páginasFase - Final - Grupo 212029 - 41Angela Marcela Diaz FernandezAún no hay calificaciones
- Pre-Saberes NederJoseRodriguezDocumento8 páginasPre-Saberes NederJoseRodriguezAngela Marcela Diaz FernandezAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Tarea 1 - Generalidades Del Dibujo de IngenieríaDocumento6 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 1 - Generalidades Del Dibujo de Ingenieríarafael velasquezAún no hay calificaciones
- Formulación y Evaluación de Proyectos de IngenieríaDocumento13 páginasFormulación y Evaluación de Proyectos de IngenieríaAngela Marcela Diaz FernandezAún no hay calificaciones
- Guía de Actividades y Rubrica de Evaluación - Paso - 1 - Reconocer Los Presaberes Modelos - Simulacion.Documento8 páginasGuía de Actividades y Rubrica de Evaluación - Paso - 1 - Reconocer Los Presaberes Modelos - Simulacion.Angela Marcela Diaz FernandezAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Tarea 1 - Generalidades Del Dibujo de IngenieríaDocumento6 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 1 - Generalidades Del Dibujo de Ingenieríarafael velasquezAún no hay calificaciones
- archivetempTF Grupo 212022 43Documento17 páginasarchivetempTF Grupo 212022 43Angela Marcela Diaz FernandezAún no hay calificaciones
- Guía de Actividades y Rubrica de Evaluación - Tarea 1 - PresaberesDocumento6 páginasGuía de Actividades y Rubrica de Evaluación - Tarea 1 - PresaberesJuan camilo Mendoza MaldonadoAún no hay calificaciones
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Tomo 1Documento200 páginasTomo 1Angela Marcela Diaz FernandezAún no hay calificaciones
- Estudio de caso microempresa Industrias CEB producción piezas metalmecánicasDocumento2 páginasEstudio de caso microempresa Industrias CEB producción piezas metalmecánicasoscar ortiz saenzAún no hay calificaciones
- Anexo Caso Post TareaDocumento2 páginasAnexo Caso Post TareaAngela Marcela Diaz FernandezAún no hay calificaciones
- Estrategias de mejora continuaDocumento9 páginasEstrategias de mejora continuaAngela Marcela Diaz FernandezAún no hay calificaciones
- Anexo 1 - Empresa Modelo Planta de GolosinasDocumento2 páginasAnexo 1 - Empresa Modelo Planta de GolosinasAngela Marcela Diaz FernandezAún no hay calificaciones
- Herramientas de CalidadDocumento16 páginasHerramientas de CalidadMauricio SánchezAún no hay calificaciones
- Estrategias de mejora continuaDocumento9 páginasEstrategias de mejora continuaAngela Marcela Diaz FernandezAún no hay calificaciones
- Gestión documental SIGDocumento28 páginasGestión documental SIGJulieth AlvisAún no hay calificaciones
- Anexo Caso Post TareaDocumento3 páginasAnexo Caso Post TareaAngela Marcela Diaz FernandezAún no hay calificaciones
- Anexo 2 Plan de MejoraDocumento1 páginaAnexo 2 Plan de MejoraAngela Marcela Diaz FernandezAún no hay calificaciones
- Anexo 1 - Caso de Estudio Defectos Osos de GomaDocumento8 páginasAnexo 1 - Caso de Estudio Defectos Osos de GomaAngela Marcela Diaz FernandezAún no hay calificaciones
- Informe Final de Obra: Ejecucion Del Proyecto Servicio de Cambio de Luminarias en Almacenes 05-09, Planta ÑañaDocumento10 páginasInforme Final de Obra: Ejecucion Del Proyecto Servicio de Cambio de Luminarias en Almacenes 05-09, Planta ÑañaJohann Nuñez VasquezAún no hay calificaciones
- Tutoría Aprendo en Casa3Documento2 páginasTutoría Aprendo en Casa3Melissa Berrios CoaquiraAún no hay calificaciones
- La Entrevista - Mapa ConceptualDocumento60 páginasLa Entrevista - Mapa ConceptualSol GarciaAún no hay calificaciones
- Ilovepdf MergedDocumento15 páginasIlovepdf MergedJaviera CifuentesAún no hay calificaciones
- Tema 2 Intervencion Con Las Familias y Menores en Riesgo SocialDocumento17 páginasTema 2 Intervencion Con Las Familias y Menores en Riesgo SocialSara Abigail Vizcaino PerezAún no hay calificaciones
- Tuberias y Accesorios PDFDocumento23 páginasTuberias y Accesorios PDFEduardo ZamoraAún no hay calificaciones
- Caso 2Documento2 páginasCaso 2Alexis RojasAún no hay calificaciones
- Cap 3Documento32 páginasCap 3Eduardo E Garcia VAún no hay calificaciones
- Precursores de TerremotosDocumento22 páginasPrecursores de TerremotosJose Maria ZalvideaAún no hay calificaciones
- Semana 1 Sesiones - V Ciclo Experiencia #02Documento43 páginasSemana 1 Sesiones - V Ciclo Experiencia #02Juan Saul Correa CapilloAún no hay calificaciones
- GuiaDocumento20 páginasGuiaYusef MelgarAún no hay calificaciones
- Informe psicológico adolescenteDocumento8 páginasInforme psicológico adolescente05-ES-HU-NATALI PEREZ RAMOSAún no hay calificaciones
- Plan Lector 2021Documento7 páginasPlan Lector 2021Maverick HornaAún no hay calificaciones
- PEA - ADM - LOGISTICA - 4 SemestreDocumento6 páginasPEA - ADM - LOGISTICA - 4 SemestreMarisol RubiñosAún no hay calificaciones
- Clase de Filosofia San PabloDocumento3 páginasClase de Filosofia San Pablomatias cristian alvaradoAún no hay calificaciones
- Practica - PlanillaDocumento9 páginasPractica - PlanillaEstrella J AebmAún no hay calificaciones
- Contrato de servicios consultoría SAT PerúDocumento16 páginasContrato de servicios consultoría SAT PerúMILAGRITOSAún no hay calificaciones
- Potencial de NernstDocumento4 páginasPotencial de Nernsta7024782Aún no hay calificaciones
- Numeros Reales 4 VersionDocumento14 páginasNumeros Reales 4 VersionWilliam VasquezAún no hay calificaciones
- Procedimiento Evaluacion de DesempeñoDocumento9 páginasProcedimiento Evaluacion de DesempeñonorbeAún no hay calificaciones
- El Acohol Daña El Cerebro AdolescenteDocumento1 páginaEl Acohol Daña El Cerebro AdolescenteAlfredo MedinaAún no hay calificaciones
- Acebutolol ClorhidratoDocumento24 páginasAcebutolol ClorhidratoNathaniel PadillaAún no hay calificaciones
- Informe Manejar El EstresDocumento4 páginasInforme Manejar El EstresMara PrietoAún no hay calificaciones
- ESTEBAN LAVERDE Mapa Conceptual Teoria de La ContabilidadDocumento1 páginaESTEBAN LAVERDE Mapa Conceptual Teoria de La ContabilidadEsteban LaverdeAún no hay calificaciones
- ALAIN REYNIER Manual de Viticultura 2012, Ediciones Mundi PrensaDocumento529 páginasALAIN REYNIER Manual de Viticultura 2012, Ediciones Mundi PrensaRolando Mancilla VelizAún no hay calificaciones
- s6 4 Prim Dia 1 Leemos Un Bello PoemaDocumento6 páginass6 4 Prim Dia 1 Leemos Un Bello Poemamonica mendoza galvez100% (1)
- Ley Forestal y Fauna Silvestre - PNPDocumento18 páginasLey Forestal y Fauna Silvestre - PNPCiinttya JhAún no hay calificaciones
- Segundo principio termodinámicaDocumento20 páginasSegundo principio termodinámicaAgustina SanjuanAún no hay calificaciones
- Biotecnologia en AlimentosDocumento17 páginasBiotecnologia en Alimentosjhoan isidoro herrera herreraAún no hay calificaciones
- Informe de La Mejora de Productos Con La Incorporación de TICDocumento11 páginasInforme de La Mejora de Productos Con La Incorporación de TICMarcos Gutierrez Colon100% (1)